Изобретение относится к станкои машиностроению,, Известна схема электромеханического делительного устройства для за дания угловых положений исполнитель ному органу, содержащая датчик поло жения, выполненный э виде многополю ного вращающегося трансформатора с числом пар полюсов|, кратным числу фиксированных угловых положений исполнительного органа,, который непосредственно связан с выходным валом датчика положения,- источник перемен . ного тока. следявд/ю систему, выполненную в виде усилителя у двигателя с обмоткой управления,, редуктора, выходной вал которого связан с ука эанным датчиком г и устройства управления, содержащего управляющий я . .дополнитвпьг-ый переклгочатепи Cl J, Недостаткакш известной схемы яйляются Бксокая трудоемкость и значительное время задания угловых положений .исполнительного органа вслед 5твие ручного переключения в опредв ленной исходной последовательности управляющего переключателя для задания следующего углового положения м ;эозмож1-юстьго ошибок оператора о6усл:О.влеиыы 5 необходимостью подключенйя источника переменного тока краткозременко к обмотке управления двигателем и соблюдения последова-тельности пepeклIOчeния ш управляющего пера ключателя: „ Цель изобретения - снижение трудо емкости, сокращение времени задания угловых положений исполнит ел bHOivry органу и нстслючение возможных ошибок оператора путем автоматизации процес са заданием угловых положений исполнительному органу Указанная цель достигается тем, что в схеме электромеханического делительного, устройства для задания угловых положекий исполнительному . органу, содержащей датчик положения выполненный в виде нногополюсно.го вращающегося трансфор у атора с числом пар полюсов, кратным чисггу фикакро- ванных угловых положений исполнитель ного органа, связанного кепосредстве но с выходным валом датчика положения, источник переменного тока, следящую систел Ус выпо-пненную в зиде усилителя, двигателя с обмоткой упр лания редукторр, выходкой зал которого связанс указаН5-1ым датчиком и устройства управления, содержащего ; переключатель, включенный s цепь, соецинягачУю выходные обмотки датчика положения с усилителем, устройство управления снабжено переключателем режимов работы р релейНЕ ьч тpиггepo я управляющий входкоторого через первые контакты переключа1еля режимов работыf первую якфференцируййаую цепочку и кнопку запуска соединен с источником постоянного тока,, к КОТО рому подклмчена шина питания релейного триггера а контакты релейного триггера включены в цепь питания обмотки возбуждения датчика положения, пусковым реле с второй дифференцирующей цепочкой, выполненной в виде магазина емкостей, соединенной через, вторые контакты переключателя режимов работы и кнопку запуска с источНИКОМ постоянного тока, причем контакты пускового реле включены в цепь, соединяющую выходные обмотки датчика положения с усилителем. На фиг. 1 приведена функциональная схема электромеханического делительного, устройства для задания угловых положений исполнительному органуj на фиг,2 - диаграмма задания угловых положений по каждой нулевой точке датчика положения с одной из его выходных обмоток; на фиг. 3 - диаграмма задания угловых положений через одну нулевую точку датчика положения с одной из его выходных обмоток. Схема электромеханического дели тельного устройства для задания угловых, положений исполнительному органу (фиго 1) содержит датчик положения лногополюсный вращающийся трансформатор (МВТ) 1 с обмоткой .2- возбуждения (ОБ) р подключенной .