(/)
С
&0
4:
з: :о
Изобретение относится к технике измерения и может быть использовано для измерения угла или угловой скорости. В устройствах для измерения углов или угловых скоростей электро ным способом часто используется металлическое колесо с прорезями по его окружности, в котором электрические и1и1пульсы генерируют посредст вом электромагнитного элемента, или колесо, на окружности которого имеются немагнитные участки, равномерно распределенные по этой окружности и отделенные друг от друга ненамагниченными промежутками, где в электромагнитном приспособлении при вращении колеса генерируются электр ческие импульсы. Известно устройство, в котором разделение окружности колеса на намагниченные и- ненамагниченные,участ ки или прорези, в случае использова ния колеса с прорезями по окружности, при вращении которого импульсы генерируются оптическим способом, что позволяет получать точные данн об угловом положении колеса 1. Наиболее близким : к предлагаемо; му по технической сущности является ;измеритель инфранизкочастотных пере ;мещений, содержащий подвижный маятн :ковый рычаг, подвижный и неподвижный растры, источники света и фото элементы 2 3. I Известные устройства не позволяю ;определять относительное направле ние перемещения. L Цель изобретения - определение относительного направления перемещения. Поставленная цель достигается тем, что в устройстве, содержащем, подвижный цилиндрический растр с эксцентрично расположенным грузом, неподвижный растр, источники света и фотоэлементы, неподвижный растр выполнен в виде двух экранов, на одном из которых нанесено меньшее, а на другом - большее число делений на единицу длины, чем на подвижном растре. На фиг. 1 схематически изображено устройство в положении, параллельном оси колеса; на фиг. 2 и 3 то же,в положении, перпендикулярном оси колеса на фиг. 4 - устройство, включающее считываквдее приспособление на фиг. 5 - основная схема сое динений в соответствии с одним из вариантов изобретения; на фиг. б устройство,предназначенное для конт ролирования. УГЛОВОЙ скорости на фиг. 7 - устройство, предназначенное для измерения углов. Устройство содержит колесо 1 с осью 2. Окружность 3 колеса имеет цилиндра, к одной из кромок которого прикреплен колесный центр колеса 1, На внешней поверхности окружности 3 колеса 1 расположена первая часть узла датчика, состоящая из экранов 4, и 5. Параллельно окружности 3 колеса 1 и за ее пределами расположена вторая часть узла датчика, состоящая из одного или нескольких экранов. Устройство содержит .также считывающее устройство, которое состоит из одного или нескольких светоизлучающих диодов б, предназначенных для освещения экранов 4 и 5, и из одного или нескольких фототранзисторов 7 для регис -рирования интерференционных картин, возникающих в то время, когда колесо 1 , а вместе с ним и экран 4 первой части перемещаются относительно экрана 5 второй части. Эти две части, на которых,имеются экраны 4 и 5, а также окружность 3 колеса 1 изготавливаются преимущественно из прозрачной пластмассы. Когда два экрана, состоящие из непрозрачных линий 8, разделенных прозрачными промежутками, перемещаются относительно друг друга, то при визуальном наблюдении первого экрана через второй появляются интерференционные картины, или, так называемые, муаровые картины. В зависимости от конструкции двух экранов можно вызывать появление муаровых картин различных типов. Непрозрачные линии 8, связанные с экраном 4 первой части, расположены параллельно направлению движения окружности 3 колеса 1, а непрозрачные линии 8, связанные с экраном 5 второй части, расположены параллельно линиям 8 экрана первой части. Когда колесо 1, а вместе с ним и первый экран 4, поворачивае ся или вращается и, тем самым, пере мещаясь перпендикулярно экранным линиям 8 на втором экране 5, то при визуальном наблюдении первого экрана 4 через второй экран 5 возникает интерференционная картина, состоящая их перемещающихся широких темных полос 9 (фиг. 2). Экраны выполнены таким образом, что экран 4 первой части имеет число делений непрозрачных линий 8 на единицу длины, перпендикулярных линиям 8, которое отлично от числа делений экрана 5 второй части. Это различие в разделении достигается преимущественно тем, что непрозрачные экранные линии 8 на двух частях имеют одинаковую ширину, и тем, что ширина светлых или прозрачных линий на экране 4 первой части отлична от ширины линий на экране во второй части. Ширина непрозрачных линий 8, а также Аирина светлых или прозрачных линий на экране 4
первой части отлична от ширины лини экрана 5 второй части.
