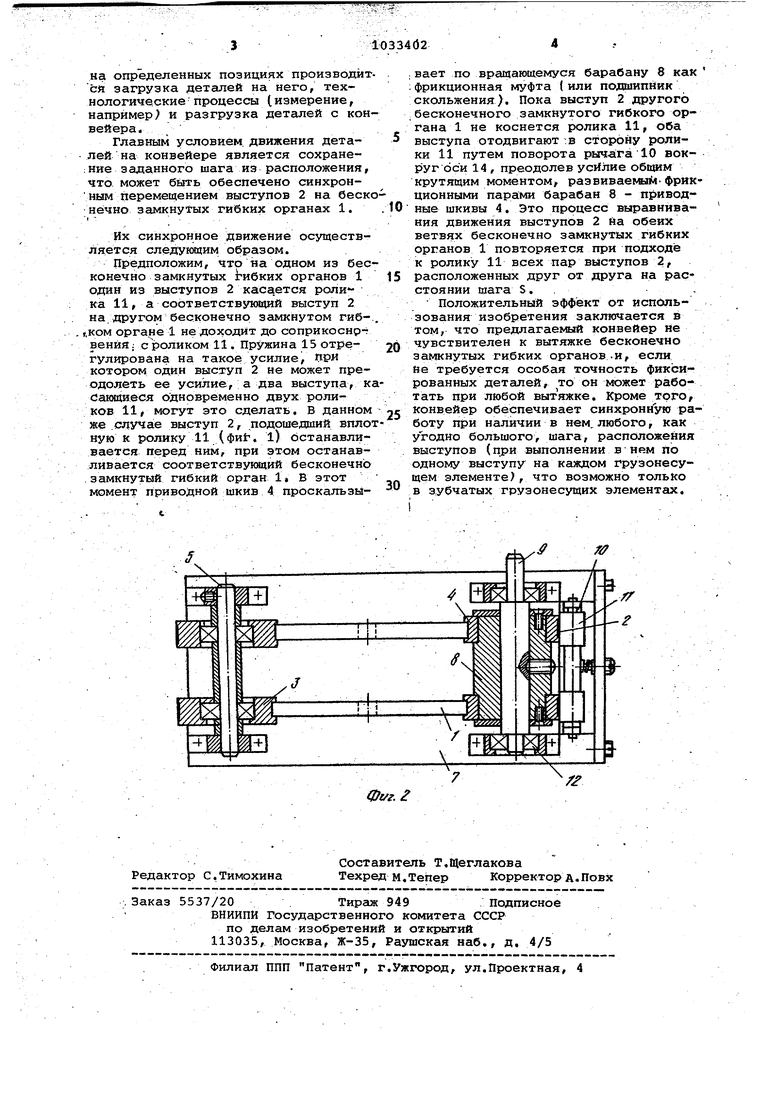
0fff./ Изобретение относится к транспор тирующим устройствам, на которых детали располагаются враскладку (с определенным шагом), и может, быть использовано, например, для транспортирования легких плоских изделий - полупроводникового производ ства, радиотехнической и приборостроительной промышленности. Известен цепно1й конвейер, состоя щий.из двух ветвей втулочно-роликовых цепей, к звеньям которых с опре деленным шагом крепятся грузонерущие элементы, обеспечивающий транспортирование деталей враскладку (с интервалом )l. Недостатком такого устройства является сложность конструкции, большой Beq и габариты. Для транспортирования легких деталей такой конвейер слишком громоздок, а для изделий полупроводниковой промышленности (например, кремниевых плас тин) просто недопустим по условиям обеспечения чистоты и неповреждаемости транспортируемых изделий. Наиболее близКИМ к предлагаемому является конвейер, включающий ведущий валы и бесконечно замкнутые гибкие органы с выступами, огибающие отклоняющие элменты и приводные шкивы с синхронизирующим приспособлением t2. . Недостаток этого конвейера заклю чается в сложности его конструкции обусловленной наличием большого количества направляющих роликов (с валиками, подшипниками и корпусами подшипников). При увеличении шага ,оасположения упоров-фиксаторов на гибком ремне необходимо увеличивать диаметр синхронизирующих шкивов,что увеличивает габариты устройства в целом. Для обеспечения нормальной работы транспортера выетупы-фиксато ры должны попадать в пазы синхронизирующих шкивов, что накладывает повышенные требования к точности р положения фиксаторов на гибком рем не. При возможной вытяжке ремней, когда увеличивается шаг между упор ми , нарушается нормальная работа конвейера из-за неправильного заце ления упоров с паЗ;ами синхронизиру щих шкивов, в результате чего необ ходима замена ремней. Кроме того, конвейер может быть использован ролько в том случае, когда выступо 1 а ленте не менее двух пар. Практи чески же при малом количестве пар BfcicTynoB и большом шаге их