к источнику переменного тока ц- и синусной (ВСО) 3 и косинусной (ВКО) 4, выходными обмотками который установлен на одном валу с исполнителькым органом 5 о Выходные обмотки 3 и 4 МВТ 1 подсоединены с одной стороны через переключатель на пять положений п2 к усилителю б, а с другой стороны одна из выходных обмоток 3 или 4 подключается через переключатель.на три положения п1 и контакты К2, в положении 1-1, пускового реле Р2 к усилителю б. Выход усили.теля б соединен с обмоткой 7 управления (ОУ) двигате-пя 8, имеющего обмотку-9 возбуждения р подключенную к источнику переменного тока Uj. При этом через контакты К2 пускового реле Р2,в положении 2-2 к усилителю б подключен источник переменного тока U. Двигатель 8 кинематически связан с редуктором 10f выходной вал 11 которого связан с МВТ 1. В цепь питания обмотки 2 возбуждения МВТ 1 включены контакты К1 релейного триггера (РТ) 12, позволяющие при переключении контактов К1 из положения 1-1 в положение 2-2 изменять фазу питания ОВ 2 МВТ 1 на противоположную с тем, чтобы обеспечить поворот исполнительного органа 5 в том уке направлении при задании последующего углового положения. Питание на РТ 12 подается по шине питания (ШП), которая подключена к клеммам плюс и Минус источника псстоянно|о тока и д. РТ 12 имеет управляющий вход (УВ), по KOTOpobv снабжен первой дифференцирующей цепочкой, включающей в себя емкость С1 и сопротивление обмотки R первого реле, входящего в РТ 12 (не показа но). Вторая дифференцирующая цепоч .включает в себя магазин из двух емкостей С2 и СЗ и сопротивление обмотки пускового реле Р2 Rj. При этом вторая дифференцирующая цепочка соединена по входу с первой через переключатель режимов работы н два положения пЗ, причем первые контакты пЗ включены в цепь, соеди няющую С1 и РТ 12. С помсядью переключателя режимов работы на два по ложения пЗ осуществляется переключение режимов работы предлагаемой схемы. Первая дифференцирующая .цепочка соединена через кнопку запуска Кн.1 с клеммой плюс источник постоянного тока иj. По клемме минус источника Uj соединены непосредственно вторые концы обмотки реле Р2 и РТ 12 по УВ. Схема электромеханического делительного устройства для задания углоилх положений исполнительному органу patSoTaex в трех режимах. В первом режиме схема работает по двум выходным обмоткам 3 и 4 ИВТ 1 с помощью переключателя п2 с дискретностью задания угловых положений, равной р, где р - число пар полюсов. Во втором режиме схема работает по одной из обмоток, например ВСО МВТ 1 с дискретностью задания угловых положений равной р. В третьем режиме схема работает jio одной из обмоток, например ВСО МВТ 1 с дискретностью згщания угловых положений равной . Схема электромеханического делит льного устройства в первом режиме работает следующим образом. Переключатель п1 устанавливается в положение 2-2, в кнопка.