Изобретение относится к робототехнике и может быть использовано пр создании многокоординатных манипуляторов.
Целью изобретения является упрощение устройства за счет исключения вычислительной машины из контура управления многокоординатныи манипулятором.
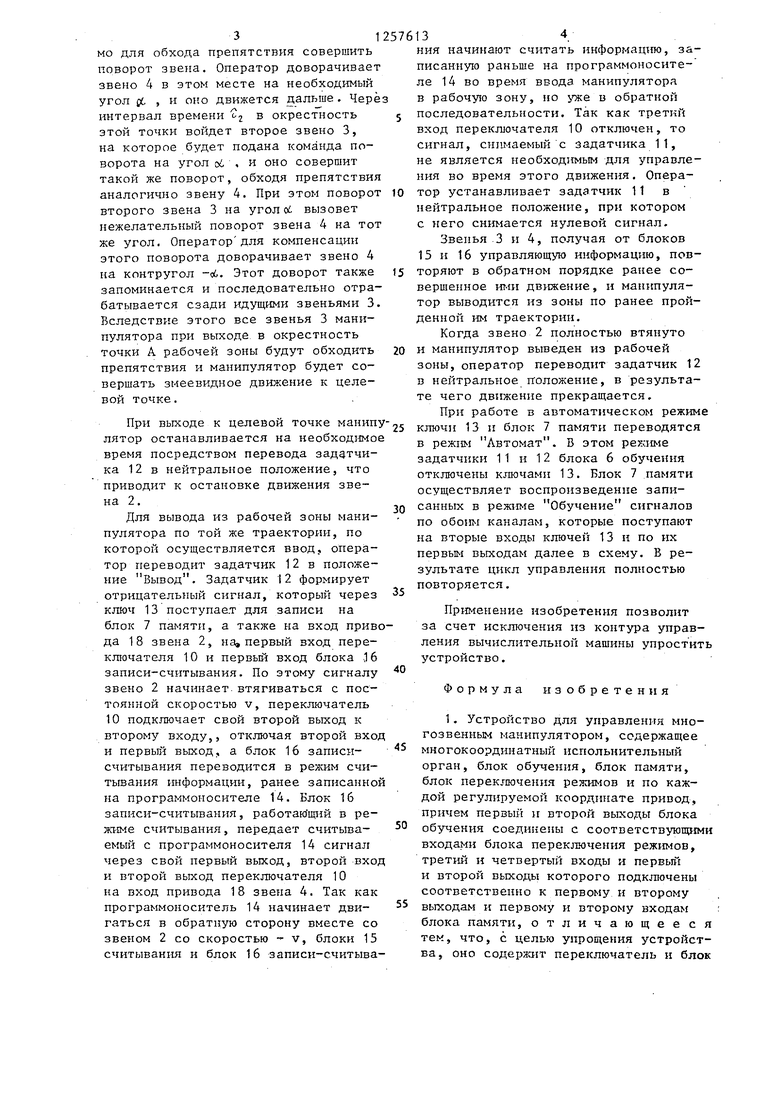
На фиг. 1 представлена кинематическая схема манипулятора; на фиг. 2 функциональная схема предлагаемого устройства.
На фиг. 1 обозначены корпус 1, первое звено 2, промежуточные звенья 3, последнее звено 4, схват 5, а на фиг. 2 - блок б обучения, блок 7 памяти, блок 8 переключения режимов, блок 9 записи программы, переключатель 10, первьй и второй задатчик 11 и 12 сигнала соответственно, ключи 13, программоноситель 14, блок 15 считывания, блок 16 записи-считывания, стирающий блок 17, приводы 18, датчики 19 угла, усилители 20, двигатели 21 и сумматоры 22.
Устройство работает следующим образом.
В исходном состоянии манипулятор установлен против рабочей зоны. Звено 2 полностью втянуто, звенья 3 и 4 вытянуты в прямую линию. Блок 7 памяти и ключи 13 переключены в режим Обу 1ение , задатчик 1 2 находится в нейтральном положении, задатчик 11 установлен в положение, когда с него снимается нулевой сигнал. Стирающий блок 17 при работе устройства включен постоянно. I
Для ввода в зону манипулятора
оператор переводит задатчик 12 в положение Ввод, в результате чего формируется положительный сигнал постоянной величины, который поступает на 13. Далее этот сигнал подается на блок 7 памяти, который запоминает его, а также на первьй вход переключателя 10 и первый вход блока 16 записи-считывания, переводя последний в режим записи поступающей по второму входу информации на программоноситель 14. Переключатель 10 подключает свой третий вход непосредственно к первому и второму выходам. Кроме того, положительный сигнал с первого выхода ключа 13 подается на стабилизированный электропривод 18 звена 2. В результате
это звено начинает выдвигаться со скоростью V, вводя цепочку звеньев 3 и 4 в рабочую зону. Вместе со звеном 2 начинает перемещаться с той же
скоростью V относительно блоков 15-17 (закрепленных на корпусе 1) связанный с ним программоноситель 14.