Кроме того, экраны 4 и 5 выполнены таким обраэом, что для каждого экрана светлые или прозрачные линии имеют меньшую ширину, чем непрозрачные линии. В результате этого возникают отчетливые интерференционные картины. Если светлые или прозрачные линии имеют одинаковую ширину с йепроэрачньши линиями или шире этих непрозрачных линий, то возникает Сравнительно нерезкая интерференционная картина, что делает оптическое считывание менее точным.
Направление перемещения широких полос 9 зависит от того, какой из двухэкранов 4 и 5 имеет более плотное разделение. На фиг. 2 показан в виде примера вариант, в котором экран 5 второй части может иметь большее число непрозрачных линий на единицу длины,- перпендикулярных линиям 8, чем экран 4 первой части. В результате этого широкие полосы 9 перемещаются в направлении указанном стрелкой 10, когда колесо поворачивается в направлении, указанном стрелками И к 12.
Когда экраны 4 и 5 первой и второй частей имеют различное разделение, широкие полосы 9 будут перемещаться на расстояние большее, чем то расстояние, на которое переместилась окружность 3 колеса 1.
Таким образом, получают соотношение между расстоянием, на которое переместилась окружность 3 колеса 1 и расстоянием перемещения полос 9. Следовательно, перемещение окружности 3 колеса 1 можно считывать более точно с помощью перемещения полос 9, чем считывая его непосредственно с окружности 3 колеса 1.
Для того, чтобы получить более высокое соотношение, т.е. когда для определенного перемещения окружности колеса 1 через точку на экране 5 проходит большое число широких полос 9, различие в разделении на . полосы между экранами 4 и 5 двух частей должно быть небольшим. Когда, например, непрозрачные линии 8 на экранах 4 и 5 двух частей имеют одинаковую ширину, например 0,6 мм, а промежуточные светлые или прозрач|Ные линии имеют на одном экране ширину 0,5 мм, а на втором экране 0,3 мм, получают соотношение величин порядка 10, т.е. широкие полосы перемещаются по экранам 4 и 5 на расстояние, которое в 10 раз Длиннее того расстояния, на которое передвинулась окружность 3. Этот пример доказывает, что с помощью устройства можно получить значительно большую точность при измерении движения окружности 3 колеса 1, чем
тогда, когда измерение производится непосредственно по окружности колеса.
Как ужа отмечалось, интерференционная картина считывается с помощью одного или более светоизлучгиощих диодов 6 и фототранзистора 7,
В случае, когда первая и вторая части состоят только из одного экрана, используются один светоиЭлучающий диод 6 и один фототранзис-
0 тор 7.
I В соответствиии с первыл sapHjaHтом изобретения на экране 4 первой части датчика, установленной на окружности 3 колеса 1, прозрачные ли5нии располагаются между непрозрачными линиями 8. Окружность 3 колеса J, выполнена из непрозрачного материала.
В данном случае светоизлучакхций диод 6 или светоизлучающие диоды ,
0 если на одной или на обеих частях
4и 5 узла датчика имеется несколько экранов , устанавливаются между окружностью 3 колеса 1 и его осью (фиг. 1). Фототранзистор 7
5 или фототранзистоЕял, если на одной или на обеих частях 4 и 5 узла датчика имеется несколько экранов,:., устанавливаются на той же стороне экрана 5 второй части, которая об0раццена наружу от колеса 1 (фиг.1). Светоизлучающий диод или светоизлучающие диоды могут быть установлены там, где находится фототранзистор 7 или фототранзисторы, в соответствии
5 с вышеизложенным, и наоборот. Как видно из фиг. 1 экран 5 второй части перекрывает экран 4 первой части по длине, которс1Я значительно короче окружности колеса 1.
0
Лучи света от светоизлучающего диода б, таким образом, проходя через прозрачную окружность 3 колеса 1 и экран 4, установленный на ней, и через экран 5 второй части
5 узла датчика, после чего лучи света встречают на своем пути фототранзистор 7.
