ЧР
-HD
KD
«1
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом перемешивания в реакторе полунепрерывного действия | 1980 |
|
SU889077A1 |
| Способ автоматического управления процессом жидкостной экстракции | 1986 |
|
SU1313480A1 |
| Способ регулирования процесса перемешивания в аппаратах с мешалкой | 1977 |
|
SU689713A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2299094C2 |
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИМЕТИЛСИЛСЕСКВИОКСАНА | 2019 |
|
RU2751345C2 |
| СПОСОБ И УСТАНОВКА ДЛЯ ПОЛУЧЕНИЯ БИТУМА | 2013 |
|
RU2562483C9 |
| ФЕРМЕНТАЦИОННАЯ УСТАНОВКА ДЛЯ МЕТАНАССИМИЛИРУЮЩИХ МИКРООРГАНИЗМОВ | 2015 |
|
RU2580646C1 |
| ПУЛЬСАЦИОННО-ЦЕНТРОБЕЖНЫЙ СМЕСИТЕЛЬ | 2008 |
|
RU2379098C1 |
| Вискозиметр | 1981 |
|
SU979961A1 |
| СПОСОБ ПОЛУЧЕНИЯ N-ЗАМЕЩЕННЫХ-5-ФЕНИЛТЕТРАЗОЛОВ И МИКРОРЕАКТОР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2559369C1 |
СПОСОБ РЕГУЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕШИВАНИЯ В АППАРАТАХ С МШАЛКОЙ путегл изменения скорости вращения i мешалки в зависимости от отклонения технологического параметра от заданного, отличающийся тем, что, с целью повьпиения эффективности перемешивания и снижения энергозатрат за счет повышения точности регулирования, скорость вращения мешалки изменяют с учетом распределения концентрации дисперсной фазы по высоте реактора и изменения расходов сплошной и дисперсной фаз. 4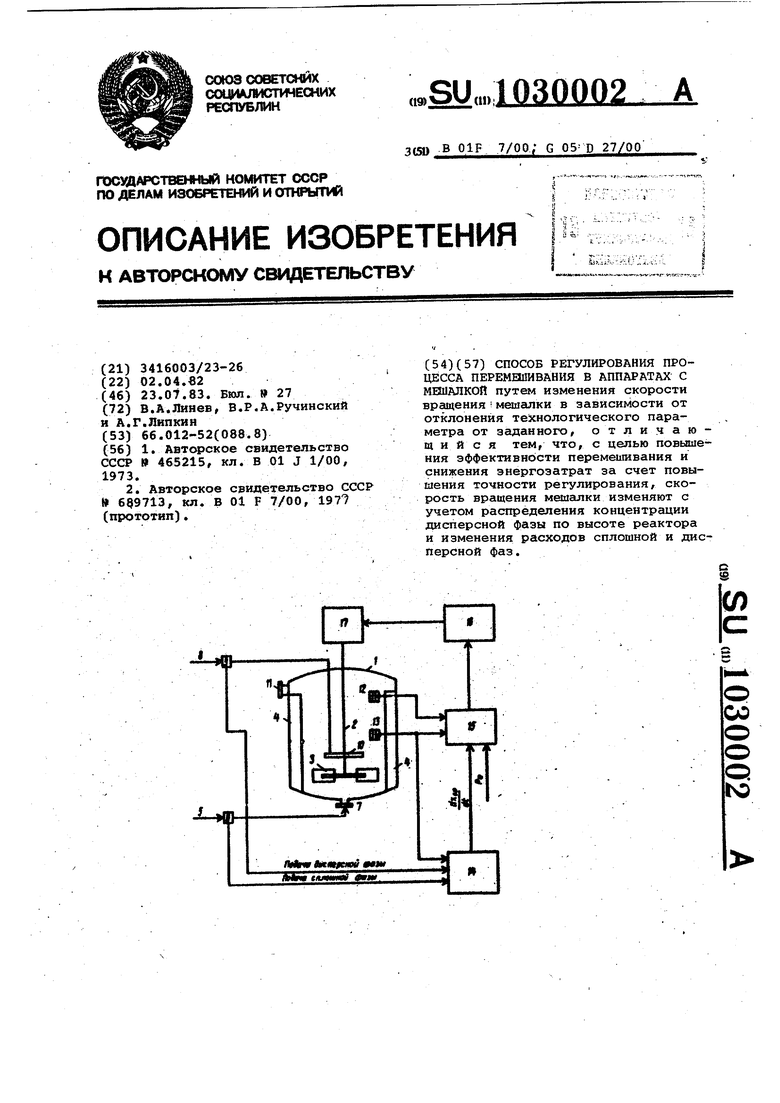
ЛМгаг Лмяммм ««w Изобретение относится к химической технологии, в частности к процессам управления перемешиванием, и может быть использовано в химической, лакокрасочной, нефтехимической и других отраслях промышленности. Известен способ регулирования процесса перемешивания в аппаратах с мешалкой путем изменения вращения вала в зависимости от вязкости перемешиваемой среды и ее объема tl Недостатком такого способа является низкая эффективность регулирования, так как мощность, затрачиваемая на перемешивание, определяется не только вязкостью перемешиваемой среды, но и другими факторами, не учтенными в данном способе плот но ст ь ю п еремеши в аемой среды, ра з ностьй напряжений межфазового контакта, диаметром аппарата и его отношением к диаметру мешалки, типом перемешивающего устройства. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является, способ регулирования процесса перемешивания с в аппаратах с мещалкой путем изменения скорости вра14ения вала в зависимости от глубины воронки пере-мешиваемой жидкости 21. Недостатком такого способа является то, что ОН применим только для гладкостенных аппаратов. Для аппаратов с внутренними теплообменными устройствами, а также для аппаратов с отражательными перегородками, такой способ неприменим, так как в .аппарате отсутствует воронка, а име но такие аппараты широко применяютс в промьилленности. Цель изобретения - повышение ; эффективности перемешивания в реакто рах с отражательными перегородками и снижения энергозатрат за счет повышения точности регулирования. Эта цель достигается тем, что скорость вращения мешалки изменяют с учетом распределения концентрации дисперсной фазы по высоте реактора и изменения расходов сплошной и дис персной фаз. Существует оптимальная скорость вращения вала мешалки, при которой I достигается требуемое качество пере мешивания при минимальной затрате мощности, повышение скорости приводит к избыточным энергозатратам, снижение скорости - к ухудшению пер мешивания. За критерий качества перемешивания в берется распределени концентрации дисперсной фазы, по высоте реактора, которое при отборе сверху подчиняется зависимости Ре ср еРе - концентрация дисперсной фазы вверху реактора (на выходе); ХСР средняя концентрация дасперсной фазы в реактореv Ре - число Пекле} Дт Н - высота заполнения реактора,; м при отборе сверху в процессе перемешивания не изменяется f - средняя скорость осаждения (всплывания) капель дисперсной фазы, м/с; . - коэффициент турбулентного переноса, м/с f4 РД-РС , 0.06rVVv n-2.d-, -fS/Uc с 2Ад ЗД-с Д 0,435.D-nd, ( - поверхностное натяжение на , границе раздела фаз, П/м f - плотность сплошной фазы, . р - плотность дисперсной фазы, кг/м р - плртность перемешиваемой среды , V - объем перемешивания, м п - скорость вращения мешалки, d - диаметр мешалки, м D - диаметр аппарата, м;. yu-j. - вязкость сплошной фазы, Па-с; уид- вязкость дисперсной фазы, П - параметр, зависящий от конструкции мешалки. дбщем виде зависимость концентрана выходе можно представить в 1 х, fr( уУ - функция средней ности перемешиваемой жидкости акторе, зависит от соотношения ч смешиваемых дисперсной и сплошфаз. э(Рс. .