(54) РОТАЦИОННО-КОНВЕРГЕНТНЫЙ ГАММА-ТЕРАПЕВТИЧЕСКИЙ
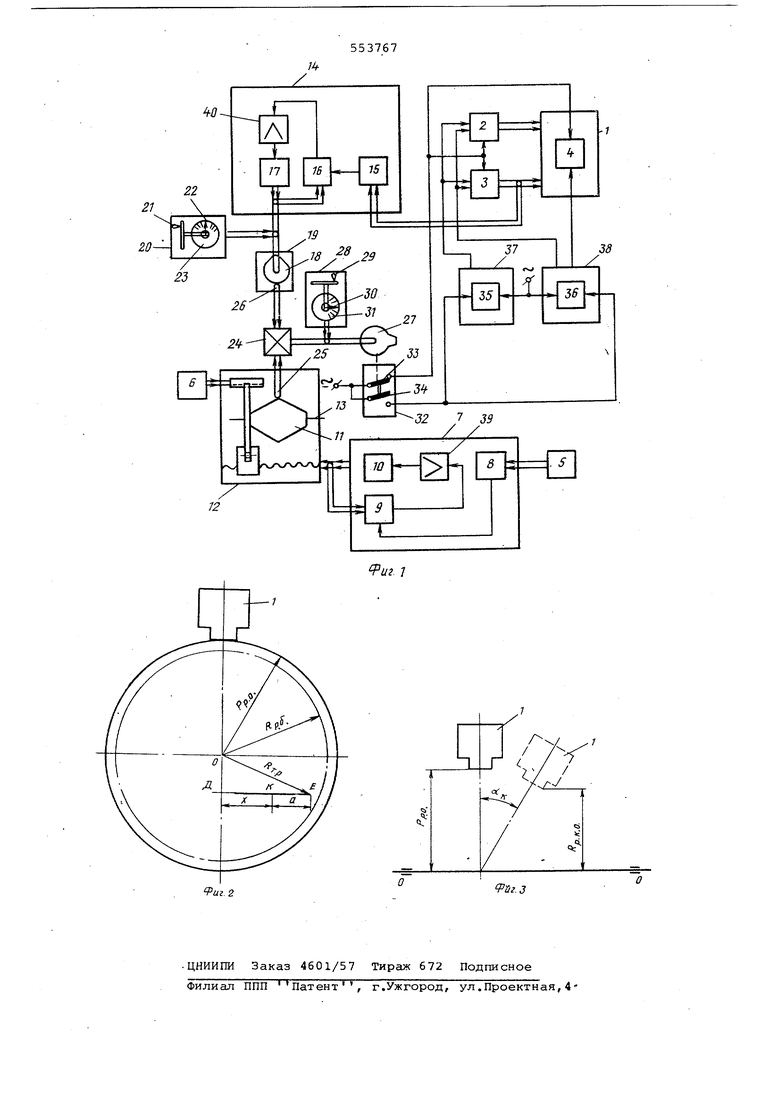
АППАРАТ а осью сателлитов - с механизмом ручного ввода радиуса обметания и с вращающейся осью кулачка, установлен ного с возможностью воздействия на микропереключатель, последовательно включенный своим размыкающим контактом в цепь питания механизма управ/гения затвором и приводов перемеще«ия радиационной головки,а замыкаюIIJИM - в цепь питания элементов сигна лизации, установленных на пульте управления и ручном манипуляторе. Коноид может быть выполнен в форме объемного-вращающегося тела; эксцентрик целесообразно установитьтак, что ось егосимметрии проходит через точку соприкосновения щупа с его поверхностью при нулевом положе нии радиационной головки по оси кон вергенции, а каждый из механизмов ручного ввода может состоять из рукоятки с закрепленным на ней индексом и неподвижной шкалой. На фиг. 1 изображена функциональ ная схема ротационно-конвергентного гамма-терапевтического аппарата; на фиг. 2 - схема взаимного расположен радиационной головки и опорной пане ли стола; на фиг. 3 - радиационная головка при повороте относительно оси конвергенции на угол Ы. Аппарат содержит радиационную головку 1 с приводом 2 ротации и приводом 3 конвергенции и механизмом 4 уг1равления затвором, механизм 5 поперечного и.механизм 6 вертикального перемещений опорной панели (на чертежах не показана). Следящая сиетема 7 своим задающим элементом 8 кинематически связана с механизмом 5 поперечного перемещения опорной панели и электрически - с принимающи элементом 9, подключенным к исполнительному двигателю 10. Исполнительный двигатель 10 кинем тически связан, с принимающим элемен том 9 следящей системы 7 и коноидом JL1 конойдного механизма 12, причем ось 13 вращения, коноида 11 кинемати чески связана с механизмом 6 вертикального перемещения опорной панели Следящая система 14 своим задающим элементом 15 кинематически свя зана с приводом 3 конвергенции ради ационной головки 1 и электрически с принимающим элементом 16, подключенными к исполнительному двигателю 17. Исполнительный двигатель 17 следящей системы 14 кинематически связан с принимающим элементом 16 этой системы, с вращающейся осью эксцентрика 18 эксцентрикового механизма 19 и с механизмом 20 ручного ввода углаконвергенции, содержащим рукоятку 21 с закрепленными на ней индексом 22 и неподвижную шкалу 23. Механический дифференциал 24 кинемати.