В соответствии со вторым вариантом изобретения, экран 4 первой
0 части имеет светлые, но непрозрач пые, линии, расположенные между . непрозрачными линиями 8, в то бремя как экран 5 второй части имеет прозрачные линии, расположенные
5 между непрозрачными линиями 8. Светоизлучающий диод 6 и фототранзистор 7 расположены на той стороне экрана
5второй части, которая обращена наружу от колеса 1. Лучи света от свё0тризлучающего диода 6 в этом случае пЪоходят через экран 5 второй части, отражаются экраном 4 первой части
и пропускаются через экран 5 второй части, чтобы встретиться с фототран-зистором 7.
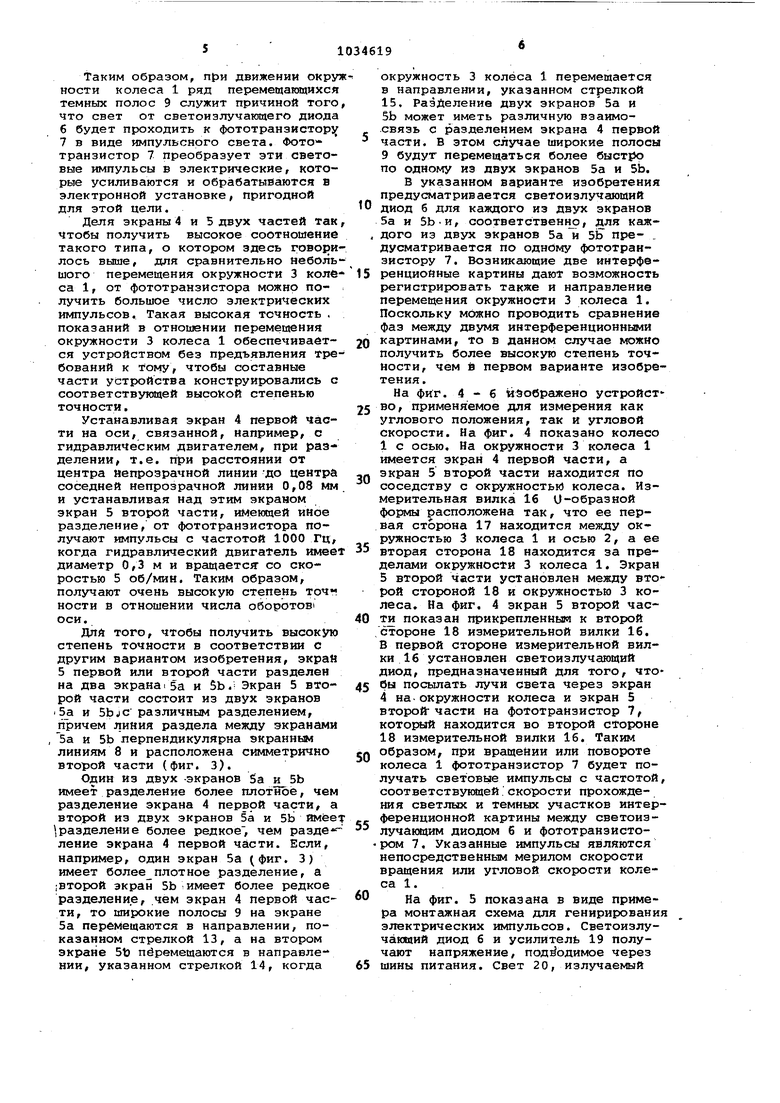
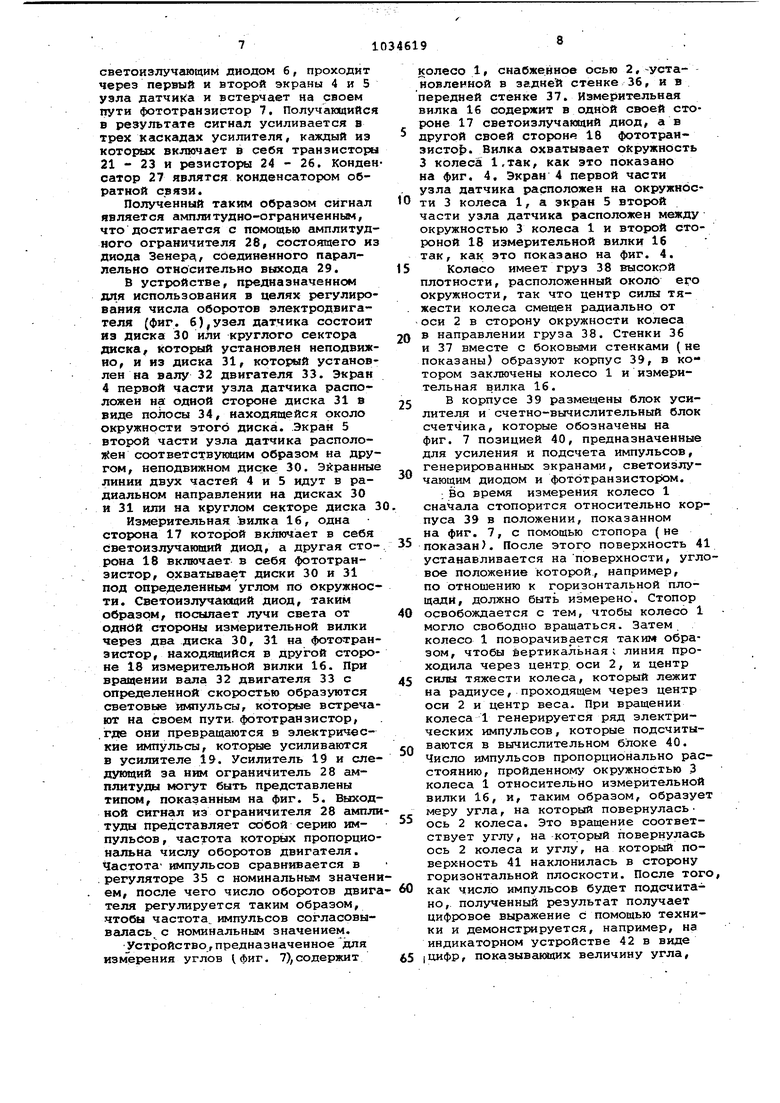
5 Таким образом, п{зи движении окру ности колеса 1 ряд перемещающихся темных полос 9 служит причиной того что свет от светомэлучакицего диода 6будет прюходить к фототранэистор5 7в виде импульсного света. Фототранзистор 7 преобразует эти световые импульсы в электрические, которые усиливаются и обрабатываются в электронной установке, пригодной для этой цели. Деля экраны 4 и 5 двух частей так чтобы получить высокое соотношение такого типа, о котором здесь гово1)и лось выше, для сравнительно неболь шого перемещения окружности 3 коле са 1 , от фототранзистора можно получить большое число электрических импульсов. Такая высокая точность . показаний в отношении перемещения окружности 3 колеса 1 обеспечивается устройством без предъявления тре бований к тому, чтобы составные части устройства конструировались с соответствующей высокой степенью точности. Устанавливая экран 4 первой части на оси, связанной, например, с гидравлическим двигателем, при разделении, т.е. при расстоянии от центра непрозрачной линии -до центра соседней непрозрачной линии 0,08 мм и устанавливая над этим экраном экран 5 второй части, имеющей иное разделение, от фототранэистора получают импульсы с частотой 1000 Гц, когда гидравлический двигатель имее диаметр О,3 м и вращается со скоростью 5 об/мин. Таким образом, получают очень высокую степень трч ности в отношении числа оборотов оси. Дли того, чтобы получить высокую степень точности в соответствии с другим вариантом изобретения, экран 5 первой или второй части разделен на два экрана 5а и 5Ь.- Экран 5 второй части состоит из двух экранов 5а и 5bjс различным разделением, причем линия раздела между экранами , 5а и 5Ь перпендикулярна экранным линиям 8 и расположена симметрично второй части (фиг. 3). Один из двух -экранов 5а и 5Ь имеет разделение более плотТюё, чем разделение экрана 4 первой части, а второй из двух экранов 5а и 5Ь имее разделение более редкое, чем разде ление экрана 4 первой части. Если, например, один экран 5а (фиг. 3) имеет