РА D, .n)-функция ; сящая от конструкции аппарата и , лки, характеристик .перемёшиважидкостей. Для данного технолоского процесса (перемешивание деленных жидкостей в реакторе деленной конструкции) Ф . const. ходе ведения процесса может изься плотность перемешиваемой вследствие соотношения подач ешиваемых жидкостей , что прик необходимости изменения заваемой на переманивание мощ.
Система управления учитывает эти изменения, ангшизирует их и выдает соответствующее воздействие на двигь.тели для увеличения или уменьшения скрести вращения.
На чертеже представлена схема реализации способа для реактора перемешивания в системе жидкость-жидкость.
Реактор состоит из корпуса 1 цилиндрической формы, в-котором соосно на валу 2 размещена мешалка 3. Реактор снабжен вертикальннтда отражательными перегородками 4 высотой Н. Сплошная фаза перемешивания (парараметры PJ, , jUc. )поступает по линии 5 через расходомер б во входной патрубок 7. Дисперсная фаза перемешивания (параметры рд (Lc.,) посту пае т по линии 8 через расходомер 9 на щелевой распределитель 10.
Перемешанный раствор выводят из реактора переливом через выходной патрубок 111 В реакторе установлены датчики 12 и 13 концентрации, сигнапы которых поступают в логический блок 14 и устройство 15 управления, связанное с помощью исполнительного ме.ханизма 16 с электродвигателем 17 мешалки.
Способ регулирования осуществляется следующим образом. „
Устройство управления 15 получает от датчика 12 концентрацию xg, части реактора, а из средней части реактора - концентрацию х от датчика 13.В зависимости от соотношения Xgjj,, и Xj.p устройство управления вЕЗдает на исполнительный механизм 16 управления двигателем 17 соответству1сяцее воздействие: если
Ре
ВЫХ
, скорость двие
гателя увеличивается, если х
Ре
X
, скорость двигателя
Р е - 1
уменьшается, ч
Кроме того, стабилизацию режима перемешивания И устранения перерегу-, лирования (пульсаций Jосуществляет контур управления по скорости изменения регулируемого параметра (датчик б расхода сплошной фазы, датчик
0 9 расхода дисперсной фазы, логический блок 14, устройство 15 управления, исполнительный механизм 16, двигатель 17 ).
Таким образом,, общая зависимость
5 скорости вращения мешалки меет вид
dXc-F
иСХср. . Ре.
);
ВЫХ
где: критерий Ре задает требуемое качество перемешивания. Расходы дисперсной фазы с датчика 9 и сплошной фазы с датчика 6 подаются на логический блок 14, что с учетом существукидей концентрации Х(.р в реакторе и объема перемешиваемой жидкости фор- мируется сигнал dx. /dt, поступающий в блок 15 управления для корректировки управления двигателем.
Применение способа позволяет значительно (на 30-50%) снизить энергопотребление реактора, так как позволяет минимизировать мощность, потребляемую двигателем по критерию качества перемешивания, т.е. является оптимальным с точки зрения энергозатрат. Кроме того, способ позволяет получить конечный продукт постоянного состава за счет стабильного режима перемешивания.
Экономический эффект от внедрения способа регулирования на ,трех реакторах стадии гипохлоритной очистки В производстве |к ащ олактама (составит 25 тыс. руб. .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ автоматического управления полунепрерывными процессами в реакторе | 1973 |
|
SU465215A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ регулирования процесса перемешивания в аппаратах с мешалкой | 1977 |
|
SU689713A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