запуска КН71 находится в, исходном положении (фиг. 1). Переключатель п2 устанавл вается в положение 1-6, При подаче питания на ОВ 2 МВТ 1 и следящую систему схема приходит в устойчивое положение, при котором минимальный по величине сигнал ВСО 3 соответств ет нулевой точке МВТ 1. Для задания следующего углового положения переключатель п2 устанавливается в положение 2-7 и подключа ет к входу усилителя 6 ВКО 4, сигна с которой отличен от нуля, так как ВСО и ВКО находятся в квадратуре. Сигнал ВКО 4, усиленный усилителем б, поступает на ОУ 7 двигателя 8, который вращается через редуктор МВТ 1 и исполнительный орган 5 до тех пор, пока сигнал ВКО 4 МВТ 1 не станет равным нулю, что соответству ет следующему угЛовому положению. 9 Для задания последующего углового положения переключатель п2 устанавливается в положение 3-8, подключая при этом к усилителю 6 в противофазе сигнал ВСО 3 с тем, чтобы обеспечить поворот исполнительного органа 5 в том же направлении. Этот сигнал отрабатывается следящей системой до нулевого положения МТВ 1 по ВСО 3.. Затем на следующее угловое положение подключается переключателем п2 в поло;жение 4-9 в противофазе к усилителю б сигнал с ВКО 4 для обеспечения направления поворота в ту же сторону. Сигнал ВКО 4 отрабатывается следящей системой до следуксцей нулевой точки. Далее схема в первом режиме работает в порядке указанному выие, переходя из промежуточного положения 6-10 переключателя п2 в положение 1-6. Во втором режиме схема электромеханического делительного устройства работает следующим образоЦ, (фиг. 1 и 2).. При подаче питания от источников переменного тока и, } 2 4- также и 3 схема находится в устойчивом; исходном состоянии и положение элементов схемы указано на 4«г.1. При этом предлагаемая схема приходит в устойчивое положение по следящей системе, при котором минимальный по величине сигнал выходной обмотки, например ВСО 3, соответствует нулевой точке МВТ 1 (фиг. 2 точка 1). При этом непрерывная синусоида- основная выходная ЭДС синусной обмотки 3, а пунктирнаявыходная ЭДС синусной обмотки в противофазе к основной. Стрелки иа синусоидах выходной ЗДС указывают направление изменения амплитудгл ЭДС к устсЛчивому нулевому положению следящей системы. Стрелками- и показано условное направление вращения в фазах выходной ЭДС ВСО 3 исполнительного органа 5 при задании последующего углового положения. Для задания следующего углового положения исполнительному органу 5 нажимается кнопка запуска Кн.1 и через емкость С1 первой дифференцирующей цепочки питание от источника постоянного тока Uj поступает на РТ 12, который опрокидывается и его контакты К1 устанавливаются в положение 1-1, переворачивая фазу питания ОВ 2 МВТ 1 для обеспечения поворота исполнительного органа 5 в одном направлении, например, вправо (фиг. 2). При этом ЭДС ВСО 2 меняет