более плотное разделение, а Второй экран 5Ь имеет более редкое разделение, чем экран 4 первой части, то широкие полосы 9 на экране 5а перемещаются в направлении, показанном стрелкой 13, а на втором экране 5t) перемещаются в направлении, указанном стрелкой 14, когда окружность 3 колёса 1 перемещается в направлении, указанном стрелкой 15. Разделение двух экранов5а и 5Ь может иметь различную взаимосвязь с разделением экрана 4 первой части. В этом случае широкие полосы 9 будут перемещаться более быст1 о по одному из двух экранов 5а и 5Ь. В указанном варианте изобретения предусматривается светоизлучающий диод б для каждого из двух экранов 5а и , соответственно, для каждого из двух экранов 5а и 5Ь предусматривается по одному фототранзистору 7. Возникающие две интерференционные картины дают возможность регистрировать также и направление перемещения окружности 3 колеса 1. Поскольку можно проводить сравнение фаз между лрумя интерференционными картинами, то в данном случае можно получить более высокую степень точности, чем и первом варианте изобретения. На фиг. 4-6 изображено устройство, применяемое для измерения как углового положения, так и угловой скорости. На фиг. 4 показано колесо 1 с осью. На окружности 3 колеса 1 имеется экран 4 первой части, а экран 5 второй части находится по соседству с окружностью колеса. Измерительная вилка 16 О-образной формы расположена так, что ее первая сторона 17 находится между окружностью 3 колеса 1 и осью 2, а ее вторая сторона 18 находится за пределами окружности 3 колеса 1. Экран 5 второй части установлен между второй стороной 18 и окружностью 3 колеса. На фиг. 4 экран 5 второй части показан прикрепленным к второй стороне 18 измерительной вилки 16. В первой стороне измерительной вилки 16 установлен светоизлучающий диод, предназначенный для того, чтобы посылать лучи света через экран 4 на-окружности колеса и экран 5 второй- части на фототранзистор 7, которалй находится во второй стороне 18 измерительной вилки 16. Таким образом, при вращейии или повороте колеса 1 фототранзистор 7 будет получать световые импульсы с частотой, соответствукяцей скорости прохождения светлых и темных участков интерференционной картины между светоизлучаняцим диодом 6 и фототранзистором 7. Указанные импульсы являются непосредственным мерилом скорости вращения или угловой скорости колеса 1 . На фиг. 5 показана в виде примера монтажная схема для генирирования электрических импульсов. Светоизлучающий диод б и усилитель 19 получают напряжение, подводимое через шины питания. Свет 20, излучаемый светоизлучающим диодом б, проходит через первый и второй экраны 4 и 5 узла датчика и встерчает на своем пути фототранзистор 