Изобретение относится к подъемнотранспортным устройствам лесозаготовительных машин, а именно к подвескам челюстных захватов манипуляторов для трелевки стволов деревьев, и может быть использовано в лесной промышленности.
Известна подвеска челюстного захвата к стреле,преимущественно манипулятора, содержащая поворотный механизм, ориентирующий захват относительно стрелы посредством тягового каната, и шарнир для крепления захвата Ci 3Недостатком является то, что присоединение тягового каната, iразнесенного в виде петли, к серединам челю стей захвата, вполне удовлетворитель но функцирнирующее при т.ранспортировании приподнятого пакета деревьев, практически невозможно использовать при работе захвата на трелевке древесины. В этом случае одна из разнесенных ветвей каната укладывается сверху дерева, поэтому при опускании захвата на его конец и несовпадении оси стрелы с осью подтаскиваемого хлыста мешает надежному зажатию дерева захватом. Цепляясь за препятствия пути, разнесенные ветви каната мешают и трелевке дерева..Кроме того, при выдвижении стрелы и подвешенного к ее концу захвата в лесосеку для трелевки следующего дерева , разматываясь с барабана лебёд| й с некоторым сопротивлением, повора чивает захват вокруг горизонтальной оси подвеса нижними концами челюстей в сторону трактора. Так повернутый захват практически невозможно надеть на конец подтягиваемого дерева.
Целью изобретения является повышение надежности в работе путем облегчения установки захвата а рабочее положение.
Указанная цель достигается тем, что подвеска челюстного захвата к стреле, преимущественно манипулятора, содержащая поворотный меха низм, ориентирующий захват относительно стрелы посредством тягового каната, и шарнир для крепления захвата, снабжена шарнирно закрепленной на стреле верхним концом йертикальной тягой и соединенным с тяговым к анатом управляющим рычагом, жестко соединенИь(м с тягой, а шарнир для крепления захвата закреплен на нижнем конце тяги.
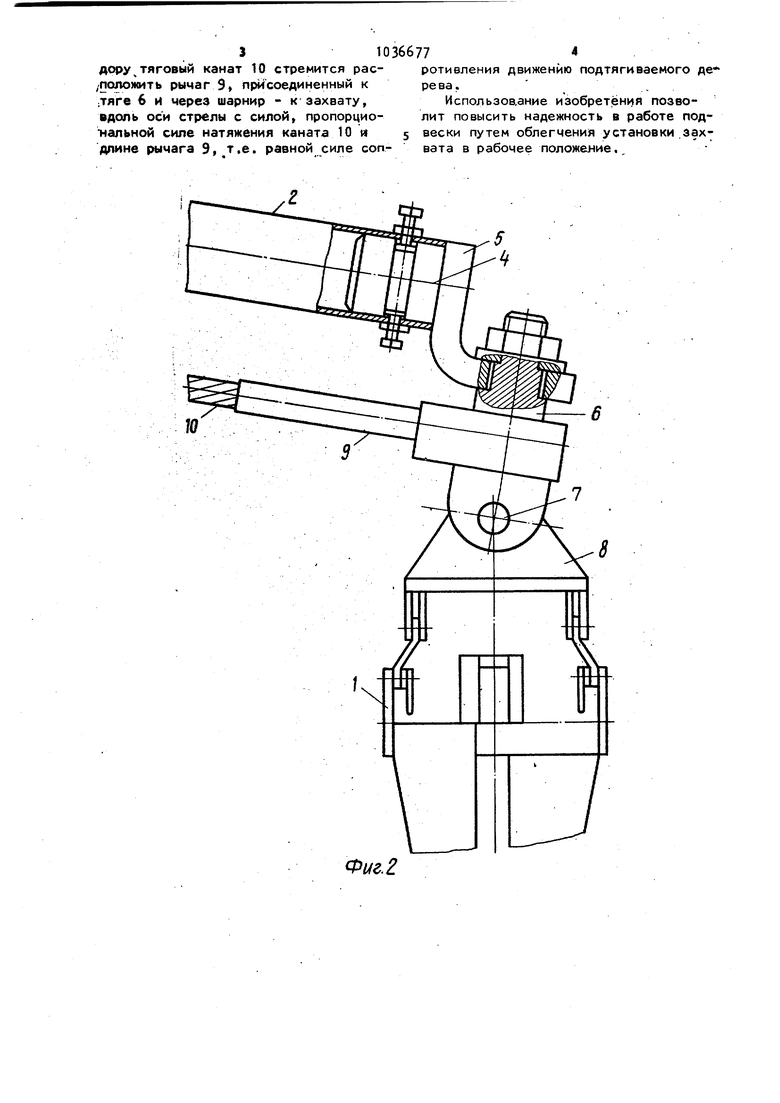
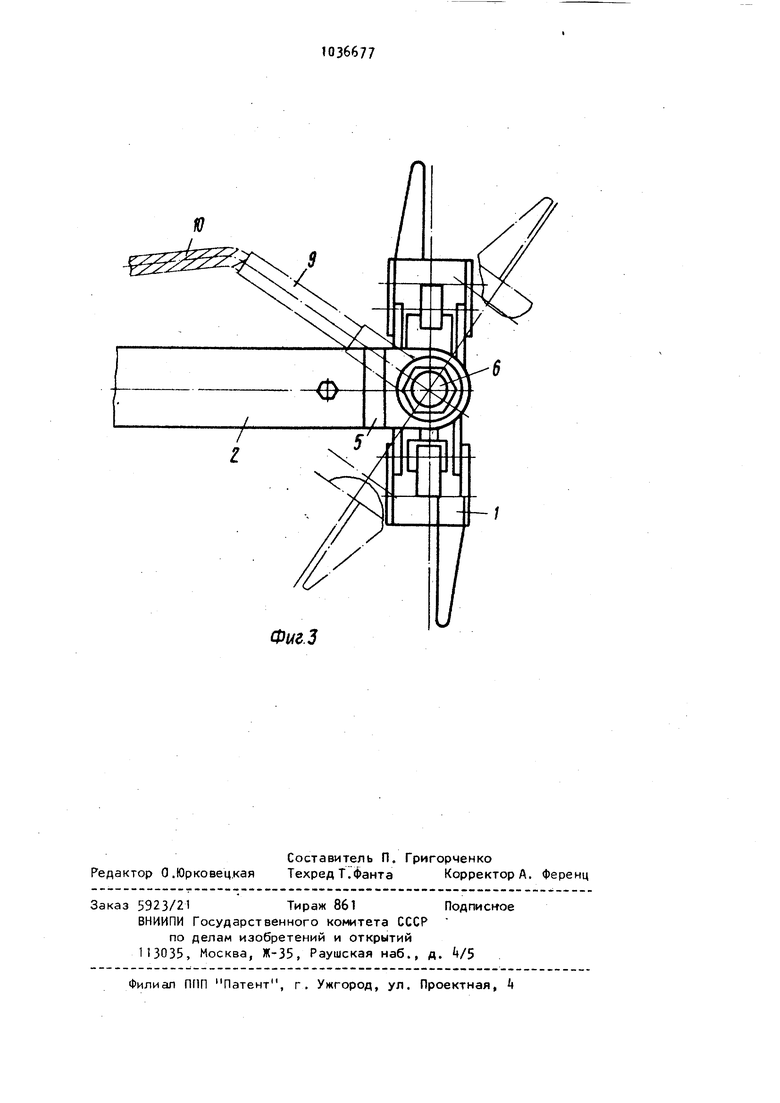
На фиг.1 показан манипулятор с телескопической стрелой, на конце которой расположен захват, общий вид; на фиг. 2 - подвеска захвата, вид сбку; на фиг. 3 - механизм поворота, захвата, вид сверху.
