и второй фоторезистивные делители и механически связанные электродвигатель и кулачковый электрокоитактный механизм, первый и второй выходы которого соединены с. входами соответст вующих фоторезистивных делителей, выходами подсоединенных с соответствующими выходами блока управления, первый вход которого подключен к входам электродвигателя и кулачкового.электроконтакого механизма, а второй входк входу источника излучения.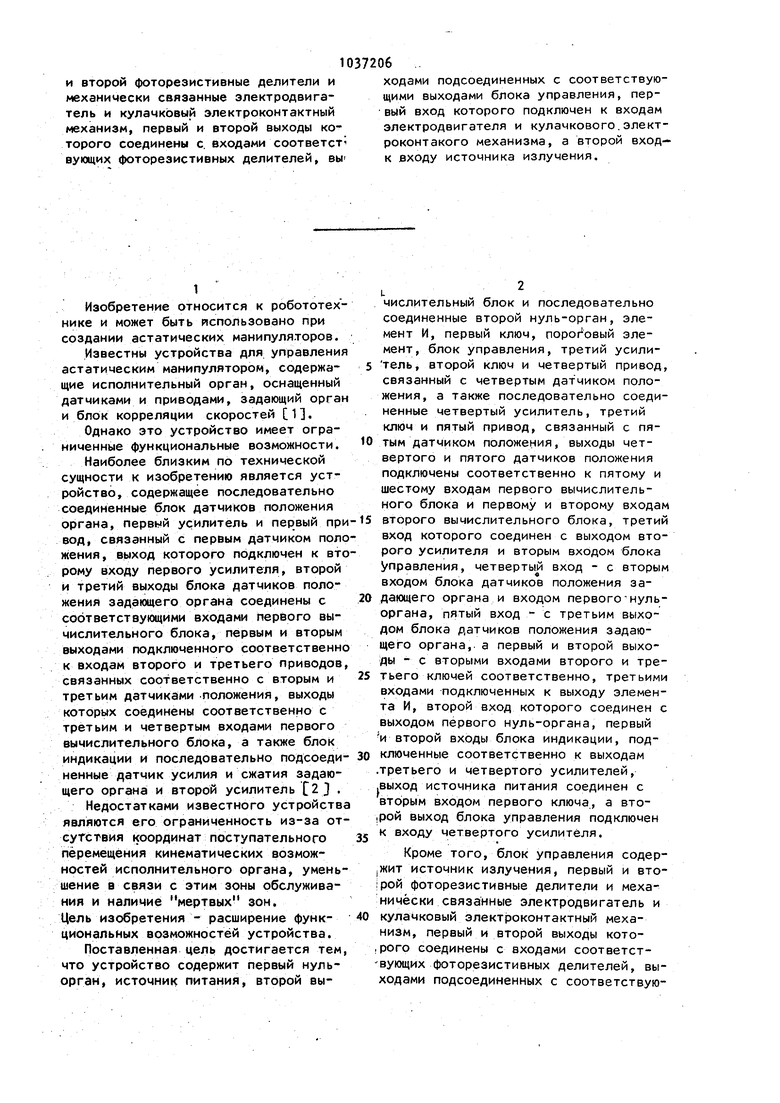
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления многозвенным манипулятором | 1985 |
|
SU1257613A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| Устройство для управления приводом робота | 1990 |
|
SU1782721A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2028930C1 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2041054C1 |
1
Изобретение относится к робототехнике и может быть использовано при создании астатических манипуляторов.
Известны устройства для управления астатическим манипулятором, содержащие исполнительный орган, оснащенный датчиками и приводами, задающий орган и блок корреляции скоростей 1.
Однако это устройство имеет ограниченные функциональные возможности.
Наиболее близким по технической сущности к изобретению является устройство, содержащее последовательно соединенные блок датчиков положения органа, первый усилитель и при вод, связанный с первым датчиком поло жения, выход которого подключен к вто рому входу первого усилителя, второй и третий выходы блока датчиков положения задающего органа соединены с соответствующими входами первого вычислительного блока, первым и вторым выходами подключенного соответственно к входам второго и третьего приводов, связанных соответственно с вторым и третьим датчика1ми положения, выходы которых соединены соответственно с третьим и четвертым входами первого вычислительного блока, а также блок индикации и последовательно подсоединенные датчик усилия и сжатия задающего органа и второй усилитель 2 .