7. Получающийс в результате сигнал усиливается в трех каскадах усилителя, каждый из которых включает в себя транзисторы 21 - 23 и резисторы 24 - 26. Конде сатор 27 являтся конденсатором обратной связи. Полученный таким образом сигнал является амплитудно-ограниченным, что достигается с помощью амплитуд ного ограничителя 28, состоящего и диода Зенера, соединенного параллельно относительно выхода 29. В устройстве, предназначенном для использования в целях регулиро вания числа оборотов электродвигателя (фиг. 6),узел датчика состоит из диска 30 или круглого сектора диска, который установлен неподвиж но, и из диска 31, который установ лен на валу 32 двигателя 33. Экран 4 первой части узла датчика расположен на одной стороне диска 31 в виде полосы 34, находящейся около окружности этого диска. Экран 5 второй части узла датчика располо«ен соответствующим образом на дру гом, неподвижном диске 30. Экранны линии двух частей 4 и 5 идут в радиальном направлении на дисках 30 и 31 или на круглом секторе диска Измерительная .вилка 16, одна сторона 17 которой включает в себя светоизлучающий диод, а другая сторона 18 включает в себя фототранзистор, охватывает диски 30 и 31 под опре деленным углом по окружнос ти. Светоизлучающий диод, таким образом, посылает лучи света от ОДНОЙ стороны измерительной вилки через два диска 30, 31 на фототран зистор, находящийся в другой сторо не 18 измерительной вилки 16. При вращении вала 32 двигателя 33 с определенной скоростью образуются световые иьшульсы, встреча ют на своем пути, фототранзистор, .где они превращаются в электрические импульсы, которые усиливаются в усилителе 19. Усилитель 19 и сле дующий за ним ограничитель 28 амплитуды могут быть представлены типом, показанным на фиг. 5. Выходной сигнал из ограничителя 28 ампли туды представляет собой серию импульсов, частота которых пропорциоНсШьНа числу оборотов двигателя. Частота импульсов сравнивается в . регуляторе 35 с номинальньм значени ем, после чего число оборотов двига теля регулируется таким образом, чтобы частота, импульсов согласовывалась с номинальным значением. Устройство,предназначенное для измерения углов фиг. 7), содержит колесо 1, снабженное осью 2,-установленной в задней стенке 36, и в передней стенке 37. Измерительная вилка 16 содержит в однЬй своей стороне 17 светоизлучающий диод, а в другой своей стороне 18 фототраизисто|. Вилка охватывает окружность 3 колеса 1,так, как это показано на фиг. 4. Экран 4 первой части узла датчика расположен на окружности 3 колеса 1, а экран 5 второй части узла датчика расположен между окружностью 3 колеса 1 и второй стороной 18 измерительной вилки 16 так, как это показано на фиг. 4. Колесо имеет