располо жения недопустимо увеличивается ди метр синхронизирующих шкивов, что приводит к громоздкости конструкци Если же количество вь1ступов, опред ляемое требованиями технологическо го оборудования, меньше двух, то синхронизация невозможна. Целью изобретения является упрощение конструкции и расширение технологических возможностей конвейера. Поставленная цель достигается тем, что в конвейере, включающем ведущий вал и бесконечно замкнутые гибкие органы с выступами, огибающие отклоняющие элементы и приводные шкивы с синхронизирующим приспособлением, синхронизирующее приспособление вы- . полнено в виде барабана, установленного на ведущем валу, и подпружиненного рычага со свободно вращающимися роликами, при этом шкивы смонтированы на барабане с возможностью вращения, а ролики установлены с возможностью взаимодействия с выступами соответствующего бесконечно замкнутого гибкого органа. На фиг. 1 показан конвейер, общий вид; на фиг. 2 - то же, вид сверху. Конвейер состоит из бесконечно замкнутых гибких органов 1, установленных параллельно друг другу и имекяцих выступы 2. Бесконечно замкнутые гибкие органы 1огибают отклоняющие элементы в виде ведомых шкивов 3 и приводные шкивы 4, имеющие синхронизирующее приспособление. Ведомые шкивы 3 свободно опираются через подшипники качения на неподвижную ось 5, установленную в кронштейнах б , которые крепятся . к 7.- . . Синхронизирующее приспособление выполнено в виде барабана 8, установленного на ведущем валу 9 и в виде подпружиненного рычага 10 со свободно вращающимися роликами 11, которые смонтированы на нем с возможностью взаимодействия с выступами 2. Приводные шкивы 4 свободно посажены на барабан 8, который жестко сззязан с ведущим валом 9, опирающим-, ся через шарикоподшипники 12 на кронштейны 13. Ролики 11 свободно вращаются в рычаге 10, качающемся на оси 14, закрепленной в плите 7. Ролики 11 поджимаются к шкивам 4 пружиной 15, усилие которой регулируется винтом 16. Работа конвейера может осуществляться при непрерывном или шаговым перемещении плоских деталей. Наличие двух ветвей конвейера объясняется