Изофетение о-пюсктся к способам распознавания объектов по их двуХуро&невому графическому изображению, в частности к способам автоматическогрг приведения изображений к ствнаартизиро ванному виду, и может быть использова в читающих автоматах и технических зр тельных системах роботов. Нормирование изображений резко снижает избыточноста, вводимой информации придает изображениям символов устойчивость на сетчатке. В резупьтате JK мирования,исчезают несущественные различия между объектами одного класса, но сохранятся различия между обьект€1мн разных классов. Изображения рукопечатных символов отличаются размерами по горизонтали и вертикали, положением на сетчатке, наклоном, -толщиной линии. ПризнакИ5 -которые используются в процессе распознавания, также зависят от этих параметров нормирования. Нормализация устраняет эту завися мость, что позволяет сократить исходное пространство описания и повьгсить надежность распознавания, Известны способы нормализации изоб ражений, основанные на считывании изоб ражения сканером или матрицей фотодиодов, дискриминации видеосигналов, запом шании изображения в запоминающе устройстве, пересчете геометрических характеристик и интерполяции изображения в процессорном устройстве. Наиболее близким по технической сущ ности к предлагаемому является метод, основанный на сканировании изображения объекта световым лучом, формировании сигналов считывания и преобразовании их в сигналы-управления перемещением элементов изображения, формировании первой последовательности опорных сигналов сканирования изображения объектов световым лучом. Для безошибочного фзгнкционирования распознающих автоматбв необходимо, что бы все объекты одного класса нормиро- вали одинаково {требование внутршслассо вой устойчивости при нормировании). Однако известные методы не обеспечивают этого требования. Вычисляемый угол поворота зависит от формы написания символа. Целью изобретения 51вляется увеличения точности нормализации. Поставленная цель достигается тем, что согласно способу нормализации, оскованному на сканировании изображения объекта световым лучом, фо1 лировании сигналов считывания изображения, формировании и преобразовании mi в сигналы управления перемещением элементов изображения, фoJЯ иpoвaнии первой последовательностга опорных сигналов сканирования, формируют вторую последовательность опорных сигналов сканирования путем задержки первой последовательности на заданный интервал, изменяют амплитуды сигналов первой и второй последовательности опорных сигналов ск 1нирования по линейному закону, сравнивают периоды опорныхсигналов считывания и при неравенстве их периодов изменяют положение элементов изображения, повторя-. ют указанные операции до равенства периодов сигналов считывания с периодами последовательностей опорных сигналов сканирования. На фиг. 1 показан процесс центрирования изображения по горизонтали: аизображение объекта и последовательности опорных сигналов сканирования; б - видеосигнал; в - сформированный с 1гнвл считывания; г - опорный сигнал сканирования по горизонтали; на фиг. 2 - процесс нормализации изображения по углу наклона: а - изображение объекта и последовательности опорных сигналов сканирования; б - видеосигнал:, в -сформированный сигнал считывания; г - опорный сигнал сканирования по вертикали. Пунктиром показаны сигналы, появление которък приводит к окончанию нормализации. На каждом шаге нормирования поле зрения сканируют по траектории, определяемой первой и второй последовательностью опорных сигналов сканирования; формируют сигнал сштывания, запоминая информацию о прохождении каждой из сторон траектории через изображение объекта (фиг, 1а), сравнивают периоды сформированных сигналов считывания и периоды опорных сигналов сканирования (фиг, 1в), по этим величинам производят наменение формы и ориентации элементов растра относительно изофажения в ситуации, когда заняты одна или две левых ctDpoHbi растра, а первые свободны: пе- риоды сигналов не совпадают с периодами опорных сигналов сканирования - производят сдвиг элементов растра влево-, аналогично производят сдвиги вправо, вверх и вниз (фиг, 1а). В ситуации, когда свободны все вертикальные стороны растра, производят уменьшение размера
растра по гориаонтали по линейному закону, если свободны все горизонтальные стороны растра, то производят уменьше - )л(е растра по вертикали.