Оператор, визуально контролируя положение звена 4, направляет его по заданной траектории движения. Для этого он посредством задатчика 11 формирует аналоговый сигнал, поступающий на ключ 13. Этот сигнал с ключа 13 подается одновременно на
другой канал блока 7 памяти для запоминания , а также на третий вход переключателя 10. Переключатель 10 направляет этот сигнал на привод 18 зве-- на 4, который отрабатывает заданный
поворот, и в результате звено 4, поворачиваясь на соответствующий угол, ложится на заданную траекторию (сигнал поступает на вход сумматора 22 на второй вход которого подается
сигнал с датчика 19. и формируемый таким образом разностный сигнал через усилитель 20 подается на двигатель 21 для обеспечения поворота звена 4). Одновременно сигнал, поступающий по входу переключателя 10, подается через его выход на второй вход блока 16 записи-считывания, работающего в режиме записи. В результате данный аналоговый сигнал
записывается на движущийся со скоростью V программоноситель 14 и поочередно с задержкой во времени t; считывается блоками 15 считывания.
40
г-.- (i-i)i.
i - номер звена (, k-1); - длина звена; V - скорость движения конечного звена 2.
Каждый i-блок 15 считывания вьща- ет считанный с задержкой f; сигнал на соответствующий привод 18 звена 3, находящегося на i-м месте в кинематической цепочке звеньев 3, начиная от звена 4. Тактч образом, промежуточные звенья 3 поочередно по мере вЕюда в рабочую зону отрабатывают движения звена 4 и движутся по одной и той же траектории, пройденной зве-- ном 4, Действительно, пусть в некоторой точке А рабочей зоны необходиМО для обхода препятствия совершить поворот звена. Оператор доворачивает звено 4 в этом месте на необходимый угол fC , и оно движется дальше, Чере интервал времени i в окрестность этой точки войдет второе звено 3, на которое будет подана команда поворота на угол об , и оно совершит такой же поворот, обходя препятствия аналогично звену 4. При этом поворот второго звена 3 на угол oi вызовет нежелательный поворот звена 4 на тот же угол. Оператор для компенсации этого поворота доворачивает звено 4 на контругол -об. Этот доворот также запоминается и последовательно отрабатывается сзади идущими звеньями 3. Вследствие этого все звенья 3 манипулятора при выходе в окрестность точки А рабочей зоны будут обходить препятствия и манипулятор будет совершать змеевидное движение к целевой точке.
При выходе к целевой точке MaHnny лятор останавливается на необходимое время посредством перевода заддтчи- ка 12 в нейтральное положение, что приводит к остановке движения звена 2.
Для вывода из рабочей зоны манипулятора по той же траектории, по которой осуществляется ввод, оператор переводит задатчик 12 в положение Вывод. Задатчик 12 формирует отрицательный сигнал, который через ключ 13 поступает для записи на блок 7 памяти, а также на вход привода 18 звана 2, на, первый вход переключателя 10 и первый вход блока 16 записи-считывания. По этому сигналу звено 2 начинает втягиваться с постоянной скоростью V, переключатель 10 подключает свой второй выход к второму входу,, отключая второй вход и первьш выход, а блок 16 записи- считывания переводится в режим считывания информации, ранее записанной на программоносителе 14. Блок 16 записи-считывания, работаю ип1й в режиме считывания, передает считываемый с программоносителя 14 сигнал через свой первый выход, второй вход и второй выход переключателя 10 на вход привода 18 звена 4. Так как программоноситель 14 начинает дви- гаться в обратную сторону вместе со звеном 2 со скоростью - v, блоки 15 считывания и блок 16 записи-считыва
0
r
5 °
0
0
ния начинают считать информацию, записанную раньше на программоносителе 14 во время ввода манипулятора в рабочую зону, но гже в обратной последовательности. Так как третий вход переключателя 10 отключен, то сигнал, снимаемый с задатчика 11, не является необходш лм для управления во время этого движения. Оператор устанавливает задатчик 11 в нейтральное положение, при котором с него снимается нулевой сигнал.
