В iiciujHHuM авт. св. за 970G5 описано лрнслосоиление для определения угла излома {) гибкого растительного сь1рья 1н:л их предварительного растяжения с но.мсщениой на нлите 1,ент)альной нено.иипкнои онорой и дугово шкалой и подвижными онерами, выиолнеиными и г.нде aaжи.toв, иомещенных иа крайних yiiejfhux П1арнирного четырсхзвенника.
Исдостатко.м этого нрнсносоиленин янляетсн то, что при оиределенн иа нем угла ои не фиксирует нотреиного ycii.iuii на этот излом. Кроме того, в нем не мехаиизи)овацо игремещение четырехзнениика.
В оиисынаемом ирнсиосойлении для устранения зтих недостатков четырехзвенник кинематически соединен с ходовым BHHTOJ ручного и)нвода и с ирижимным дннамометро.м.
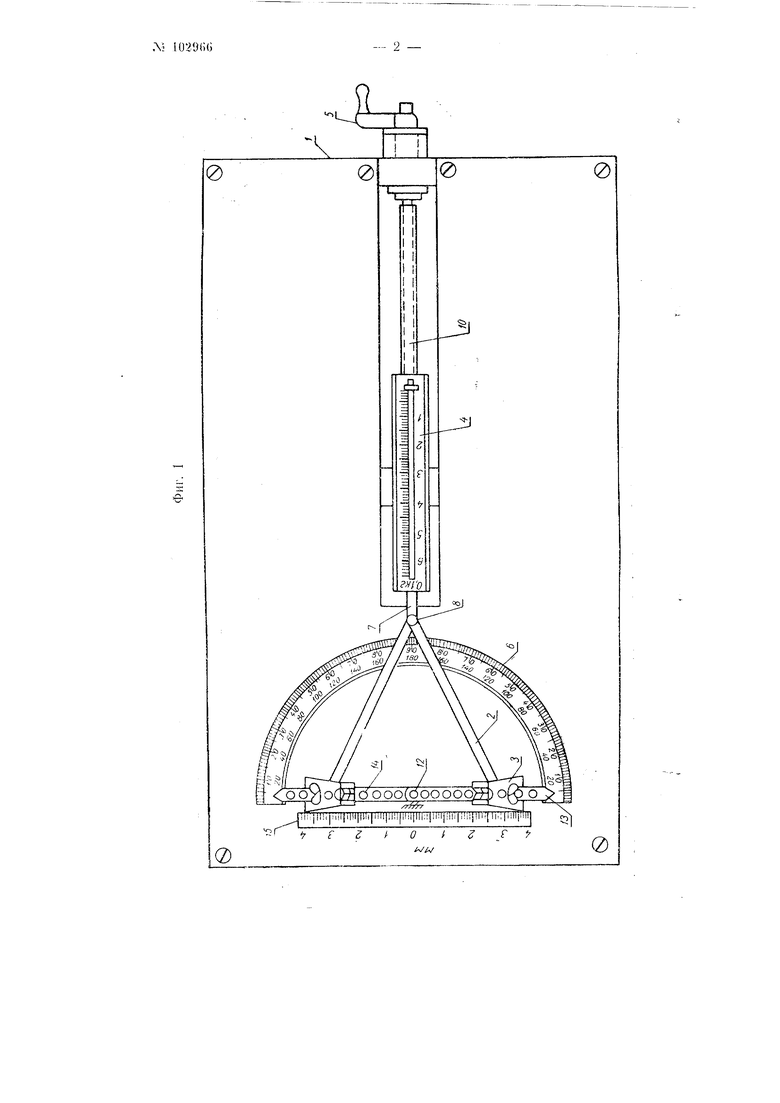
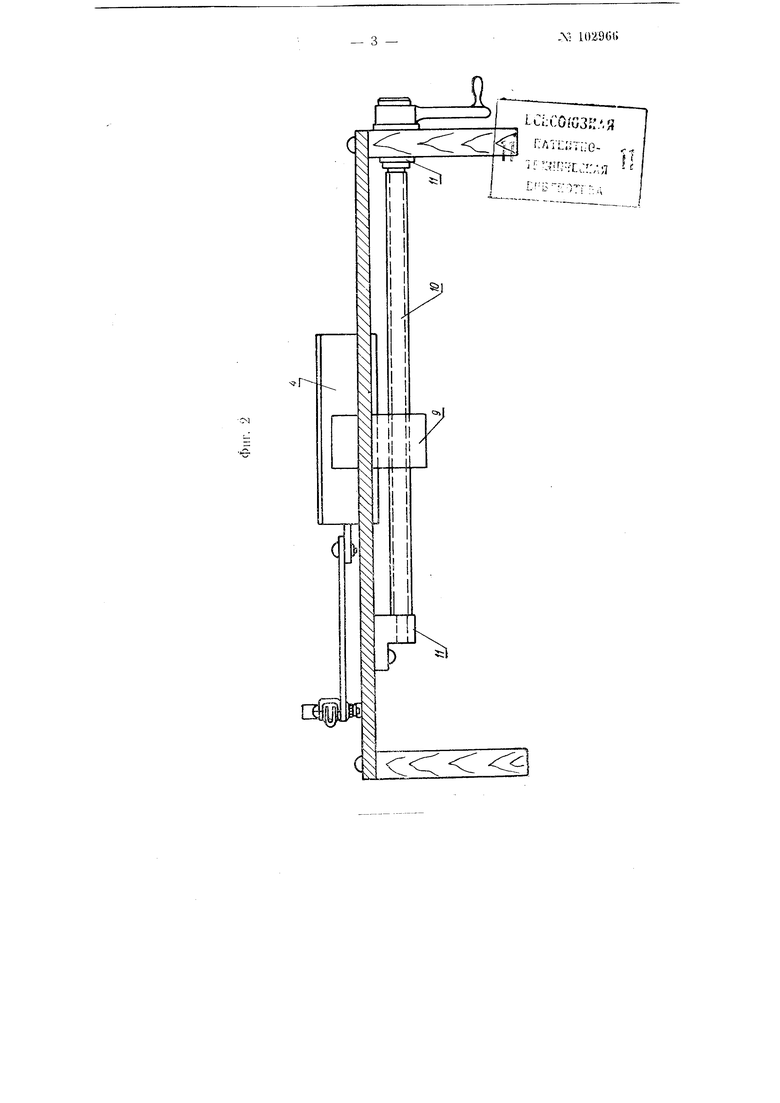
На фиг. 1 тгзображен ил;1Н н)нснособления; на фиг. 2 - Ilii н)одольный ве 1тикальный разрез.
Присиособление состоит из основанлн (.1), игарнириого четырехзвенника (2) с ; ажима51и (i) для образцов, и|)ужинногп динамомет) (.4) .и впнтовий на1)ы с рукояткой (oj.
На ocHoHiiHiiir (1) н|)ИС11особ,иння закреилена дуговая шкала (К) для фикси))вания угла излома.
Одии конец (7) дниамометра (4) соедннен с niapHHiJOM (8) игариирного четырехавенннка (2); в средней; частн иружниный динамомет) (4) соединен с нодвижной гайкон (9) иинтовой иа1)ы, винт
(JU) кит1))ой закреплен в двух оиорах (11) и вра1цается ир)г иомонщ рукоятки (5) унравлення, закренленной на верхjreM конце винта (10).
Процесс работы на нр)снособлен11и осун1,ествляется следующнм образом. В зажи.мах (Н) ;,акренля1от исследуемый гибкого растения, который своей се|1единой ои.