фазу на противоположную первоначальной (на фиг. 2 изображена пунктирной линией). Тогда нулевое положение (фиг. 2) является неустойчивым и одновременно при нажатии кнопки 5 запуска Кн.1 питание от источника Uj через емкостьС2 второй диффере циальной цепочки подается на пуско вое реле Р2, которое срабатывает и кратковременно подключает своими контактами в положение 2-2 источник переменного тока и к усилите,лю б. Длительность срабатывания пускового реле Р2 и соответственно длительность импульса сдвига t от источника и .(заштрихованные прямоуголь НИКИ на фиг. 2) не должна превышать времени t отработки следящей системой до следующего нулевого положения. Поэтому , t) что достигается во второй дифференцирующей цепочке выбором величины емкости С2f так как время ее заряд есть время убывания тока. Реле Р2 находится под током только в течение заряда емкости С2, пока ток текущий по обмотке реле Р2, не становится меньшим по величине, чем ток срабатывания реле Р2. Реле Р2 приходит в исходное состояние, при котором его контакты К2 устанавливаются в исходное положение 1-1. Причем время заряда емкости прямо пропорционально ее величине. На диаграмме (фиг. 2) этот процесс показан в виде перехода из точ ки 1 в точку 2 по синусоиде выходной ЭДС МВТ 1, когда двигатель поворачивается на некоторый угол oi,,, пропорциональный времени сдвигающего икшульса t.,, проходящий через усилитель 6 на обмотку 7 управления При установлении контактов К2 реле Р2 в исходное положение 1-1 на ОУ 7 двигателя 8 поступает усиленное усилителем б напряжение ВСО 3, пропррциоиальное угловому положению ot дат 1 Сточка 2 на фиг. 2). Напря жение с ВСО 3 отрабатывается следяшей- системой до следующего нулевого положения угла в точке 3 (фиг, 2), которюе является устойчивым. Для задания следующего углового положеиия схема работает аналогично изложенному выше, с той лишь разницей, что при нажатии кнопки запуска Кн.1 релейный триггер опрокиды вается и его контакты К1 устанавливаются в положение 2-2 (на фиг.2 непрерывная синусоида от точки 3 до точки 5), тем самым обеспечивает ся направление вргицения исполнитель ного органа 5 в ту же сторону. В третьем режиме схема работает следуклцим образом. При подаче питания от источников переменного тока и, UjH U а так U- схема находится в устойчивом исходном состоянии и положение элемен тов схемы указано на фиг.1. Для обеспечения работы схемы а третьем режиме переключатель пЗ устанавливается в положение контактов 2-2. 9 При этом выключается из работы РТ 12 с первой дифференциальной цепочкой, аво второй дифференциаль-, ной цепочке подключается емкость СЗ. Так как в третьем режиме необходимо задание угловых положений.через одну нулевую точку ВСО 3, то сдвигающий импульс с длительностью (фиг.3) / должен быть больше, чем длительность тработки to следящей системой следующего углового положения. И oujjtit; b(j. Таким образом, 2t Q ty, и не требуется при этомизменение фазы ЭДС.