Изобретение относится к горной промышленности, а именно к автоматизации управления проходческими комплексами.
Известна система автоматического ведения горнопроходческого щита, содержащая оптический задатчик направления, блок отклонения луча, диафрагму, две матрицы с фотоэлементами, связанные оптически, блок контроля крена и блок выработки управляющего воздействия (а.с. СССР 1122823, кл. Е 21 С, 35/24, 1983).
К недостаткам известной системы относятся большие габариты, сложность следяще-измерительной системы и недостаточная надежность.
Известна система автоматического управления движением коллекторного проходческого щита, взятая за прототип, которая является наиболее близкой к предлагаемой, содержащая оптический задатчик направления, блок отклонения луча, диафрагму, две подвижные матрицы с фотоэлементами, связанные оптически, блок управления, блок измерения угла крена (а.с. СССР 1599537, кл. Е 21 С 35/24, 1988).
К недостаткам известной системы относятся: сложная механическая и оптическая часть следящей системы, недостаточная надежность, а также сложность конструкции приемной части системы.
Изобретение направлено на повышение надежности и эффективности управления механизмами передвижения щита и возведения крепи проходческого комплекса.
Это достигается тем, что система автоматического управления механизмами передвижения щита и возведения крепи тоннелепроходческого комплекса, содержащая датчик угла крена, вычислительное устройство и последовательно соединенные оптический задатчик направления, электрический модулятор, диафрагму и фотоэлектронное приемное устройство, состоящее из двух многоэлементных фотоприемников, снабжена двумя блоками выборки сигналов, двумя коммутаторами тока, блоком шинных формирователей и шестью буферными регистрами, аналоговыми датчиками угла крена, выдвижения гидродомкрата и копир-шарошки, цифровыми датчиками положения первого, второго и третьего звеньев манипулятора крепеукладчика, коммутатором напряжения, аналого-цифровым преобразователем, мультиплексором, одновибратором с логическим входом, ждущим мультивибратором, задающим генератором и интерфейсом, а многоэлементные фотоприемники выполнены в виде фотоячеек, объединенных системой вертикальных и горизонтальных шин, которые соответственно через первый и второй коммутаторы тока соединены с первыми входами соответственно первого и второго блоков выборки сигналов, к вторым входам которых подключен выход задающего генератора, к третьим и четвертым входам блоков выборки сигналов подключен выход ждущего мультивибратора, к входу которого подключен выход одновибратора с логическим входом, к входам которого подключены первые и вторые выходы блоков выборки сигналов, третьи и четвертые выходы которых подключены соответственно к первым входам соответственного первого, второго, третьего и четвертого буферных регистров блока шинных формирователей, ко вторым входам которых подключен выход одновибратора с логическим входом, а к входу пятого буферного регистра блока шинных формирователей подключен выход аналого-цифрового преобразователя, вход которого соединен с выходом коммутатора напряжений, к входам которого подключены выходы датчиков угла крена и выдвижения гидродомкратов и копир-шарошек и через интерфейс выход вычислительного устройства, а к входу последнего через интерфейс подключены выходы буферных регистров блока шинных формирователей. Причем каждый блок выборки сигналов состоит из демультиплексоров вертикальных и горизонтальных шин, счетчика, счетчика-делителя, двух блоков совпадения, двух накопительных регистров, одновибратора и последовательно соединенных усилителя, детектора и триггера, выход которого подключен к первым входам блоков совпадения, ко вторым входам которых подключены первые выходы демультиплексоров вертикальных и горизонтальных шин, вторые выходы которых являются соответственно первым и вторым выходами блока выборки сигналов, а выходы блоков совпадения подключены к первым входам накопительных регистров, вторые входы которых являются первым и вторым входами блока выборки сигналов, выход одновибратора подключен к входу счетчика, выходы которого подключены к входу демультиплексора горизонтальных шин, а через счетчик-делитель - к входу демультиплексора вертикальных шин, причем входы усилителя и одновибратора являются соответственно третьим и четвертым входами блока выборки сигналов, а третьи выходы демультиплексоров вертикальных и горизонтальных шин и выходы накопительных регистров являются соответственно третьим, четвертым, пятым и шестым выходами блока выборки сигналов.
