Кинематический анализ плоских механизмов с низшими парами чаще всего производится графоаналитическим путем, требующим построений для ряда положений механизма. Это весьма трудоемкая операция. Для ряда механизмов разработаны аналитические .методы исследования, которые даже применительно к механизмам простейшего типа очень сложны.
Предметом изобретения яв.. яется злектрическая модель плоского механизма с низшими враш,ательными парами, позволяюшая ускорить nporiecc исследования такого механизма.
Согласно изобретению, модель содержит фазовраш;атели, которые имитируют отдельные звенья плоского шарнирного механизма, питаются от общего источника синусоидальноIo тока и соединяются на выходе совместно с электроизмерительным прибором в замкнутый электрический контур, соответствующий векторному контуру исследуемого механизма.
Решение задачи о положениях для плоских механизмов с низшими вра1цательными парами сводится к решению векторного уравнения, выражающего условие замкнутости заданного механизма.
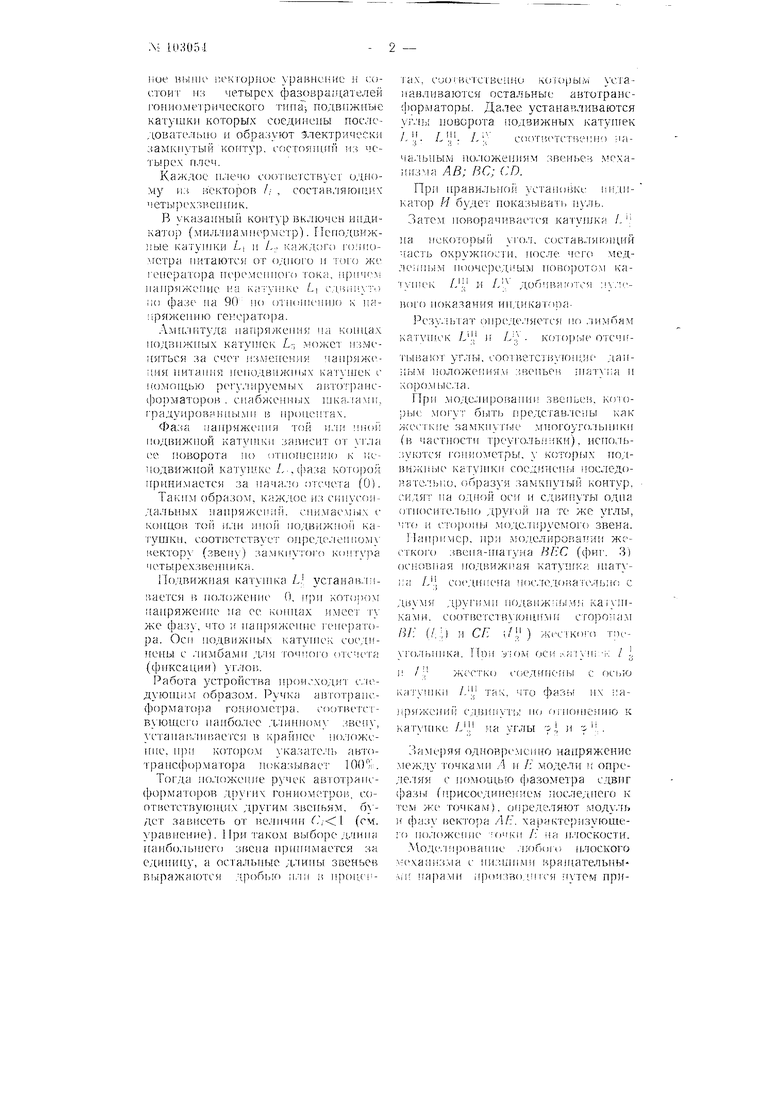
В качестве примера на фиг. 1 представлена схема шарнирного четырехзвенника; на фи1. 2 - принципиальная схема электрической модели этого механизма; на фиг. 3 - схе.ма жесткого звена-шатуна и принципиальная схема электрической модели четырехзвенннка.
Д.пя любого положения ведущего звеиа ш-арнирного четырехзвенннка (фиг. 1) векторное уравнение, выражающее условие замкнзтости контура, можно представить в виде:
sin mf - C-jSin () CySiii (wf -,) - CtSin (,.( ft) (K
/., /..