Недостатками известного устройства являются его ограниченность из-за отсугствия координат поступательного перемещения кинематических возможностей исполнительного органа, уменьшение в связи с этим зоны обслуживания и наличие мертвых зон. Цель изобретения - расширение функциональных возможностей устройства.
Поставленная цель достигается тем, что устройство содержит первый нульорган, источник питания, второй вычислительный блок и последовательно соединенные второй нуль-орган, элемент И, первый ключ, пороговый элемент, блок управления, третий усили5 тель, второй ключ и четвертый привод, связанный с четвертым датчиком положения, а также последовательно соединенные четвертый усилитель, третий ключ и пятый привод, связанный с пятым датчиком положения, выходы четвертого и пятого датчиков положения подключены соответственно к пятому и шестому входам первого вычислительного блока и первому и второму входам 15 второго вычислительного блока, третий вход которого соединен с выходом второго усилителя и вторым входом блока управления, четвертый вход - с вторым входом блока датчиков положения задающего органа и входом первого-нульоргана, пятый вход - с третьим выходом блока датчиков положения задающего органа,, а первый и второй выходы - с вторыми входами второго и третьего ключей соответственно, третьими входами подключенных к выходу элемента И, второй вход которого соединен с выходом первого нуль-органа, первый и второй входы блока индикации, подключенные соответственно к выходам .третьего и четвертого усилителей, .выход источника питания соединен с вторым входом первого ключа, а вто|РОЙ выход блока управления подключен
J к входу четвертого усилителя.
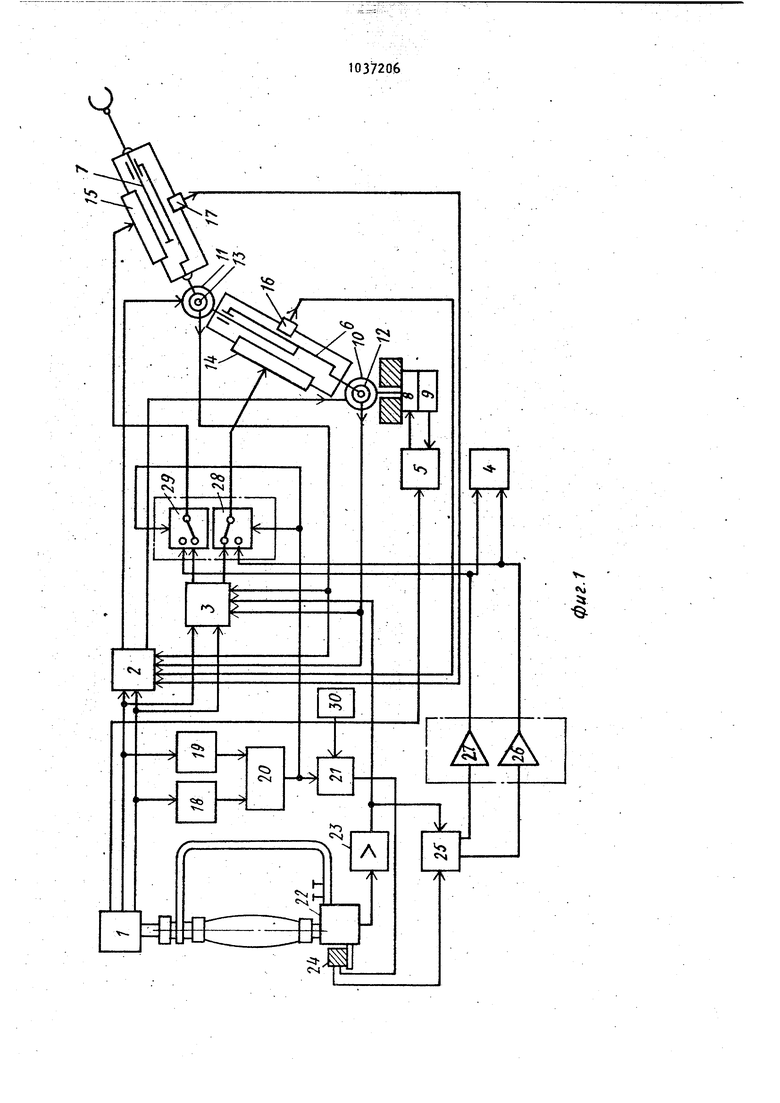
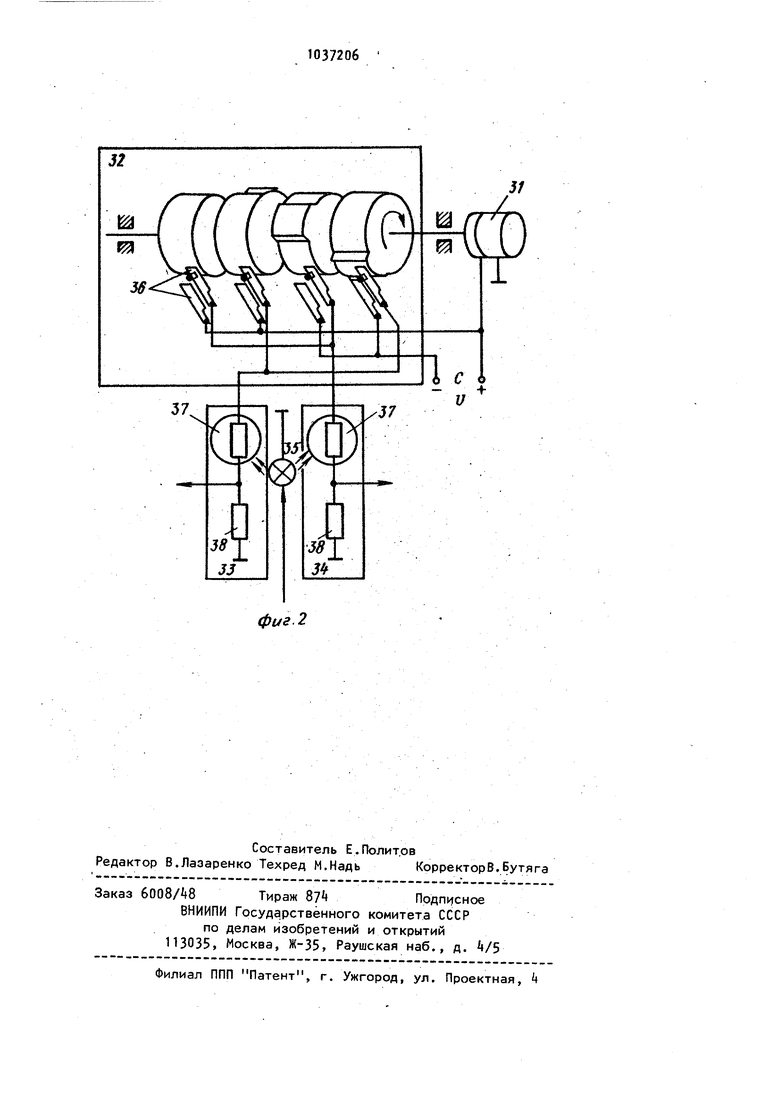
Кроме того, блок управления содер|ЖИт источник излучения, первый и вто|рой фоторезистивные делители и механически связанные электродвигатель и 0 кулачковый элект)эоконтактный механизм, первый и второй выходы кото,рого соединены с входами соответствующих фоторезистивных делителей, выходами подсоединенных с соответствующими выходами блока управления„ первый вход которого подключен к входам электродвигателя и кулачкового электроконтактного механизма, а второй вход - к входу источника излучения. На фиг.1 представлена функциональная схема устройства; на фиг.2 - фун циональная схема блока управления. Устройство содержит блок 1 датчиков положения задающего органа; первый и второй вычислительные блоки 2 и 3 соответственно; блок 4 индикации первый усилитель 5; звенья 6, 7 исполнительного органа; первый привод 8; первый датчик 9 положения; второй