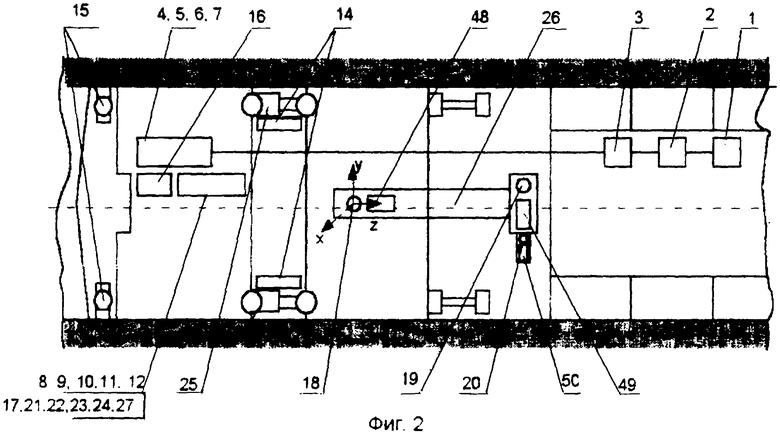
На фиг. 1 представлена функциональная схема системы автоматического управления передвижением шита и крепеукладчика тоннелепроходческого комплекса. На фиг. 2 представлено размещение аппаратуры системы автоматического управления передвижением на тоннелепроходческом комплексе и в тоннеле. На фиг.3 представлена блок-схема работы программы обработки данных системы автоматического управления движением щита и крепеукладчиком тоннелепроходческого комплекса.
Система состоит из оптического задатчика направления лазера 1, луч которого проходит через электрический модулятор 2 и диафрагму 3, поступает на два многоэлементных фотоприемника 4, 5, имеющих матричную структуру, электрически связанных через коммутатор тока 6, 7 с блоками выборки сигналов 8, 9 и через блок шинных формирователей 10, интерфейс 11 с вычислительным устройством 12 и пультом оператора 13; датчиков выдвижения управляющих гидродомкратов 14; датчиков выдвижения копир-шарошек 15 и датчика угла крена 16, электрически связанных с коммутатором напряжения 17; датчиков положения первого, второго и третьего звеньев манипулятора крепеукладчика 18, 19, 20, электрически связанных с мультиплексором 21.
Коммутатор напряжения 17 через аналого-цифровой преобразователь 22, блок шинных формирователей 10, интерфейс 11 связан с вычислительным устройством 12 и пультом оператора 13. Мультиплексор 21 через блок шинных формирователей 10, интерфейс 11 связан с вычислительным устройством 12 и пультом оператора 13. Вычислительное устройство 12 через интерфейс 11, выходной регистр 23 и блок реле 24 связано с исполнительными устройствами 25 механизма передвижения щита и 26 механизма возведения крепи. Задающий генератор 27 связан с блоками выборки сигналов 8, 9, каждый из которых состоит из одновибратора 28, связанного со счетчиком 29, один вход которого соединен со входом демультиплексора горизонтальных шин 30, а второй через счетчик-делитель 31 связан со входом демультиплексора вертикальных шин 32. Вход усилителя 33 соединен с коммутатором тока 6 (7), а выход через детектор 34 и триггер 35 связан с одним из входов блоков совпадения 36 и 37, выходы которых соединены посредством накопительных регистров 38 и 39 с буферными регистрами 40, 41, 42 и 43 блока шинных формирователей 10, в состав которого входит также буферный регистр 44, вход которого связан с аналого-цифровым преобразователем 22, а выход - с интерфейсом 11 и буферный регистр 45, вход которого соединен с мультиплексором 21, а выход с интерфейсом 11. Вход ждущего мультивибратора 46 соединен с выходом одновибратора с логическим входом 47, а выход - со вторыми входами накопительных регистров 38 и 39. Крепеукладчик 26 имеет три звена: привод первого звена 48, привод второго звена 49, привод третьего звена 50. Блок-схема программы обработки данных состоит из блока пуска программы 51, блока ввода данных 52, блока вычисления координат отклонения луча на ножевом и хвостовом фотоприемниках 53, блока вычисления величины выдвижения управляющих гидродомкратов 54, блока вычисления угла крена 55, блока вычисления положения тоннелепроходческого комплекса 56, блока вычисления координат звеньев манипулятора 57, блока выдачи управляющих воздействий 58, блока задержки времени 59. Вся программа обработки данных выполняется микропроцессором.