. J
-. 1; c;., -
b:; - -
/,
постоянные д.1Я д;ш1111|п мсИ C, --,;iHH.4M.-i ие.-шчнны:
-i,: а.: .,; iij - vjvihi, xap;i Tepu:i ющне coоткстстиующпе положения : иеньеи.
Значение f, принимается равным нулю: -f 0.
Каждое слагаемое уравнения представляет собой синусоидальное напряжение, отражающее положение соответствующего звена механизма в данный момент, причем каждое звено рассматривается в виде вектора
(/ь 4; /з; /4).
Электрическая модель шарнирного четырехзвенника решает приведенiioe Hhiiiii iuM ropJioe уравнсн.ке н coСТОИ1 1-13 четырех фазозра;л;ателей гониоли трического тппа; подвижные катушки которых соединены поеледова-1-е.т1,11о и образуют Злектрическм замкнутый Koi-гтур, сг)стояиип 1 нз четырех плеч.
Каждое гктечо еоотиетствуст одному из некторов // , еоетаЕ ляюниХ чет1 1рех:-,.
В указанный контур включен HIIAHкато}) (мил.лнамнерметр). 11епо;а. KaTyujKH L| ii L.. ажд;)го roinioметра нитаются от одного н IXH/O же генератора HepeMCHHciio тока, н) нанряженне на 1 ; уп1ке L e/iHiiiiyro iio фазе- на 90 но OTHOHICHHJO к iia(ряженню гегератора.
Амн;1Гчтуда наг1ряження я коннах нод;знжных катунгек L-, может н:-;менятьея за ечет 1;змене -1}ги чан|)яж(ния ннтання ненодв11Ж1М)1х катун1ек е ножнцью p(My.HipyeMiii а ито.ра неформаторов . снабженных lUKa.iaMi, радунров..ннылн и iipoHeirrax.
Фаза 11ан|.)яжен1 я той i..Hi iHioi; нодвижнюй катушки от yi.:ia (;е поворота но отнсниению к ненодвяжной /,.,(1) кот()рой грннимается за нача.. отсчета (0).
Таким образом, каждое нз еннусон.тальных нанряжегн , снимаемых с ког(цов ТОЙ н.ти i-Hioii нодвижноГ| каTynjKH, соот1 етствует онредсчтенiioM кектор} (звену) .мкнуто|о кон1ура четырехзве1Н1нка.
Подвижная катунн а V: уставав.тн1.ается в но.тоженне О, ifpH кото) нанряженне на ее KoiHiax имеет ту же фазу, что к нанрл1женне reirc-paTopa. Оен подвижных катугне;; соединены е .чимбалнг д.пя )го отсчета (фнкеании) yr.Tois.
Работа устройства нроисхо,тит с.чс:дуюн1н.м образом. Ручка автотранс.формато})а гониометра, соответствующего нанбо.тее .I.IHIHIOMX з,, уста11а1.1нваетея в крайнее но,чоженне, нрн котором указаихчь автотранс(юрматора н(казывае1 .
Тогда но.ложен,)е ручек автотранеформаторов другнх гониометров, соответствуюн1,нх другим звеньям, будет зависеть от велнчнн ., I (см. уравнение). При тако.м выборе д.тнна нанбо,тынего з(4ена нрнннмается за единину, а остальные длины звеньев В1яража1отся .-гробыо н.чи н нронс тах, cjoi иетстве-ню коюрьнл чстанавлнваются остальные автотранеформаторы. Далее устанавливаются yivibi новорота нодзижных j aTyHieK
ча.чьным но.тожениям зве1-Н) меха; изма А В; ПС; CD.
Прн нравильной устано15Ке и индикатор И будет ноказыват) нуль. .Затем поворачиваете KaTyHJKa А
на некото11ый уго.т. соетав.тя1ои1,нй часть окружности, нос.ле чегс) медле:чТ1Ь м нооче)еД|ым новоротом каivHieK /J, и /J доби1ииотся HN.U)ioro нока.чання индикатора1 с-.зу.: Ь1ат . 5готся но лимбам кат Н1ск L,, н //. . ксчорь е отечитывают углы, соотпетств ТО и;и( данiH- iM ноложенням .чрдмн еи н лО)о.мьк:.1а.