чески связан одним колесом со щупом 25 конойдного механизма 12, другим - со шупом 26 эксцентрикового механизма 19, а осью сателлитов с вращающейся осью кулачка 27 и с механизмом 28 ручного ввода радиуса обметания, содержащим рукоятку 29 с закрепленными на ней индексом 30 и неподвижную шкалу 31. Кулачок 27 установлен на вращающейся оси с возможностью воздействия на микропереключатель 32, последовательно включенный размыкающим контактом 33 в цепь питания механизма 4 управления затвором и приводов 2, 3 соответственно ротации и конвергенции,а замыкающим контактом 34 - в цепь питания элементов 35 и 36 сигнализации, установленных соответственно на ручном манипуляторе 37 и на пульте 38 управления. Ротационно-конвергентный гамматерапевтический аппарат работает следующим образом. В исходном состоянии радиационную головку 1 устанавливают в нулевое положение, в котором при облучении рабочий пучок излучения будет падать строго перпендикулярно к опорной панели лечебного стола, на которую укладывают пациента перед началом сеанса облучения. Пациента укладывают так, что патологический очаг находится в центре сферы, описываемой радиационной головкой при ее ротационно-конвергентном движении относительно пациента. Для этого перемещают опорную панель в поперченом и вертикальном направлениях механизмами 5 и 6. При этом задающий элемент 8 следящей системы 7 устанавливается в соответствующее угловое положение. Напряжение на его выходе, пропорциональное углу поворота, поступает на принимающий элемент 9, с выхода которого сигнал рассогласования поступает чзрез усилитель 39 на исполнительный двигатель 10, который под действием усиленного напряжения начинает вращаться, поворачивая при этом принимающий элемент 9 и сообщая коноиду 11 поступательное движение посредством кинематической связи. Исполнительный двигатель 10 вращается до тех пор, пока сигнал рассеивания на входе усилителя не будет равен нулю, т.е. пока принимающий элемент 9 не займет такого же точно углового положения, что и задающий элемент 8 следящей системы 7. При перемещении опорной панели в вертикальном направлении от механизма 6 вертикального перемещения опорной панели движение посредством кинематической связи передается на вращение оси 13 коноида 11. В результате этих перемещений опорной панели шуп
25 коноидного механизма 12 поворачивает одно колесо механического дифференциала 24 на угол, пропорциональный текущему радиусу ротации (..) , который описывается следующей формулой:
2 . „2
R V (х + о.) Т.р. « V- -г ti-y у /
где X - величина поперечного перемещения опорной панели;
а - половина ширины опорной панели (величина постоянная);
у - величина вертикального перемещения опорной панели.