Лазер 1, электрический модулятор 2, диафрагма 3 устанавливаются в тоннеле, а все остальные блоки на тоннелепроходческом комплексе.
Получение информации о координатах оси проходческого щита осуществляется посредством многоэлементных фотоприемников 4, 5, а в качестве чувствительных элементов в фотоприемнике используются фотодиоды. Фотоприемник имеет матричную структуру, представляющую собой решетки фотоячеек, объединенных системой вертикальных "X" и горизонтальных "Y" шин и позволяющих производить выборку выходного сигнала.
Система автоматического управления механизмами передвижения шита и возведения крепи тоннелепроходческого комплекса работает следующим образом.
Задающий генератор 27 вырабатывает прямоугольные импульсы, которые поступают на вход одновибратора 28, который включает счетчик 29, один выход которого соединен со входом демультиплексора горизонтальных шин 30, а второй выход через счетчик-делитель 31 со входом демультиплексора вертикальных шин 32. Счетчик 29 с частотой задающего генератора 27 посредством демультиплексора горизонтальных шин 30 через коммутатор тока 6 подключает по очереди все горизонтальные шины ко входу усилителя 33. Счетчик-делитель 31 посредством демультиплексора вертикальных шин 32 с частотой задающего генератора 27, деленной на число горизонтальных шин, подключает по очереди вертикальные шины к источнику напряжения. Таким образом, производится опрос всех фотоячеек. Если какой-то фотодиод матрицы освещен лучом лазера 1, то в момент подключения к нему источника напряжения, снимается сигнал, поступающий на вход усилителя 33. Усиленный сигнал через детектор 34 подается на триггер 35. С триггера 35 сформированный сигнал "1" подается на блоки совпадения 36 и 37, на вторые входы которых поочередно подаются сигналы с демультиплексоров горизонтальных и вертикальных шин 30 и 32. При совпадении сигналов с триггера и демультиплексоров горизонтальных и вертикальных шин 30 и 32 на входах блоков совпадения 36 и 37, на их выходах формируются сигналы "1", которые записываются в накопительные регистры "X" 38 и "Y" 39. После прохождения цикла опроса всех фотоячеек, сигналами с демультиплексоров горизонтальных и вертикальных шин 30 и 32 запускается одновибратор с логическим входом 47, который подает стробирующий сигнал на буферные регистры 40, 41, 42, 43. В результате этого информация переписывается с накопительных регистров 38 и 39 в буферные регистры 40 и 41. После этого производится обнуление накопительных регистров 38 и 39 сигналом, поступающим с выхода ждущего мультивибратора 46, который запускается сигналом с одновибратора с логическим входом 47. Сигнал со ждущего мультивибратора подается с выдержкой времени, необходимой для пересылки информации с накопительных регистров 38 и 39 в буферные регистры 40, 41. Канал получения информации со второго фотоприемника 5 имеет аналогичную схему первому, причем выборка и обработка сигналов идет параллельно. Величины выдвижения управляющих домкратов, измеренные датчиком 14, выдвижение копир-шарошек, измеренные датчиками 15, а также угол крена, измеренный датчиком 16, через коммутатор напряжения 17 и аналогово-цифровой преобразователь 22 подаются в буферный регистр 44. Величины выдвижения звеньев манипулятора крепеукладчика первого, измеренного датчиком 18, второго, измеренного датчиком 19, и третьего, измеренного датчиком 20, через мультиплексор 21, подаются в буферный регистр 45.
Обработка информации вычислительным устройством 13 ведется по следующему алгоритму:
После ручного или автоматического пуска программы блоком 51, осуществляется ввод данных в память вычислительного устройства из буферных регистров 40, 41, 42, 43, 44 и 45 блоком 52. Вычисление координат блоком 53 осуществляется следующим образом. Если засвечены один или несколько фотодиодов фотоприемника, то вычисляется расстояние от начала координат до оси луча лазера, как средняя величина по формулам:
Xi=L•i;
Xнп=(Xi+1+Xi)/K,
где i - номер засвеченного (опрошенного) фотоэлемента (i=0,1,.... n);
n - количество вертикальных шин в матрице;
Xi - расстояние до засвеченного фотоэлемента от начала координат;
L - коэффициент масштабирования (расстояние между фотоэлементами);
K - количество засвеченных элементов;
Xнп - координата отклонения оси луча на ножевом фотоприемнике.