и третий приводы 10 и 11 соответственно; второй и третий датчики 12 и 13 положения соответственно; четвертый и пятый приводы 14 и 15 соответственно, четвертый и пятый датчики 16 и 17 положения соответственно; первый и второй нуль-органы 18 и 19 соответственно; элемент И 20 первый ключ 21; датчк 22 усилия сжатия задающего органа; второй усилите 23; пороговый элемент блок 25 уп равления; третий и четвертый усилители 2б и 27 соответственно; второй и третий ключи 28 и 29 соответственно; источник 30 питания. Блок управления содержит электродвигатель 31; кулачковый электроконтактный механизм 32, первый и второй фоторезистивные делители 33 и З соответственно, источник 35 излучения, контакты 36, фоторезисторы 37, резисторы 38. Устройство работает следующим образом. Воздействуя на рукоятки задающего органа, оператор обеспечивает перемеи.ения элементов исполнительного органа манипулятора со скоростями, пропорциональными величинам относительньЬ перемещений элементов зада10щего органа. Эта информация снимаетс с блока 1 датчиков положения задающе го органа. Полученные сигналы поступают на входы вычислительных блоков 2 и 3, где соответ,{;твенно по формула t - Кк(Хзсо5 S2+ Yasin г) (42-- 4l,) ii Кк(ХэС05 4i+ YasinHh) 2Е зГпСЧ - Ч-г) Kn(X3sin - УЗ cos ) sin( 42-%) b k- КпСУасозЧ--,- Xasin %) К -- s in( H-) ВЫЧИСЛЯЮТСЯ скорости 4,Ч угловых перемещений звеньев исполнительного ор- , гана и скорости Е, 2 линейных изменений длин звеньев исполнительного органа, причем, К, К - коэффициенты пропорциональности; X,, Y,- координаты задающего, органа; 4L чения угловых координат звеньев исполнительного органа; К - подстроечный коэффициент усиления. : Сюда же, на входы блока 2 поступают сигналы с датчиков 12, 13, 16, 17 положения исполнительного органа, а на входы блока 3-е датчиков 12; 13 положения. Полученные сигналы с выходов блока 2 подаются на приводы 10, 11, а с выходов блока 3 через ключи 28 и 29 - на приводы 1, 15. Позиционное управление вращением исполнительного органа манипулятора в плечевом шарнире осуществляется сигналом с блока 1 при помощи первого усилителя 5, привода 8 плечевого шарнира и обратной связи от датчика 9 положения плечевого шарнира. Скорость изменения длин звеньев исполнительного органа регулируется оператором, который силой сжатия рукоятки управления, изменяемой посредством датчика 22, задает величину коэффициента усиления К параметрической цепи машины. Сигнал с датчика 22 через усилитель 23 поступает в блок 3, где и используется при вычислении алгоритмов. Величина.