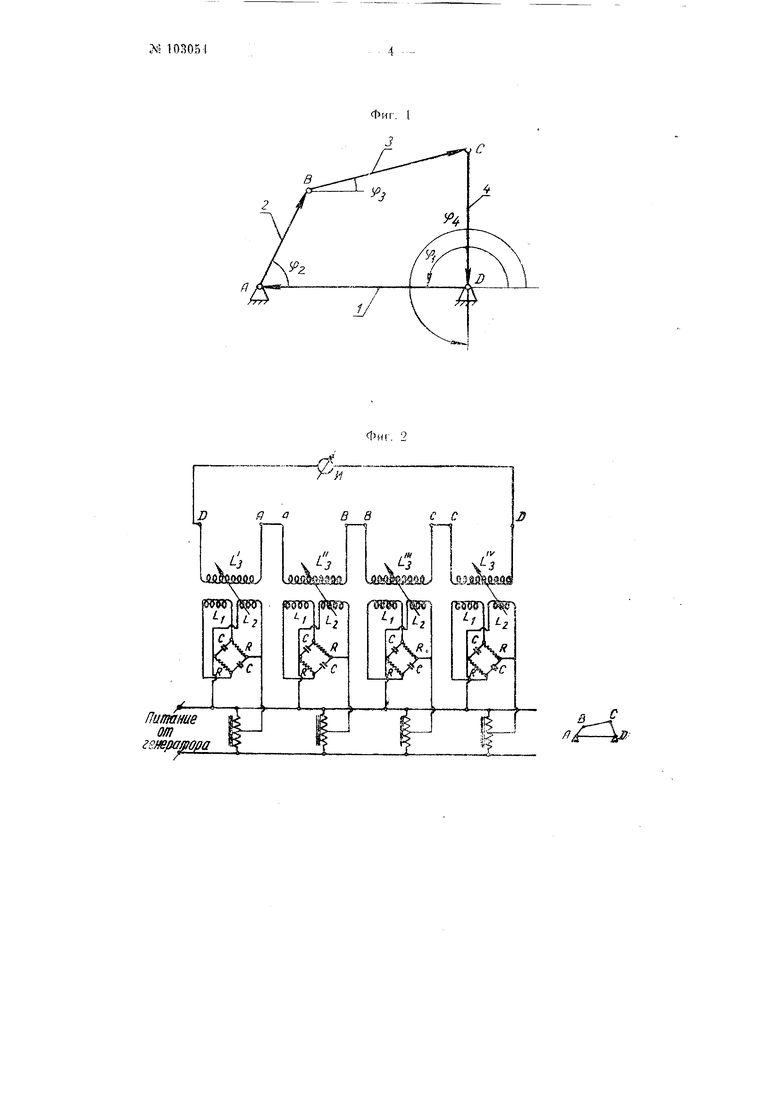
П)н .моделнрова1нн звеньев, коюрыс; могу - б1)Ггь нредетав.1ены как жчнтк.не замкнутые мтюгоуго.тьннкн (в чаетностн т)еуг(),ть,4;1кн), иено.ль.чуются гониолтетры, у котор 1х нодвн/лные сосдннены носледонате.)ио, образуя замкну ый контур. сч-1Д5гт на о.:и1)й oeir н сдвинуты одна относительно д)угой на те же углы, чт( н стороны .моде.лируемого звена. 11анрн 1ер, при мо.телирог аг ин жеCTKOio звеня-н(атуна НЕС (фнт. 3) ос1;овная нодвнжная катун ка Н ат :;; А . со( иос.те.чова ельно с
двумя Дру|1 Н1 НОДВНЖ Г)МН KaiyHIка м и. соответсп ним н cTOjWia м ПГ. (..} н СГ. ;/,) Ж1-стког( тпеу|о,тьннка. Ион -у(л оси ivfriyHi ч-: / i н / жестко соединены е ось;о /JV , что фазь их iiaнряжен1н Сд.вниут,: H(I ошошению к катутике А . ка углы , н fL
1аме)яя одновре.менно напряжение меж.чу 1Т)чка.н1 А и /; модели ; опреде.гяя с н()монняо (|)азометра сдвиг {разы (HpHcoe/iHuei-HeM .него к тем же- точкам), онре.деляют моду.ть и cjia3 вектора АИ. характернзуюшего ноложепис- очкн /; на н.чоскостн.