Определение Yнп координаты Y на ножевом фотоприемнике и Ххп, Yxн - координат Х и Y на хвостовом фотоприемнике производится по аналогичному алгоритму.
Масштабирование величины выдвижения управляющих гидродомкратов и копир-шарошек блоком 54, а также величины угла крена блоком 55 выполняется по следующим формулам:
Ai=2i;
A=(Ai+1+Ai)•M,
где Ai - десятичное число, соответствующее первому элементу, равному "l" двоичной информационной последовательности;
i - номер элемента, равного "l" двоичной информационной последовательности;
М - коэффициент масштабирования соответственно датчиков выдвижения управляющих домкратов, копир-шарошек, датчика крена;
А - величина, соответствующая выдвижению управляющих домкратов, копир-шарошек, а также величины угла датчика крена.
Вычисление положения тоннелепроходческого комплекса в пространстве блоком 56 производится по следующим формулам:
Хн=Хнп+a•sin(q)+lн•sin(arctn ((Хxп-Хнп)/L));
Yн= Yнп+a•(l-cos(q))+lн•sin(arctn((Yxп-Yнп)/L));
Xx= Хxп+a•sin(q)+lн•sin(arctn((Хxп-Хнп)/L);
Yx= Yxп+a•(l-cos(q))+lн•sin(arctn((Yxп-Yнп)/L));
где Хн, Yн, Xx, Yx - координаты ножа и хвоста комплекса в пространстве;
Хнп, Yнп, Xxп, Yxп - координаты отклонения луча на ножевом и хвостовом многоэлементных фотоприемниках 4,5;
а - установочный размер фотоприемного устройства в вертикальной плоскости относительно продольной оси щита;
lн- расстояние от ножа до ножевого многоэлементного фотоприемника;
lх - расстояние от хвоста до ножевого многоэлементного фотоприемника;
L - расстояние между ножевым и хвостовым многоэлементными фотоприемниками (4 и 5);
q = А - угол крена.
Алгоритм работы крепеукладчика, выполняемый блоком 57, следующий.
Начало абсолютной системы координат крепеукладчика вычисляется следующим образом:
Xк=Xx+(lдвх+Lp-c)sin(arctn((Хxп-Хнп)/L))+(Lp-c)sin((lдвх-lднх)/D));
Yк=Yx+(lдвy+Lp-c)sin(arctn((Yxп-Yнп)/L))+(Lp-c)sin((lдвy-lднy)/D));
Zк=lдz+Lp-c,
где lдвх, lднх, lдвy, lднy - величины выдвижения верхних и нижних домкратов в горизонтальной и вертикальной плоскостях;
lдz - максимальная длина величины выдвижения домкратов в плоскости Z;
Lp - длина распорного кольца;
D - диаметр опорного кольца гидродомкратов;
с - установочная величина для крепеукладчика в горизонтальной плоскости.
Координаты схвата манипулятора крепеукладчика в собственной системе координат вычисляются следующим образом.
Zm=Zк+ll+q1;
Xm=Xк-sinq2(l3+q3);
Ym=Yк-cosq2(l3+q3),
где q1,q2,q3 - обобщенные координаты первого, второго и третьего звеньев манипулятора для укладки крепи, которые определяются цифровыми датчиками 18, 19, 20;
Zm, Xm, Ym - горизонтальная координата по продольной оси выработки, горизонтальная координата по поперечной оси выработки и вертикальная координата соответственно;
ll, l3 - длины первого и третьего звеньев манипулятора крепеукладчика.
После того как щит передвинулся на заданное расстояние и определено его новое положение, программа, в соответствии с блоком 58, реализует алгоритм движения звеньев манипулятора крепеукладчика для возведения крепи, заключающийся в следующем.