На фиг. 2 показана схема опорной панели лечебного стола при его смещении от нулевого положения в вертикальном и поперечном направлениях. Отрезок ОД соответствует смещению по вертикали, ДК - смещению физической середины опорной панели в поперечном направлении, а отрезок ОЕ величине текущего радиуса ротации для рассматриваемого .случая.Текущий радиус ротации является функцией от независимых переменных: величин вертикального и поперечного перемещений опорной панели. Радиус обметания Нро, радиационной головки при ротационном движении (величина постоянная) для каждого конкретного типа аппарата и радиус безопасности Rpjtf., несколько меньший, чем Rp.o.iFa величину, достаточную для беспрепятственного перемещения радиационной головки вокруг опорной панели стола
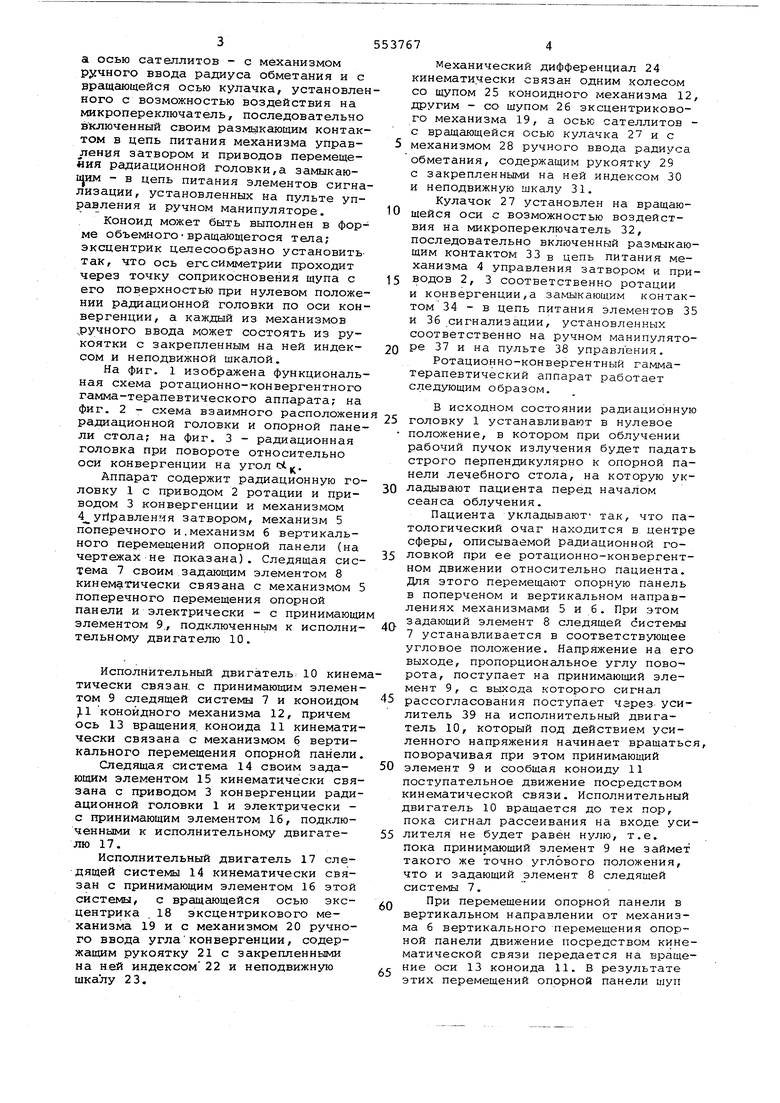
При повороте ротационной головки 1 на угол с по оси конвергенции (см иг. 3) радиус обметания Rp.o. уменьшаетс.яна величину Rp.o.- Нр.кл. в зависимости от угла конвергенции. На фиг. 3 показан этот уменьшительный радиус Rp.iio. .
При этом угол поворота радиационной головки по оси конвергенции может быть .введен при помощи следящей системы 14, задающий элемент 15 которой установлен к кинематической цепи-привода 3 конвергенции радиационной головки. При повороте радиационной головки 1 на заданный угол по оси конвергенции напряжение, пропорциональное этому заданному углу, поступает на принимающий элемент 16, с выхода которого сигнал рассогласования поступает через усилитель 40 на исполнительный двигатель 17. Последний под действием усиленного напряжения начинает вращаться, поворачивая при этом принимающий элеме.нт 1 и эксцентрик J.8 эксцентрикового механизма 19. Исполнительный двигатель 17 будет вращаться до тех пор, пока сигнал рассогласования на входе усилителя 40 не будет равен нулю, т.е. пока принимающий элемент 16 не займе такого же точно углового положения, что и задающий элемент 15 следящей системы 14.
Угол поворота радиационной головки по оси конвергенции может быть также введен при помощи механизма 20 ручного ввода угла конвергенции, что позволяет сократить время укладки, так как не требуется проверка радиуса безопасности путем включения привода 3 конвергенции. При этом рукояткой 21 с закрепленными на ней индексом 22 по шкале 23 устанавливается величина максимального угла поворота радиационной головки по оси конвергенции. После проверки индекс 23 посредством рукоятки 21 устанавливается на нулевой отсчет.
При повороте,эксцентрика 18 эксцентрикового механизма 19 щуп 26 поворачивает другое колесо механического дифференциала 24 на угол, пропорциональный измерению радиуса безопасности при ротационном движении головки от углов поворота радиационной головки по оси конвергенции Механический дифференциал осуществляет алгебраическое сложение величи перемещений щупов коноидного механизма 12 и эксцентрикового механизма 19 и одновременно передает результат Этого сложения на вращение .кулачка 27, который предварительно, развернут своим выступом на некоторый, пропорциональный.радиусу безопасности, угол относительно микропереключателя 32. Угол предварительног поворота выступа кулачка 27 может быть изменен посредством рукоятки 29 механизма 28 ввода радиуса обметания При этом индекс 30 устанавливается по шкале 31 напротив отметки, соответствующей определенному радиусу обметания. Радиус обметания для каждого аппарата является величиной постоянной при. ротационном движении.
