1
Изобретение относится к электрическим машинам, конкретно - к устройствам контроля информационных микромашин типа вращающихся трансформаторов (ВТ), применяемых в качестве датчиков передачиfугла для автоматических приборов и следящих систем.
Известны устройства для измерения погрешности многополюсных датчиков угла, содержащие механизмы задания угла, приемник в виде двухполюсного вращающегося трансформатора, следящую систему и шкалу 1.
Наиболее близким к предлагаемому по технической сущности и достигаемаму результату является устройство для измерения погрешности мно1Ч}полюсного датчика угла, содержсццее механизм задания углов с валом для установки ротора проверяемого датчика, приемник в виде двухполюсного вращающегося трансформатора, обмотка ротора которого подключена к блоку измерения, электромеханическую шкалу отсчета погрешности, размещенную на вгшу исполнительного двигателя, механическую передачу, один из входов которой предназначен для соединения с вгшом ротора датчика. Статор проверяемого датчика установлен с возиожностью поворота и кинематически связан с шкалой отсчета погрешности, а в качестве блока измерения использован нуль-индикатор 2.
Недостатком известных устройств является малая точность из-за наличия ручной операции разворота статора ВТ,, что,кроме того, усложняет токоподвод к ВТ.:
10
Цель изобретения - повышение точности.
Указанная цель достигается тем, что механическая передача выполнена в виде дифференциала, ко второму вхо15ду которого подсоединен вал .злектромеханической шкалы, а выход рлока измерения подключен к вХоду исполдительного двигателя. .
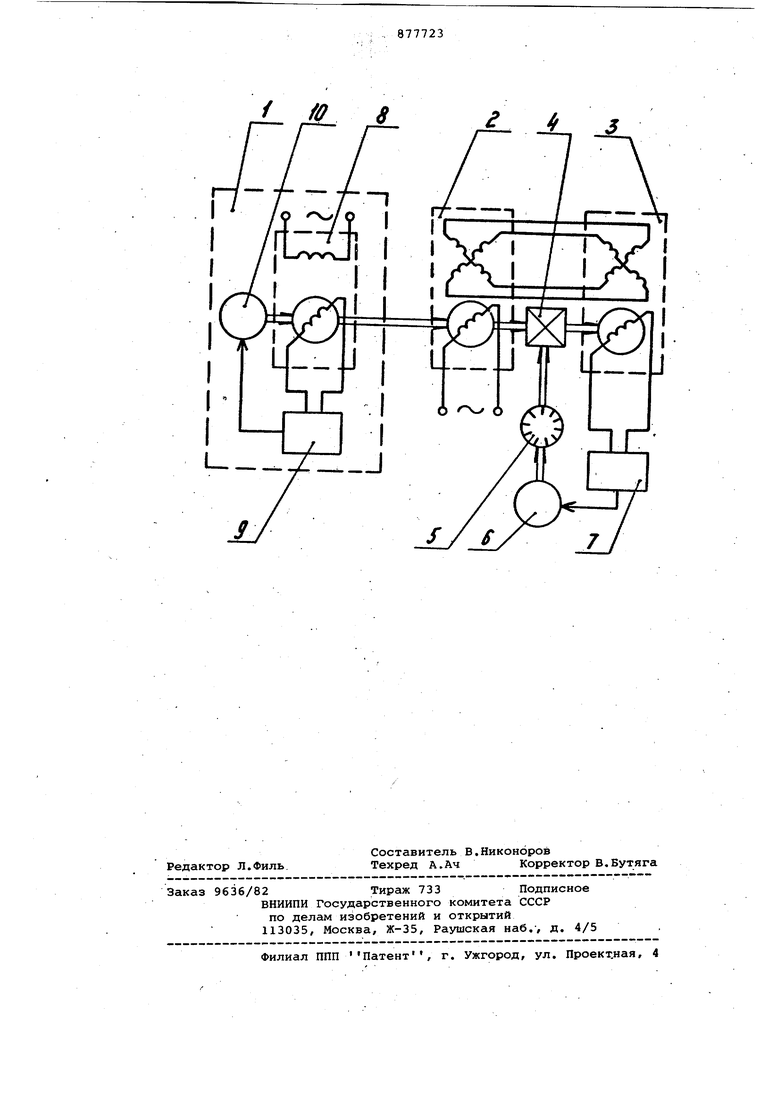
На чертеже изображена принципиаль20ная схема устройства.