С вычислительного устройства 12 через интерфейс 11 и выходной регистр 23 и блок реле 24 выдается сигнал управления на выдвижение первого звена манипулятора крепеукладчика по оси выработки 48. При достижении звеном необходимого положения, датчиком положения 18, измеряющим обобщенную координату q1, через мультиплексор 21 и блок буферных регистров 10, интерфейс 11 выдается сигнал на вычислительное устройство 12 для перехода к следующему участку программы.
После этого с вычислительного устройства 12 через интерфейс 11, выходной регистр 23 и блок реле 24 выдается сигнал управления на отключение привода первого звена и на выдвижение третьего звена 50 манипулятора крепеукладчика по оси Z. При достижении звеном необходимого положения, датчиком положения 20 через мультиплексор 21 и блок буферных регистров 10, интерфейс 11 выдается сигнал на вычислительное устройство 12.
Затем с вычислительного устройства 12 через интерфейс 11, выходной регистр 23 и блок реле 24 выдается сигнал управления на отключение привода третьего звена и на захват тюбинга схватом. Как только схват захватил тюбинг, происходит выдача с вычислительного устройства 12 через интерфейс 11, выходной регистр 23 и блок реле 24 сигнала управления на реверс привода третьего звена 50 манипулятора крепеукладчика. При достижении звеном требуемого положения, датчиком положения 20 через мультиплексор 21 и блок буферных регистров 10, интерфейс 11 выдается сигнал на вычислительное устройство 12.
После этого с вычислительного устройства 12 через интерфейс 11, выходной регистр 23 и блок реле 24 выдается сигнал управления на отключение привода третьего звена и на реверсирование привода первого звена манипулятора крепеукладчика 48. Как только первое звено достигло начального положения, датчиком положения 18 через мультиплексор 21 и блок буферных регистров 10, интерфейс 11 выдается сигнал на вычислительное устройство 12.
В результате с вычислительного устройства 12 через интерфейс 11, выходной регистр 23 и блок реле 24 выдается сигнал управления на отключение привода первого звена 48 и на включение привода второго звена 49 манипулятора крепеукладчика для поворота на заданный угол. Как только второе звено достигло заданного положения, датчиком положения 19 через мультиплексор 21 и блок буферных регистров 10, интерфейс 11 выдается сигнал на вычислительное устройство 12.
Затем с вычислительного устройства 12 через интерфейс 11, выходной регистр 23 и блок реле 24 выдается сигнал управления на отключение привода второго звена 49 и на включение третьего звена манипулятора крепеукладчика 50. Как только третье звено достигло заданного положения, датчиком положения 20 через мультиплексор 21 и блок буферных регистров 10, интерфейс 11 выдается сигнал на вычислительное устройство 12.
После этого с вычислительного устройства 12 через интерфейс 11, выходной регистр 23 и блок реле 24 выдаются сигналы управления на отключение привода третьего звена 50 и на установку тюбинга.
Как только тюбинг установлен, с вычислительного устройства 12 через интерфейс 11, выходной регистр 23 и блок реле 24 выдается сигнал управления на реверсирование привода третьего звена. Как только третье звено 50 достигло начального положения, датчиком положения 20 через мультиплексор 21 и блок буферных регистров 10, интерфейс 11 выдается сигнал на вычислительное устройство 12.
В следующий момент с вычислительного устройства 12 через интерфейс 11, выходной регистр 23 и блок реле 24 выдается сигнал управления на отключение привода третьего звена 50 и на реверсирование второго звена манипулятора крепеукладчика 49 для возврата его в начальное положение. Как только второе звено достигло заданного положения, датчиком положения 19 через мультиплексор 21 и блок буферных регистров 10, интерфейс 11 выдается сигнал на вычислительное устройство 12.
С вычислительного устройства 12 через интерфейс 11, выходной регистр 23 и блок реле 24 выдается сигнал управления на отключение привода второго звена 49. В результате этого звенья манипулятора возвратились в исходное положение. После этого алгоритм повторяется.
Блок вычисления координат центра схвата выдает данные на монитор оператора.