необходимостью выполнения определенных технологических процессов. Например, при бесконтактном измерении толщины полупроводниковых пластин датчики размещают сверху и снизу пластины, что приводит к необхог димости перемещения пластины на. двух ветвях транспортера. При применении конвейера с шаговым перемещением в момент его выстоя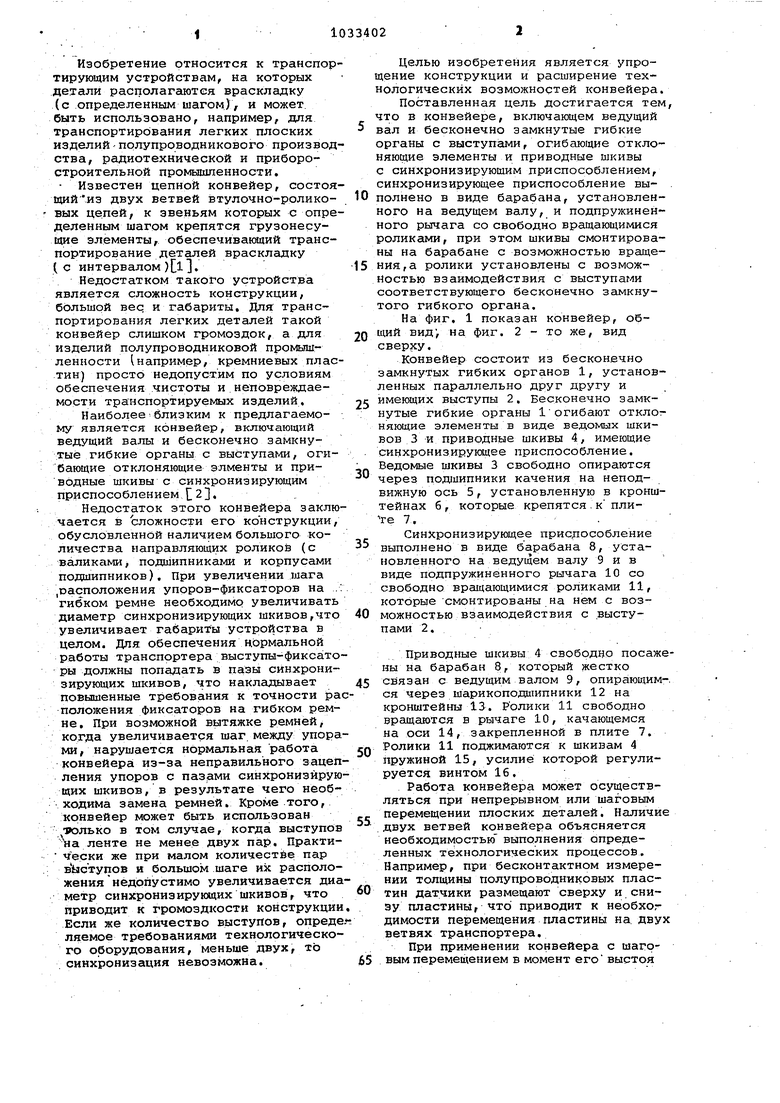
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2004 |
|
RU2258657C1 |
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2004 |
|
RU2258658C1 |
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ И КОМБИНИРОВАННЫМИ ОПОРАМИ | 2005 |
|
RU2294882C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2323866C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2006 |
|
RU2308406C1 |
| ЛЕНТОЧНО-КАНАТНЫЙ КОНВЕЙЕР | 2009 |
|
RU2405727C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2000 |
|
RU2170695C1 |
| Конвейер | 1990 |
|
SU1751100A1 |
| МНОГОПРИВОДНОЙ ЛЕНТОЧНО-КАНАТНЫЙ КОНВЕЙЕР | 2011 |
|
RU2463236C1 |
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ И КОМБИНИРОВАННЫМИ ОПОРАМИ | 2006 |
|
RU2297960C1 |
КОНВЕЙЕР/ включгшзщий ведущий вал и бесконечно замкнутые гибкие органы с выступами, огибакядие отклоняющие элементы и приводные шкивы с синхронизирующим приспособ.лениеМ, отличающийся тем/ что, с целью упрощения конструкции и расширения технологических ;возможностей конвейера синхронизирувхдее приспособление выполнено в виде барабана, установленного на ведущем валу, и подпружиненного рычага со свободно вращакнцимися роликами, при этом шкивы смонтированы на барабане с возможностью вращения, а ролики установлены с возможностью взаимодействия с выступами соответствующего бесконечно замкнутого гибкого органа.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Брон Л.С., Власов С.Н | |||
| и др | |||
| Конструкция и наладка автоматических линий и специальных станков | |||
| М., Высшая школа, 1977, с | |||
| Способ получения морфия из опия | 1922 |
|
SU127A1 |
| Авторское свидетельство СССР по заявке №3003560, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