Устройство содержит механизм 1 задания углов, на валу которого установлен ротор контролируемого датчика 2, двухполюсный ВТ - приемник 3, диф25ференциал 4, злектромеханическую шкалу 5 отсчета погрешности, двигатель б и блок 7 измерения в виде усилителя. Обмотки синхронизации контролируемого датчика 2 и двухполюсного прием30ника 3 соединены между собой. Один вход дифференциала. 4 связан с валом механизма 1 задания углов, второй вход - со шкалой 5 отсчета погрешивстей и с ротором двигателя 6/ а выход - с ротором двухполюсного приемника 3. Выходная обмотка двухполюсного приемника 3 соединена со входом усилителя 71 которого соединен с обмоткой управления двигателя 6. Кинематическая цепь, соединяющля вал механизма 1 згщания узлов кротор двухполюсного приемника 3/имеет передаточное отношение, равное Ч1|слу К , где К - отношение углов поворота приемника 3 и датчика 2. Ме ханизм 1 состоит из многополюсной электромеханической шкгшы 8 коммути рующего устройства 9 с усилителем и исполнительного двигателя 10. С помощью коммутирующего устройст ва 9 по минимальным значениям ЭДС электромеханической шкала 8 с помощь двигатбля 10 задают очередные углы поворота ot,; контролируемого датчика 2. Одновременно через дифференциал 4 задаются углы поворота k р -ротору приемника З. Углы поворота ротора датчика определяют в соответствии с. формулой . -| - полюсное деление датчи 2р р - число пар полюсов датчика;п и 1с - целые числа; ,2,3 - угол поворота приемник 3 при ,причем вёлич ны п и fi,f выбирают из условий, чтобы углы и были кратны единичному углу поворота делительного устройства, и углы d, не были кратны периоду погрешности проверяемого дат чика 2. Поэтому период погрешности проверяемо го датчика 2 должен быть известен. При наличии погрешности у датчика 2 на выходной обмотке приемника 3 возникает ЭДС рассогласования, побтупающая через усилитель 7 на обмотку управления двигателя 6, который разворачивает ротор приемника 3 до тех пор, пока ЭДС рассогласования не станет равной нулю. Углы noBOpota, измеряемые по шкале 5, являются погрешностями контролируемого датчика 2 . При проверке датчика с числом пар полюсов , на нем задают углы через 20, а на приемнике 3 - через 40. При этом передаточное отношение редуктора равно , а число полюсов электромеханической шкалы 8 равно 36. Предлагаемое устройство позволяет повысить точность измерения благодаря автоматизации процесса измерения. Формула изобретения Устройство для измерения погрешности многополюсного датчика угла, содержащее механизм задания углов с валом для установки ротора проверяемого датчика, приемник в: виде двухполюсного вращающегося трансформатора, обмотка ротора которого подключена к блоку измерения, электромеханическую шкалу отсчета погрешности, регулируемую на валу исполнительного двигателя механическую передачу, один из t входов которой предназначен для соединения с валом ротора д(атчика, отличающееся тем, что, с целью повышения точности,механическая передача выполнена в виде дифференциала, ко второму входу которого подсоединен вал электромеханической шкалы, а выход блока -измерения подключен к входу исполнительного двигателя. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке 2497400/24-07, кл. Н 02 К Д4/Оа, 1977. . 2. Ахметжанов А.А; Высокоточные системы передачи угл& автоматических устройств1м,-Л.,Энергия, 1975, с. 265,рис,1.5.
/ /О
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения погрешности многополюсного датчика угла | 1977 |
|
SU726630A1 |
| Поворотное устройство | 1980 |
|
SU898484A1 |
| Устройство для отсчета угловых положений вала | 1975 |
|
SU627498A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Устройство для дискретного заданияуглОВ пОВОРОТА ВАлА | 1979 |
|
SU824257A1 |
| ПОВОРОТНОЕ УСТРОЙСТВО | 1972 |
|
SU421021A1 |
| Способ контроля погрешности вращающегося трансформатора | 1989 |
|
SU1653084A1 |
| Поворотное устройство | 1985 |
|
SU1332259A1 |
| Способ контроля многополюсного вращающегося трансформатора | 1988 |
|
SU1647787A1 |