Подвеска захвата 1 к стреле 2 телескопического манипулятора 3 содержит шарнир 4 поворота кронштейна 5 подвески вокруг оси. стрелы 2. В кронштейне 5 подвески поворачивается тяга 6, которая посредством оси 7 соединена с проушинами 8 захвата 1 .С тягой 6 жестко соединен рычаг 9 к которому в свою очередь присоединен тяговый канат 10. ,
Подвеска работает следующим образом.
Для трелевки дерева из засеки несплошной рубки до технологического коридора и последующей укладки его в пакет оператор выдвигает секции телескопической стрелы 2 манипулятора 3 с захватом 1 в сторону подтаскиваемого дерева. Челюсти захвата 1 при этом замкнуты,с целью снижения его габаритов и меньшего задевания за стоящие деревья. Челюсти выдвинутого на достаточное для досягаемости подтягиваемого дерева расстояние захвата 1 раскрываются и конец стрелы с захватом опускается на конец дерева.
Причем выдвигаемый захват 1 вследствие некоторого сопротивления движению разматываемого с лебедки тягового каната 10, соединенного с рычагом 9 поворота тяги 6, и под дейсТвием собственного веса постоянно стремится занять такое положение, кргда плоскость раскрытия его челюстей пер пендикулярна к проекции на опорную поверхность продольной оси стрелы. При задевании во время выдвижения одной из сторон захвата 1 за препятствия и повороте захвата в рычаге 9 и шарнире i создаются усилия, стремящиеся по вернуть захват в исходное положение сразу же после потери контакта с препятствием.
Челюсти опущенного на конец дерева захвата 1 посредством гидроцилиндра замыкаются, включается лебедка, и канат 10, наматываясь на ее барабан, подтягивает присоединенный к ней через ось 7 шарнира захват 1 с зажатым в нем деревом.При подтягивании дерева к технологическому коридору тяговый канат 10 стремится рас/попожить рычаг 9 присоединенный к ;Тяге 6 и через шарнир - к захвату, вдоль оси стрелы с силой, пропорциональной силе натяжения каната 10 и дпине рычага 9,т,е. равной силе сопротивления движению подтягиваемого дерева.
Использов.ание изобретения позволит повысить надежность в работе подвески путем облегчения установки .захвата в рабочее положеяие.
Ю
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для трелевки деревьев | 1981 |
|
SU983028A1 |
| Устройство для захвата и трелевки деревьев | 1990 |
|
SU1757933A1 |
| Устройство для захвата и трелевки деревьев | 1987 |
|
SU1404386A1 |
| Стрела подтрелевочного агрегата для несплошных рубок | 1977 |
|
SU692593A1 |
| Навесное оборудование для бесчокерной трелевки леса | 1986 |
|
SU1393687A1 |
| Устройство для трелевки деревьев | 1979 |
|
SU786945A1 |
| Манипулятор лесозаготовительной машины | 1985 |
|
SU1324995A1 |
| Машина для бесчокерной трелевки деревьев в полуподвешенном состоянии | 1981 |
|
SU948713A1 |
| МАШИНА ДЛЯ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1992 |
|
RU2061604C1 |
| Машина для бесчокерной трелевки леса | 1984 |
|
SU1229090A2 |
ПОДВЕСКА ЧЕЛЮСТНОГО ЗАХВАТА К СТРЕЛЕ, преимущественно манипулятора, содержащая поворотный механизм, ориентирующий захват относительно стрелы посредством тягового каната, и шарнир для крепления захвата, отли чающаяся тем,что, с целью повышения надежности в работе путем облегчения установки захвата в рабочее положение, она снабжена шарнирно закрепленной на стреле верхним концом вертикальной тягой и соединенным с тяговым канатом управляющим рычагом, жестко соединенным с тягой, а шарнир для Крепления захвата закреплен на нижнем конце тяги.