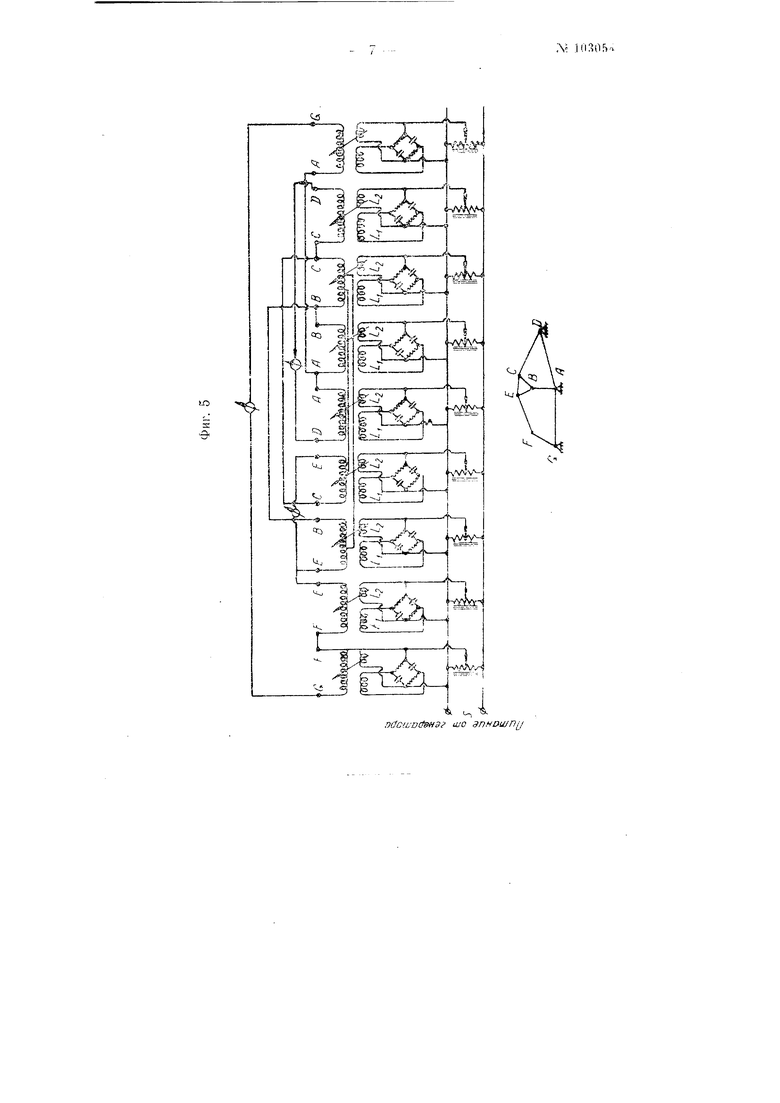
.1од(.Н1 ров анис ,-1 обого илоекого м( е нн:-нннмн врннательны: iT нронзно.:,нгея путем присоединения к модели основного механизма первого класса пероого порядка (стойка-кривошип) -моделей любой грунпы Ассура, образованно и из комбинации соединений концов подвижных катушек гониометров.
Иа фиг. 4 показан механизм второго класса второго порядка i моде.:и этого механизма, а на фиг. 5 механиз.м и моде.ть механизма Tpeiheio класса третьего порядка.
11 |.) е л. м е т н 3 о б р е т о i; ii
1. Электрическая модель н.тоского механизма с низшими вращательными парами. о т л и ч а ю ш, а я с я тем, что она содержит фазовращате., которые ил;итнруют отдельные звенья нлоского шарнирного механизма, питаются от общего источннка сннзсондального тока и соединяются на выходе совместно с электроизмерительньп прибором i за: 1киутый электрический контур, соответствующий векторному контур} исследуемого механизма н регулируемый фазовращателями на нулевое значение
протекающего в контуре Т()ча, соогй-стствующее замк11 тост11 ве1 тгфнс.г() контура.
2.Электрическая модель по н. , о г .1 н ч а ю HI, а я с я тем, что, с нельо исследования мехащзмов со зв.ньям ; раз.тнч1НУ.х длин, (|)азог;раHiaie.Tii под.ключены к нитаиня через ,т1 руемыс invroTpaiic1|)орматоры.