При совпадении текущего радиуса ротации с радиусом безопасности, т.е Когда Rp. Rp.T., угол поворота кулачК-а 27 относительно микропереключателя 32 становится равным нулю,кулачок 27 выступом воздействует на микропереключатель, который срабатывает и размыкающим контактом 33 снимает питание с механизма 4 управления затвором и приводов перемещения радиационной головки, и замыкающим контактом 34 включает питание на элементы 35 и 36 сигнализации.
После того как на ручном манипуляторе 37 появится сигнализация о том, что радиационная головка может войти в контакт-с опорной панелью лечебног стола при ее движении во время облучения, вновь производят укладку так, чтобы сигнализация не срабатывала. После правильной укладкл переходит из процедурного помещения, где установлены аппарат и ручной манипулятор, в помещение операторской, где установлен пульт 38 управления, с jпомощью которого задаются все парамеры облучения и подаются сигналы на Перемещения радиационной головки и открытие затвора. Если в процессе облучения произой дет смещение опорной панели лечебного стола (вследствие каких-либо неис правностей или ошибок обслуживающего персонала)или произойдет превышение максимально возможного для облучения пациента положения радиационной головки по оси конвергенции и при этом эти величины превысят максимально возможное для безопасного прохождения радиационной головки вокруг опор ной панели, то сработает микропереключатель 32, который отключая питание механизма 4 управления затвором и приводов ротации и конверге ции. При этом затвор закроется, а радиационная головка, если она двигалась, останавливается. На пульте 38 управления срабатывают элементы 36, подавая сигнсш о возможности аварийной ситуации. Пос ле устранения неисправностей, о чем свидетельствует отключение сигнализации, сеанс лечения может быть про .должен. Применение предлагаемого аппа-. pata позволяет значительно сократить время укладки пациента при одновременном предупреждении возможных аварийных ситуаций для ротаци.онно-конвергентного и многопольного статистического облучения, вследствие чего повышается пропускная способность кабинетов лучевой терапии, уменьшается лучевая нагрузка на обслужив щий персонал, обеспечиваетс повышение безопасности при клиничес эксплуатации аппарата.i Формула изобретения 1. Ротационно-конвергентный гамма-терапевтический аппарат, содержащий установленную на штативе ради ационную головку с приводами ротации и конвергенции и с механизмом управления затвором, лечебный стол с основанием, опорной панелью не, механизмами ее вертикального и попе речного перемещений, пульт управления и ручной манипулятор, о т личающийся тем, что, с целью исключения столкновений радиа ционной головки с опорной панелью лечебного стола при ротационно-конвергентном и многопольном статическом облучении, он дополнительно содержит коноидный механизм с коно-т идом, выполненным симметричным отно сительно оси, перпендикулярной к оси его вращения, со