Звенья 3 и 4, получая от блоков 15 и 16 управляющую информацию, повторяют в обратном порядке ранее совершенное ит-ш движение, и манипулятор выводится из зоны по ранее пройденной нм траектории.
Когда звено 2 полностью втянуто и манипулятор выведен из рабочей зоны, оператор переводит задатчик 12 в нейтральное положение, в результате чего движение прекращается.
При работе в автоматическом режиме ключи 13 и блок 7 памяти переводятся в режим Автомат. В этом рех;име задатчики 11 и 12 блока 6 обучения отключены ключами 13. Блок 7 памяти осуществляет воспроизведение записанных в режиме Обучение сигналов по обоим каналам, которые поступают на вторые входы ключей 13 и по их первым выходам далее в схему. В результате цикл управления полностью повторяется.
Применение изобретения позволит за счет исключения из контура управления вычислительной машины упростить устройство.
Формула изобретения
1. Устройство для управления многозвенным манипулятором, содержащее многокоордииатный испольнительный орган, блок обучения, блок памяти, блок переключения режимов и по каждой регулируемой координате привод, причем первый и второй выходы блока обучения соединены с соответствующими входш и блока переключения режимов, третий и четвертый входы и первьш и второй выходы которого подключены соответственно к первому и второму выходам и первому и второму входам блока памяти, отличающееся тем, что, с целью упрощения устройства, оно содерясит переключатель и блок
51
записи программы, кинематически связанный через исполнительный орган с приводом первой регулируемой координаты, вход которого соединен с первым выходом блока переключения режимов и с первым входом перек.гж)чате- ля, и первымfвходом блока записи программы, подключенного первыми выходами к входам приводов всех регули руемых координат, кроме первой и последней, а вторыми входом и выходом - соответственно к первому выходу и второму входу переключателя, третий вход которого соединен с вто- рьи выходом блока переключения режимов, а второй выход - с входом приво
376136
да последней регулируемой координаты.
2. Устройство по п. 1 ,, о т л и- чающееся тем, что блок запи- 5 си программы содержит программоноситель и установленные вдоль программоносителя стирающий блок, блок записи-считывания и блоки считывания, причем первый и второй входы и пер- 10 вые и второй выходы блока записи программы соединены соответственно с первым и вторым входами блока записи-считывания, с выходами блоков считывания и выходом блока записи-считыва- 15 ния,а кинематически блок записи программы связан с программоносителем.
Редактор А, Лежнина
tfSat.Z
Составитель Е. ПоЛитов Техред М.Ходанич
////////////
Корректор М. Самборская
Заказ 4955/46
Тираж 836
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, , Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для записи программы контурного управления промышленным роботом | 1978 |
|
SU930255A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Контурная система программного управления многокоординатным манипулятором | 1977 |
|
SU740491A1 |
| Устройство для программногоупРАВлЕНия МНОгОКООРдиНАТНыММАНипуляТОРОМ | 1978 |
|
SU807215A1 |
| Система контурного программного управления манипулятором | 1977 |
|
SU620368A1 |
| Устройство для программного управления многокоординатным манипулятором | 1981 |
|
SU985762A1 |
| Устройство для программного управления | 1972 |
|
SU541147A1 |
| Устройство для записи программы управления промышленным роботом | 1977 |
|
SU726494A1 |
| Стенд-тренажер для оценки качества задания программ управления промышленным роботом для сварки | 1985 |
|
SU1291387A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
Изобретение относится к области машиностроения и может быть использовано при создании многокоординатных манипуляторов. Цель изобретения состоит в упрощении устройства за счет исключения вычислительной машины из контура управления многокоординатным манипулятором. Устройство содержит многокоординатный исполнительный орган, состоящий из первого звена, промеясуточных звеньев и последнего звена с установленным на нем схватом, блок обучения, блок памяти, блок переключения режимов, блок записи программ, переключатель, два задат- чика сигнала, ключи, программоноситель, блоки считывания, блок записи- считывания, стирающий блок, приводы исполнительного органа по каждой регулируемой координате. Программоноситель кинематически связан с приводом первой регулируемой координаты. Устройство позволяет оператору при движении многокоординатного исполнительного органа манипулятора по сложной траектории управлять только движением одного - последнего звена со схватом, а все остальные звенья повторяют запомненные движения этого звена с учетом соответствующих поправок. 2 ил. ш- (Л ю ел 
| Программное устройство для управления перемещением | 1973 |
|
SU490083A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патон Б.Е | |||
| и др | |||
| Промьшленные роботы для сварки | |||
| Киев: Наукова думка, 1977, с | |||
| Ребристый каток | 1922 |
|
SU121A1 |