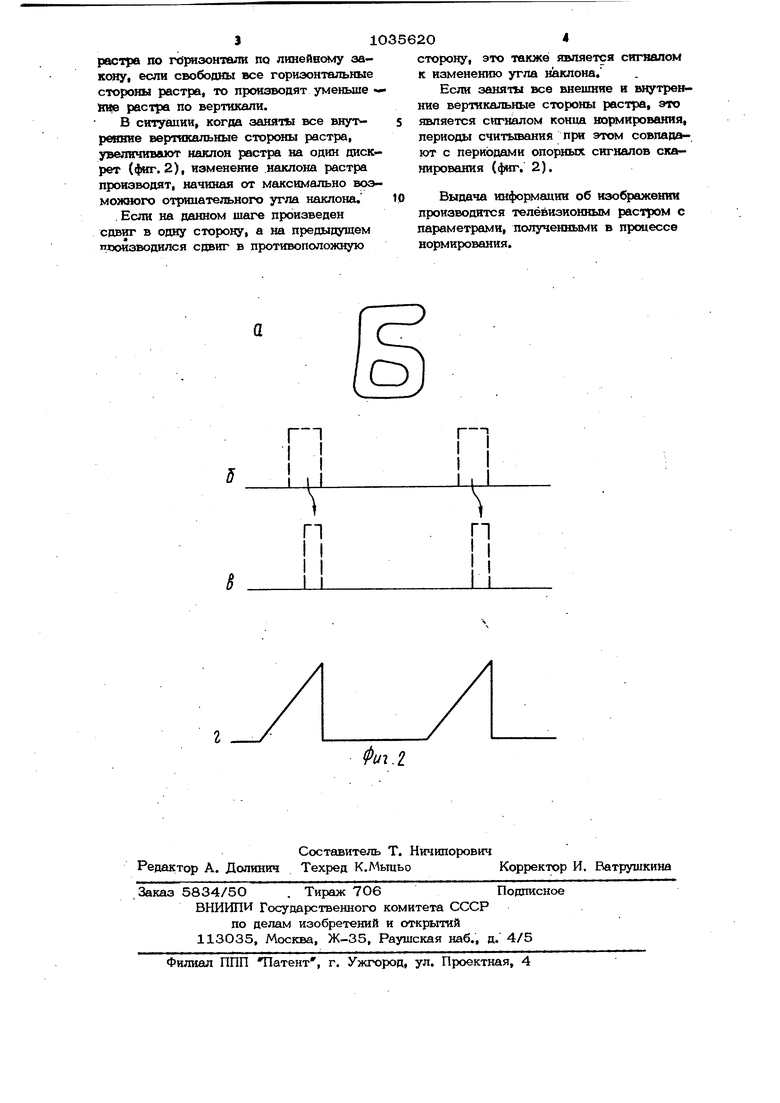
В ситуации, когда заняты все внутpefRHHe вертикальные стороны растра, увеличивают наклон растра на один дискрет (фиг. 2), изменение наклона растра производят, начиная от максимально возможного отрицательного угла наклона.
. Если на данном шаге произведен сдвиг в одну сторону, а на предыдущем пххжзводился сдвиг в противоположную
сторону, это также является сигналом к изменению угла наклона.
Если заняты все внешние и внутренние вертикальные стороны растра, это является сигналом конца нормирования, периоды считывания при этом совпадают с периодами опорных сигналов сканирования (фиг, 2).
Выдача информации об изображении производится телевизионным растром с параметрами, полученными в процессе нормирования.
СПОСОБ НОРМАЛИЗАЦИИ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ, основанный на сканировании иаофажения объекте световым лучом, формировании сигналов считывания и преобразовании их в сигналы управления перемещешем элементов изображение, формировшин первой последсжательности опсфных сигналов сканиро ; вания, отличающийся тем, что, с целью повышения точности нормализации, формируют вторую послед(ательность опорных сигналов сканирования путем задержки первой последовательности яа заданный интервал, изменяют амплитуды сигналов пе{жой и второй последовательности опорных сигналов сканирования по линейному закону, сравнивают периоды опорных сигналЬв считывания и при неравенстве из периодов изметшют положение элементов изо эажения, повторяют указанные операции до равенства периодов сигналов считывания .с периояами последовательностей опорных сигналов сканирования. , ILO
а
I-1
Фи-1.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Анисймов Б | |||
| В., Злобил В | |||
| К | |||
| Разработка и методика моделирования на ЭЦВМ некоторых алгоритмоь норма лкзаиии плоских изображений | |||
| Автомати-ческое управление и вычислительная техника, вып | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