3.В э,тектрг,чсскоГ( MO/U-.TII по Г|Н. 1 1 2 применение (ЬазоврааииС.теГ i оино.метркческого типа с новоротной ка;ушк()Г|, нсно.тьзуемой в качестве выходного элемсг.та фазовр;ниате1Я.
4.Электрическая Mfx:i,e,ib н. 3, о Т .т н ч а ю Hj, а я с я тем. что г.рн модсмировании звеньев. к(Г Ч1рыс . быть нредстав.тень как жесткие :.амк11утые нloгoyгoльннкl (в чаCTiiocTi Tj evrixibHiiKH), )катуни н гончометров, имитирующих жесткое звено, соединены нос.чедоватсльно в замкнутый контур, закреи,теиь иа одной осп и расно.тожены относительно другой нод теми же уг.чамн, что и стороны моде.тируемого ,вена.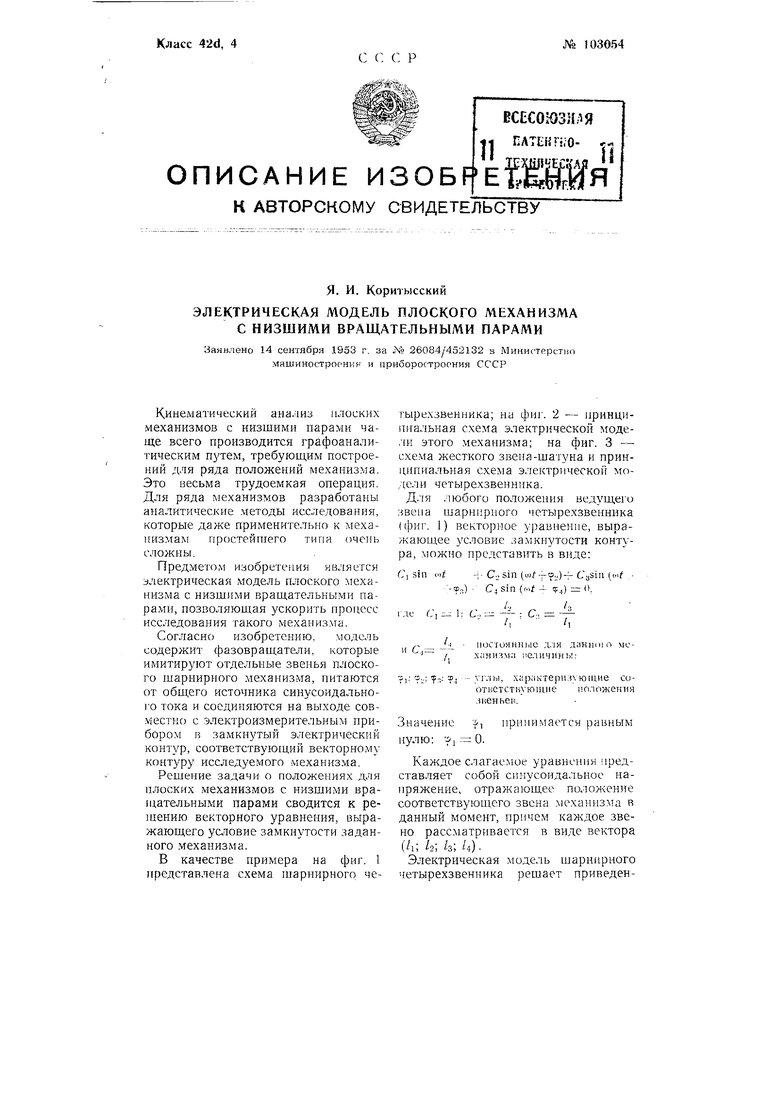


Питание
от гЗ к/юшора
Фиг. 2
/7у
,
cs
--2.
c,
0
-«Э
c:v«
i.., -A .l
3 сJ
:r
Й i A j
CV,. ,.§/c.i:
-ж
- iTpiri i .-,
i o
a s / - o- A cj
f. r4 t-f --,1k- VT
Л/-4
tijf tx-.e.. - -.n. L
,- ...-.. «.
-- P 4S..i
j K- i
cJ, fc- S
& -U
xk±. |..,.