щупом, две следящие системы с задающим и принимающим элементами и исполнительными двигателями, эксцентриковый механизм с симметричным эксцентриком и щупом, механизмы ручного ввода угла конвер генции и радиуса обметания головки, механический дифференциал, кулачок, шкропереключатель и элементы сигна-. лизации,при этом ось вращения коноид кинематически связана с механизмом вертикального перемещения опорной панели,а сам коноид - с исполнительным.двигателем и с принимающим элементом, следящей системы, через задающий элемент кинематически связанной с механизмом ,поперечного перемещения опорной панели стола, вращающаяся ось эксцентрика кинематически связана с механизмом ручного ввода угла конвергенции, с принимающим элементом и с исполнительным двигателем следящей системы, через задающий элемент кинематически связанной с приводом конвергенции, механический дифференциал одним колесом связан со щупом коноидного механизма, другим - со щупом эксцентрикового механизма, а осью сателлитов - с механизмом ручного ввода радиуса обметания и с вращающейся осью кулачка, установленного с возможностью воздействия на микропереключатель, последовательно включенный размыкающим контактом в- цепь питания механизма управления затвором и приводов пер.е мещения. радиационной Головки, а замыкающим,- в цепь питан ия элементов сигнализации, установленных на пульте управления и ручном манипуляторе. 2.Устройство по п. 1, отличающееся тем, что коноид выполнен в форме объемного вращающегося тела. 3.Устройство по п. 1, отличающееся тем, 1то эксцентрик установлен так, что ось его симметрии прохйдит через точку соприкосновения тупа с его поверхностью при нулевом положении радиационной головки по оси конвергенции. 4.Устройство по П.1, о т л и чающееся тем, что каждый механизм ручного ввода состоит из рукоятки с закрепленным на ней индексом и неподвижной шкалой. Источники информации, принятые BQ рнимание при экспертизе 1. Проспект в/о Изотоп .на1 Рокус-М. 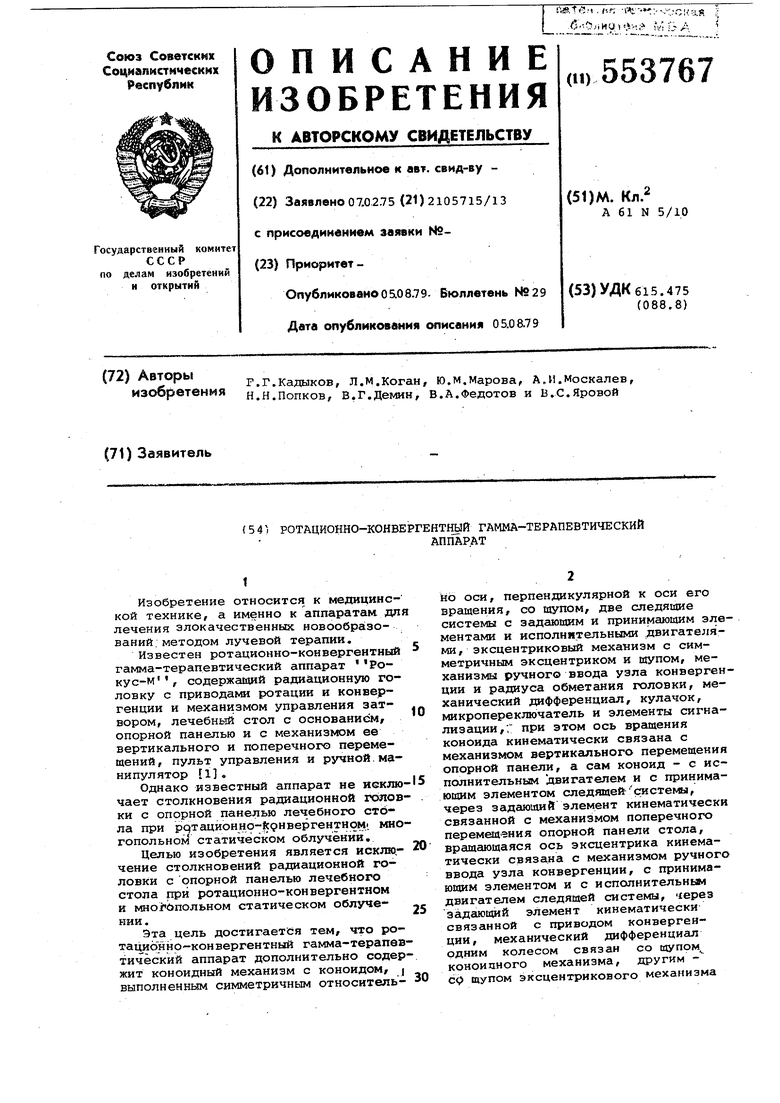
| название | год | авторы | номер документа |
|---|---|---|---|
| Гамма-терапевтический аппарат | 1975 |
|
SU534895A1 |
| Устройство для регулирования натяжения ровницы на ровничной машине | 1983 |
|
SU1142537A1 |
| Устройство для качания и вращения контейнера ротационно-конвергентного гамма-терапевтического аппарата | 1961 |
|
SU141554A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОБЪЕМА ШТАБЕЛЕЙ "^"^ -- СЫПУЧИХ МАТЕРИАЛОВ С ТРЕУГОЛЬНЫМ ПОПЕРЕЧНЫМ СЕЧЕНИЕМ | 1966 |
|
SU181827A1 |
| Комбинированный привод | 1980 |
|
SU885985A2 |
| КОМПЕНСАЦИОННОЕ УСТРОЙСТВО ДЛЯ ВЫРАБОТКИ СКОРОСТИ ГИДРОДИНАЛ1ИЧЕСКОГО ЛАГА | 1967 |
|
SU204036A1 |
| ГАММА-ТЕРАПЕВТИЧЕСКОГО АППАРАТА | 1971 |
|
SU307596A1 |
| Устройство к ротационному аппарату для формирования заданного дозного распределения в объекте | 1977 |
|
SU604210A1 |
| Педальный регулятор трепальной машины | 1974 |
|
SU541904A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО | 1971 |
|
SU297969A1 |