чрается на неподвижную опору четырехзвенника. После этого от руки BjianiaiOT рукоятку (5), вместе с; кото1)ой В1)а1цается винт (10). При враН1;снии винта (10) вдоль него лннейно нереме)цается иодвижиая гайка (9), а вместе с ней и пружинный динамо ет|) (I), который тянет за собой шарнир (8) Шарнирного четырехзг,енниика (2) до излома образца. Угол излома фиксируется на дуговой шкале (6) связанными пга) (12) и нм мощими заостренные К1П1цы (13) з еньями, (14). Усилие на излом отсчитывается на нружинном динамометре (1). Для о111 еделения линейного pa3Miiia i;6i)a3U:i 1гри его занравке в пал;им || 1мужнт Н1кала (1о).
с т м е
Пригиосоолснне для онределенин уг.i:i 1гзл(1М;1 образцов гибкого растительного с,11)ья но aiiT. св. IN; 970G5, о T.I и ч а10 1Ц е е с я тем, что, с целые мехавшацин неремещення четырехзвенннка и определеиия усилия н)и изломе пснытуемого образца, четырехзвеиник кинематически соединен с ходовым винтом ручного нрн1Н)да н с Н1)уж11иным динамомет)ом.
,SLn
ч I у
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление для определения угла излома образцов гибкого растительного сырья | 1950 |
|
SU97065A1 |
| Прибор для определения механических свойств стебля | 1957 |
|
SU112417A1 |
| Машина для сортировки зеленого чайного листа | 1955 |
|
SU102052A2 |
| Полевой самопишущий динамометр | 1951 |
|
SU96691A1 |
| Чаеуборочная машина | 1951 |
|
SU96149A1 |
| Ручной автоматический ключ для установки дистанционных трубок к артиллерийским снарядам | 1929 |
|
SU35621A1 |
| Тяговый динамометр | 1955 |
|
SU103627A1 |
| Устройство для регистрации остаточной деформации резины | 1945 |
|
SU68089A1 |
| Устройство для рядовой многослойной намотки электрических катушек микропроводом | 1973 |
|
SU603011A1 |
| Ротационно-конвергентный гамматерапевтический аппарат | 1975 |
|
SU553767A1 |
ji i;|inii iii|i|H|| il|ilii|ll |n:l|llj: |Tl i|illi|;iii|l|lijli ;|lill|il l|
- 7 г г / д t
:Ф
/v-A/