груз 38 высокрй плотности, расположенный около его окружности, так что центр силы тяжести колеса смещен радиально от оси 2 в сторону окружности колеса в направлении груза 38. Стенки 36 и 37 вместе с боковыми стенками (не показаны) образуют корпус 39, в котором заключены колесо 1 и измерительная вилка 16. В корпусе 39 размещены блок усилителя и счетно-вычислительный блок счетчика, которые обозначены на фиг. 7 позицией 40, предназначенные для усиления и подсчета импульсов, генерированных экранами, светоизлучающим диодом и фот6транзистор ом. ; Во время измерения колесо 1 сначала стопорится относительно корпуса 39 в положении, показанном на фиг. 7, с помощью стопора (не показан). После этого поверхность 41 устанавливается на поверхности, угловое положение которой, например, по отношению к горизонтальной площади, должно быть измерено. Стопор освобождается с тем, чтобы колесо 1 могло свободно вращаться. Затем колесо 1 поворачивается таким образом, чтобы вертикальная линия проходила через центр, оси 2, и центр силы тяжести колеса, который лежит на радиусе, проходящем через центр оси 2 и центр веса. При вращении колеса 1 генерируется ряд электрических импульсов, которые подсчитываются в вычислительном блоке 40. Число импульсов пропорционально расстоянию, пройденному окружностью 3 колеса 1 относительно измерительной вилки 16, и, таким образом, образует меру угла, на который повернулась ось 2 колеса. Это вращение соответствует углу, на который повернулась ось 2 колеса и углу, на который поверхность 41 наклонилась в сторону горизонтальной плоскости. После того, как число импульсов будет подсчитано,, полученный результат получает цифровое выражение с помощью техники и демонстрируется, например, на индикаторном устройстве 42 в виде Цифр, показывакяцих величину угла.
на который поверхность 41 наклонилась к горизонтальной плоскости.
При измерении угла с помощью предлагаемого устройства преимущественно используются такие экраны, у которых экран второй части узла датчика состоит из двух экранов 5а и 5bi как это показано на фиг. 3, благТШаря чему може быть оценено направление вращения колеса 1, а возможное качание колеса относительно положения равновесия может быть компенсировано с помощью вычислительного блока. Измерительная вилка 16 состоит из двух еветоизлучающих диодов и двух фототранзисторов, а блок 40 усиления и вычисления включа ет J3 себя известное электронное
оборудование, с помощью которого производится указанная оценка. Кроме Tord в варианте изобретения, предназначенного для измерения угловой скорости экран 5 второй части можетсостоять-из двух экранов 5а и 5Ь чтобы иметь возможность оцекиBatb направление вращения колеса 1.