ВСО 3, На фиг. 3 аналогично стрелками на синусоиде представлено направление изменения амплитуды ЭДС к устойчивому нулевому положению следящей системы и условное направление вращения исполнительного органа 5 в фазах выходной ЭДС ВСО 3. Условие 2tp Ч достигается выбором величины емкости СЗ аналогичновыбору емкости С2, Тогда при нажатии кнопки запуска Кн.1 пусковое реле Р2 срабатывает в течение времени заряда ем.кости СЗ, а следящая система отрабатывает им-пульс сдвига, поступающий от источника переменного, тока U. через контакты К2 рвле Р2 (положение контактов 2-2) и усилитель-6 на ОУ 7 двигателя 8. При этом исполнительный орган 5 с МВТ 1 повернется на некоторый угол cL, соответствующий точке 2 на синусоиде выходной ЭДС (фиг. 3), и далее следящая система отрабатывает выходную ЭДС до нулевого положения 4. Далее работа схемы электромеханического делительного устройства в третьем режиме происходит аналогично изложенному. Таким образом,предлагаемая схема позволяет путем нгокатия кнопки запуска осуществлять автоматически задание угловых положений исполнительному органу, что снижает трудоемкость, сокращает время задания угловых положений и исключает возможные ошибки оператора. Кроме того, как третий, так и второй работы в схеме с точки зрения управления работой электромеханического делительного устройства -идентичны и не требуют дополнительных переключений (в отличие от прототипа) при переходе с дискретности задания угловых положений на . Это достигается за счет подбора емкости во второй дифференцирующей цепочке, вследствие чего может быть обеспечена любая дискретность задания Р , Р углового положения, например Т и т.д. Схема является более помехозащищенной, так как управление фазой ЭДС выходной обмотки производится на обмотке возбуждения, где. сигнал помехи на 2-3 порядка меньше основного Напряжения питания, что не приводит кроме того, к погрешности следящей системы (в прототипе коммутации управляющим переключателем осуществляется на выходной обмотке МВТ и амплиту да сигнёша помехи соизмерима с ампли тудой выходной ЭДС, что приводит к появлению ошибки). Следовательно, основными преимуще ствакм предлагаемой схем, ;являются: простота управления заданием угловых положений, которая достигнута за счет применения устройства управления, осуществляющего автоматическое задание угла следящей системой, Для Гчего необходимо лишь нажатие кнопки запуска сокращение времени задания угловых положений исполни- . тельному органу в несколько раз за счет замены ручного переключения по нескольку раз автоматическим при однократном нажатии кнопки запуска и перехода на другой режим работы; снижение трудоемкости задания угловых положений путем замены ручного управления несколькими переключениями на однократное нажатие кнопки запуска и автоматического управления работой следящей системы; устранение субъективных ошибок оператора за счет автоматизации процесса управления работой предлагаемой схемы; снижение уровня погрешности следящей системы за счет осуществления управления изменением фазы выходной ЭДС МВТ на его обмотке возбуждения. Схема электромеханического делительного устройства предназначается для использования в народном хозяйстве для изготовления большого числа шлицов, канавок и отверстий, требующих высокой точности по их угловому расположен.ию на фрезерных, сверлильных и шлифовальных станках. Это позволит повысить производительность труда и снизить трудоемкость, например, при изготовлении зубцовой зоны многополюсных датчиков угла, многополюсных ВТ и высокоточных зубчатых колес. .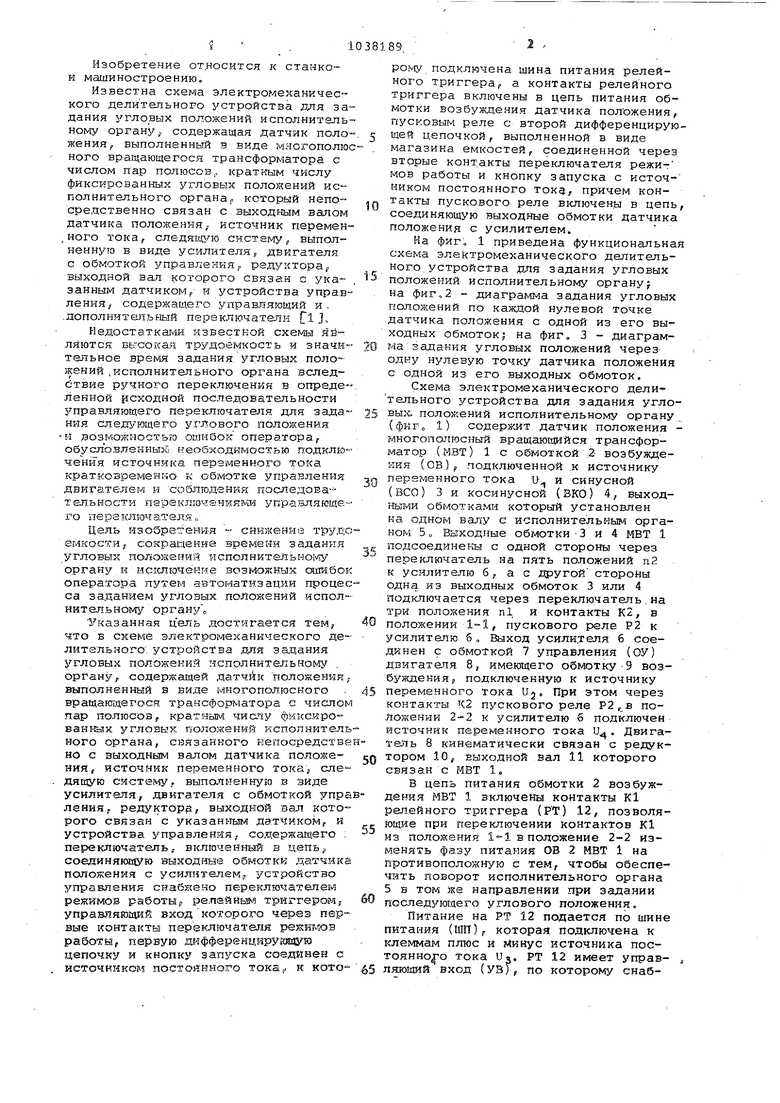