Выдача рекомендаций на пульт интерфейс 13 в блоке 58 выражается в виде совокупности номеров управляющих домкратов, необходимых для перемещения комплекса в требуемом направлении, и определяется в соответствии с типом щита. В этом же блоке выдается номер звена манипулятора крепеукладчика для перемещения. После обработки полученных данных происходит задержка времени блоком 59 и переход работы программы на блок 52, а вычислительное устройство 12 выдает управляющие сигналы на выходной регистр 23, блок реле 24, который включает посредством исполнительных устройств 25 (например, электрогидрозолотников) управляющие гидродомкраты щита и звенья манипуляторов крепеукладчика 26. Пульт интерфейс 13 (например, видеомонитор) предназначен для отображения вспомогательной информации и вывода рекомендаций по ведению тоннелепроходческого комплекса и возведения крепи тоннеля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| МОДУЛЬ ДЛЯ ОБМЕНА СООБЩЕНИЯМИ | 2003 |
|
RU2249849C1 |
| УСТРОЙСТВО ДЛЯ КЛАССИФИКАЦИИ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ ПО ФОРМЕ КРИВОЙ РАЗМАГНИЧИВАНИЯ | 2000 |
|
RU2185635C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА | 2001 |
|
RU2199753C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2001 |
|
RU2208794C1 |
| МОДУЛЬ МАТРИЧНОЙ КОММУНИКАЦИОННОЙ СЕТИ | 2000 |
|
RU2168755C1 |
| МОДУЛЬ МАТРИЧНОГО КОММУТАТОРА | 1996 |
|
RU2110831C1 |
| МОДУЛЬ КОММУНИКАЦИОННОЙ СЕТИ | 2000 |
|
RU2166793C1 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2000 |
|
RU2181903C2 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2000 |
|
RU2185659C1 |

Изобретение относится к горной промышленности, а именно к автоматизации управления проходческими комплексами. Техническим результатом является повышение надежности и эффективности управления механизмами передвижения щита и возведения крепи проходческого комплекса. Система содержит последовательно соединенные оптический задатчик направления, электрический модулятор, диафрагму и фотоэлектронное приемное устройство, два блока выборки сигналов, два коммутатора тока, блок шинных формирователей, коммутатор напряжения, аналого-цифровой преобразователь, мультиплексор, одновибратор с логическим входом, ждущий мультвибратор, задающий генератор, интерфейс, вычислительное устройство и датчики угла крена, выдвижения гидродомкратов и копир-шарошек, а также датчики выдвижения звеньев манипулятора крепеукладчика. Блок шинных формирователей состоит из шести буферных регистров. Фотоэлектронное приемное устройство состоит из двух многоэлементных фотоприемников, выполненных в виде фотоячеек, объединенных системой вертикальных и горизонтальных шин. Раскрыто выполнение блока выборки сигналов. 1 з.п. ф-лы, 3 ил.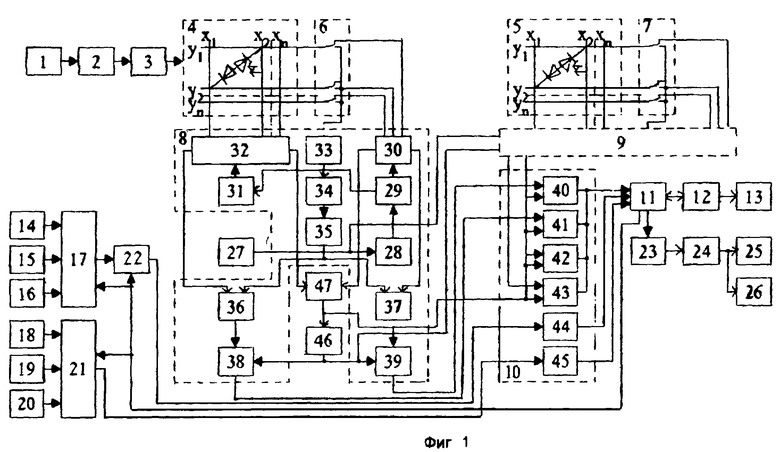
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| RU 95109576 А1, 27.05.1997 | |||
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Способ управления горной машиной и устройство для его осуществления | 1987 |
|
SU1502828A1 |
| Система управления движением проходческого щита | 1982 |
|
SU1073455A1 |
| Система управления движением горной машины | 1974 |
|
SU682647A1 |
| СПОСОБ УПРАВЛЕНИЯ ГОРНОЙ МАШИНОЙ | 1988 |
|
RU2041353C1 |
| GB 1383756 А, 12.02.1975. | |||