Как ,уже отмечалось, с помощью двух экранов 5а и 5Ь во второй части узла датчика можно получить более высокую степень точности в отношении измерения определенного угла вращения. Позтсялу во всех варианtax изобретения, о которых говорилось выше, может быть палезньж использс5ваиие такого узла датчика.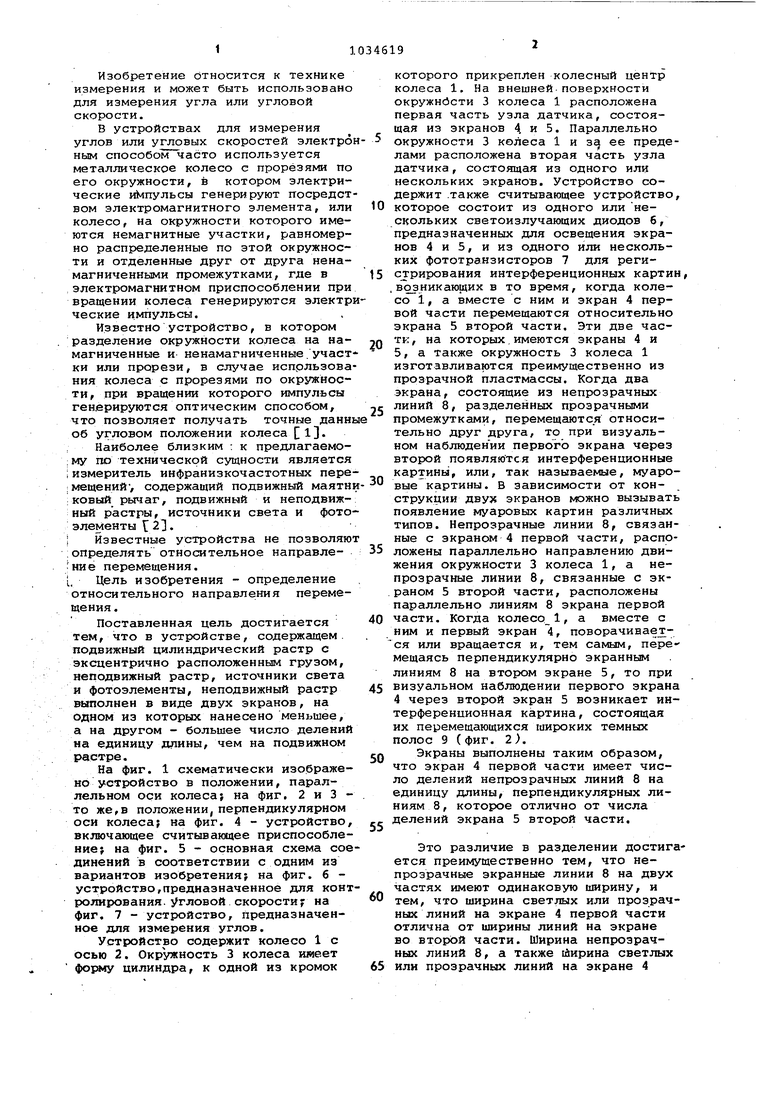

| название | год | авторы | номер документа |
|---|---|---|---|
| Рулетка | 1977 |
|
SU955879A3 |
| Устройство для сборки экранно-масочного узла цветной электронно-лучевой трубки | 1989 |
|
SU1707650A1 |
| Устройство для визуальной индикации положения объекта | 1983 |
|
SU1200859A3 |
| Устройство для определения направления для наблюдателя | 1982 |
|
SU1327800A3 |
| Радиотехническая система посадки самолета | 1976 |
|
SU728735A3 |
| КОМПАРАТОР ДЛЯ ЛИНЕЙНОГО ИЗМЕРЕНИЯ КОНЦЕВЫХ | 1973 |
|
SU382917A1 |
| Измеритель степени видимости | 1988 |
|
SU1578552A1 |
| ЗАЩИЩЕННОЕ ИЗДЕЛИЕ, СОДЕРЖАЩЕЕ ВЫЯВЛЯЮЩИЙ РАСТР И КОМБИНИРОВАННОЕ ИЗОБРАЖЕНИЕ | 2016 |