| название | год | авторы | номер документа |
|---|---|---|---|
| Схема электромеханического делительного устройства для задания угловых положений исполнительному органу | 1980 |
|
SU965721A1 |
| Прибор для контроля несимметрии расположения зубцов магнитопровода электрической машины | 1981 |
|
SU1018065A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Прибор для контроля несимметрии расположения зубцов магнитопровода электрической машины | 1980 |
|
SU936246A2 |
| Фазовая следящая система | 1974 |
|
SU552587A1 |
| Устройство для токовой защиты электроустановки | 1990 |
|
SU1777195A1 |
| Устройство для измерения погрешности многополюсного датчика угла | 1977 |
|
SU726630A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ КОМПЕНСАТОРА РЕАКТИВНОЙ МОЩНОСТИ | 1970 |
|
SU259494A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ РАЗЛИВКИ СТАЛИ | 1973 |
|
SU364387A1 |
| Устройство управления электроприводом | 1983 |
|
SU1161920A1 |
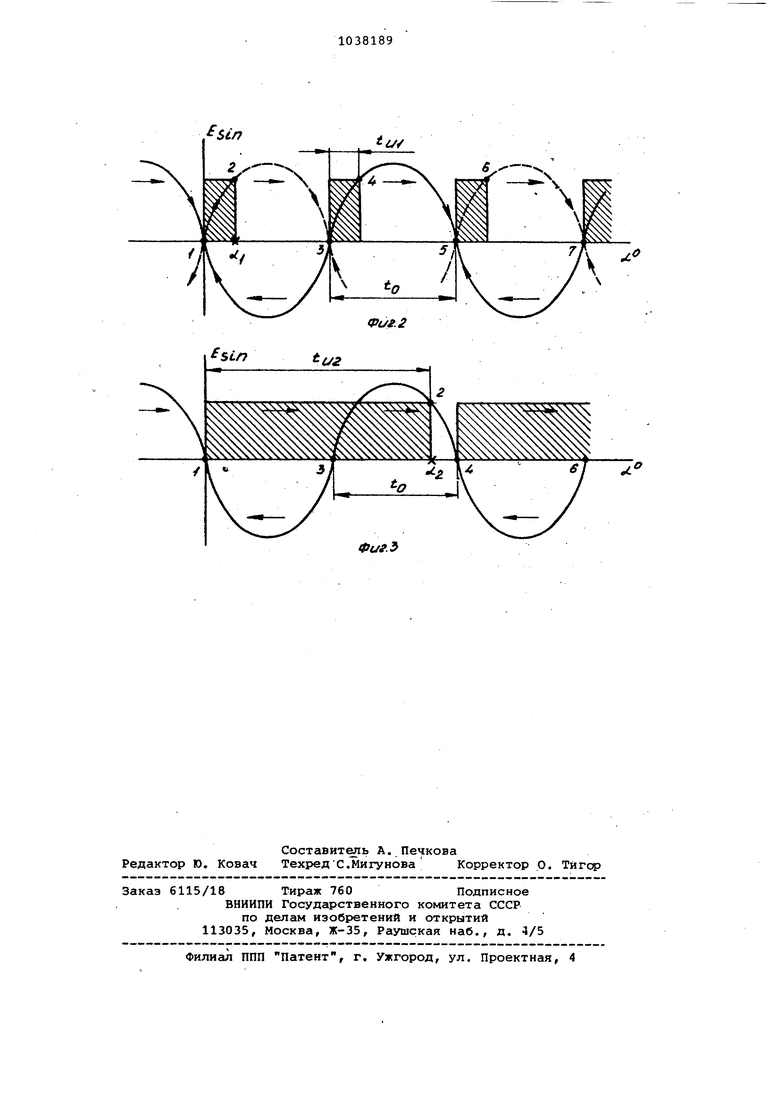
СХЕМА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДЕЛИТЕЛЬНОГО УСТРОЙСТВА ДЛЯ ЗАДАНИЯ УГЛОИ1Х ПОЛОЖЕНИЙ ИCПOЛHИTEЛЬHO У ОРГАНУ, содержагцая Датчик положения, выполненный в виде многополюсного вращающегося трансформатора с числом пар полюсов, кратным числу фиксированных угловых положений исполнительного органа, связанного непосредственно, с выходным валом датчика положения, источник переменного тока, следящую систему, выполненную в виде усилителя, двигателя с обмоткой управления, редуктора, выходной вал которого сйязан с указанным датчиком, и устройства управления, содержащего. переключатель, включенный в цепь, соединяющую выходные обмотки датчика положения с усилителем, о т л и чающаяся тем, что, с целью снижения трудоемкости, устройство управления снабжено переключателем режимов работы, релейным триггером, управляющий вход которого через первые контакты .переключателя режимов работы, первую дифференцирующую цепочку и кнопку запуска соединен с источником постоянного тока, к которому подключена шин.а питания релейноготриггера, а контакты релейного триггера включены в цепь питания обмотки возбуждения датчика положения, пусковым реле с второй дифферён-g цирующей цепочкой, выполненной в ви- (Л де магазина емкостей, соединенной через вторые контакты переключателя режимов работы и кнопку запуска с источником постоянного тока, причем контакты пускового реле включены в цепь, соединяющую выходные обмотки датчика положения с усилителем. со 00 оо со
fsLn 7 Фа.2 ifuf.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке №2945464/08,кл.В 23 Q 17/02 | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