коэффициента усиления п(эи этом регулируется в соответствии с требованиями к точности и скорости выполнения производственной операции. При появлении требования увеличить скорость выполнения операции оператор сжатием пружины обеспечивает включение координат поступательного перемещения. Вызванное им движение звеньев 6, 7 исполнительного органа манипулятора накладывается на движение других звеньев и увеличивает скорость выполнения задания. При необходимости точной работы манипулятора оператор уменьшает сжатие рукоятки управления, тогда коэффициент К становится близким к нулю. В этом случае производится управление координатами качания манипулятора. При появлении необходимости работы только координатами поступательного перемещения для увеличения маневренности, обхода препятствий оператор переводит задающий орган в нулевое
положение, тем самым обеспечивает отключение координат качания и автоматическое включение координат поступательного перемещения. В этом случае сигналы на выходах блока 1 равны нулю. Управляющие потенциалы с выходов нуль-органов t8, 19 подаются на входы элемента И 20. Далее управляющий потенциал с выхода элемента И 20 поступает на вход ключа 21, подключая источник 30 напряжения U на входы ключей 28 и 30, перебрасывая ключи 28 и 29. С источника 30 снимается напряжение положительной и отрицательной полярности, которое через пороговый элемент 2k поступает на вход блока 25 управления. Это напряжение запитывает электродвигатель 31 и контактные элементы 36. Механизм 32, вращаемый электродвигателем 31, воздействует на контактные элементы 36, таким образом, что с их выходов на фоторезйстивные делители 33 и З состоящие из фоторезисторов 37 и постоянных резисторов 38, последовательно поступают импульсы заданных
длительности и полярности. Пороговый элемент 24 образует зону нечувствительности по силе сжатия рукоятки задающего органа 1, что приводит к устойчивой работе цепи управления координатами поступательного перемещения. На выход блока 25 поступает сигнал с датчика 22, усиленный усилителем 23. Оператор сжатием рукоятки изменяет яркость источника 35 света, при этом изменяется величина сопротивления фоторезисторов 37, вследствие чего напряжение на выходах блока 25 будет менять свою величину. Далее управляющие сигналы через усилители 26 и 27 поступают на блок 2k индикации, а через ключи 28 и 29 - на приводы И, 15 исполнительного органа. Блок k индикации содержит четыре транспаранта с подсвечивающими их лампочками, сигнализирующими о выдвижении или вдвижении звеньев 6 и 7.
Применение изобретения за счет использования координат поступательного перемещения позволит расширить функциональные возможности устройства
фиг. 2
5/