|
RU2731962C2 |
| СПОСОБ АУТЕНТИФИКАЦИИ И/ИЛИ ИДЕНТИФИКАЦИИ ЗАЩИЩЕННОГО ИЗДЕЛИЯ | 2011 |
|
RU2566261C2 |
| Интерференционное устройство для контроля децентрировки линзы | 1987 |
|
SU1497450A1 |

УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ИЛИ УГЛОВОЙ СКОРОСТИ,.содержащее подв1€жньй цилиндрический растр с эксцентрично расположенным грузом непрдвижный растр, источники света 1и фотоэлементы, отличающе - е с я тем, что, с целью определения относительного направления перемещения , неподвижный растр выполнен в виде двух экранов, на одном из которых нанесено меньшее, а на дру:гом - большее число делений на единицу длины, чем на подвижном растреI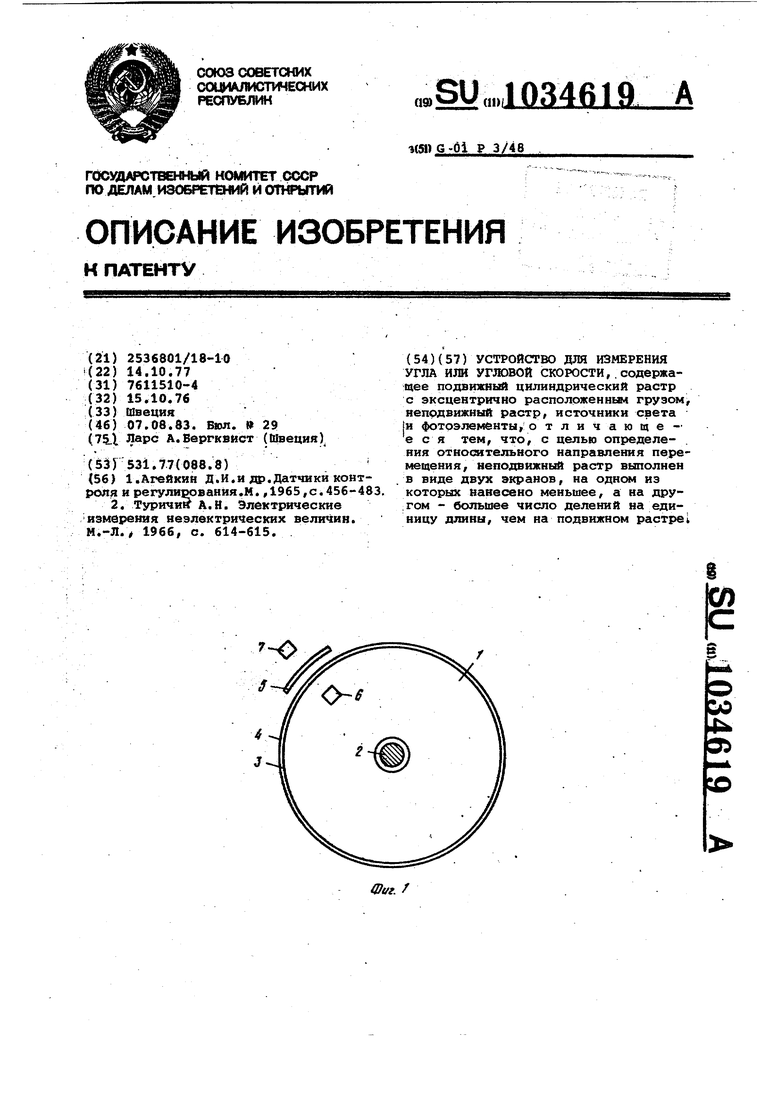
tt IS
Г
-a
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Туричи А.Н | |||
| Электрические Измерения неэлектрических величин | |||
| М.-Л | |||
| Двухтактный двигатель внутреннего горения | 1924 |
|
SU1966A1 |
| ПРИСПОСОБЛЕНИЕ К ВЕЛОСИПЕДУ ДЛЯ ЕЗДЫ ПО ОДНОМУ РЕЛЬСУ | 1922 |
|
SU614A1 |
