1
Изобретение относится к электрическим машинам, а именно к устройствам контроля информационных микромашин типа вращающихся трансформаторов (ВТ), применяемых в качестве датчиков передачи угла для автоматических приборов и следящих систем.
Известны устройства для проверки точности ВТ и следящих систем, содержащие делитель напряжения, нуль-индикатор, ВТприемник и датчик 1. При проверке ВТ его подключают к ВТ-датчику и поворотом ротора проверяемого ВТ согласуют трасформаторную дистанционную передачу. Ошибка ВТ-приемника определяется как разность угла поворота ротора и угла, заданного на делителе.
Недостатком этого устройства является малая точность.
ч
Известны также устройства для измерения погрешности многополюсного датчика угла, содержащие механизм задания угла, приемник в виде двухполюсного вращающегося трансформатора, следящую систему и щкалу отсчета погрешности 2,.
Данное устройство по технической сущности и достигаемому результату наиболее близко к изобретению.
Недостатком известного устройства является сложность конструкции и эксплуатации.
Целью изобретения является упрощение конструкции устройства и его эксплуатации.
Это достигается тем, что вал механизма задания углов кинематически связан с ротором приемника, статор которого установлен с возможностью поворота и кинематически связан со шкалой отсчета погрешности, устройство снабжено нуль-индикатором, подключенным к обмотке ротора приемника.
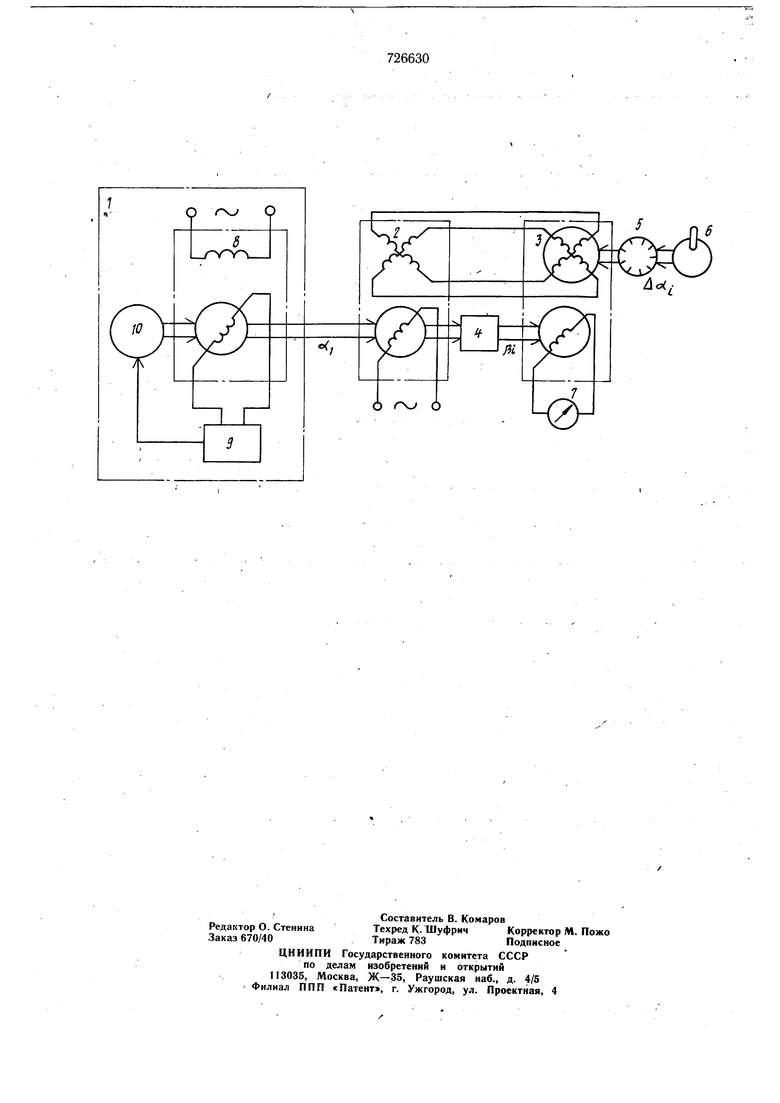
На чертеже изображена принципиальная схема устройства.
Оно содержит механизм 1 задания углов, установленный на одном валу с проверяемым датчиком 2, двухполюсный ВТ-приемник 3, редуктор 4, щкалу 5 отсчета погреш,ности, прибод 6 поворота статора приемника, а также нуль-индикатор 7. Обмотки синхронизации проверяемого датчика 2 и двухполюсного приемника 3 соединены между собой. Шкала 5 сочленена с привоДОМ 6 и статором приемника 3 и измеряет угол его поворота, причем отградуирована в ценах поворота датчика. Нуль-индикатор 7 установлен в цепи выходной обмотки приемника 3. Редуктор 4 установлец в кинематической линии, связывающей роторы проверяемого многополюсного датчика 2 и двухполюсного приемника 3, и имеет передаточное отношение, равное числу К, где К - отношение углов поворота приемника и датчика. Механизм 1 состоит из многополюсной электромеханической шкалы 8, коммутирующего устройства 9 с усилителем и исполнительного двигателя 10. С помощью коммутирующего устройства 9 по минимальным значениям ЭДС электромеханической щкалы 8 с помощю двигателя 10 задают очередные углы поворота а I проверяемого датчш а 2. Одновременно благодаря наличию кинематической связи через редуктор 4с передаточным отношением, равным К, :задаются углы поворота ротора приемника 3. Углы поворота ротора датчика определяют в соответствии сАормулой а 2г п+ , где г -| - полюсное деление датчика, р - число пар полюсов датчика, п и k - целые числа, i 1; 2; 3..., - угол поворота приемника при i 1, причем величины п и выбирают из условий, чтобы углы а/ и Д/ были кратны единичному углу поворота делительного устройства и углы ai не были кратны периоду погрешности проверяемого датчика. Поэтому период погрешности проверяемого датчика, должен быть известен. При наличии погрешностей на выходной обмотке приемника 3 возникает ЭДС рассогласования, регистрируемая прибором 7. Одним из приемов измерения погрешностей является сведение к минимуму показания прибора 7 поворотом статора приемника 3 с помощью привода 6. Углы пйвброта, измеряемые по шкале 5, являются п6греш1 остями проверяемого датчика. Возможно измерение погрешности непосредственно по прибору 7. При проверке датчика с пар по-, люсов Р 128 на нем задаютуглы через 20°, а на приемнике 3 - через 40°. При этом передаточное отношение редуктора К равно 2, а число полюсов электромеханической шкалы 8 равно 36.- . При указанных значениях конструкция прибора получается весьма компактной, и он обеспечивает автоматизированное измерение погрешностей высокочастотных многополюсньгх датчиков, исключая необходимость использования дефицитных и дорогостоящих оптических приборов. Время контроля датчиков по предлагаемому способу (с учетом времени установки и съема проверяемых изделий) значительно уменьшается (примерно в 10-20 раз), что особенно важно в серийном производстве. Формула изобретения Устрой.с.тво для измерения погрешности многополюсного датчика угла, содержащее механизм задания углов с валом для установки ротора датчика, приемник в виде двухполюсного вращающегося трансформатора и щкалу Отсчета погрешности, отличающееся тем, что, с целью упрощения конструкции и эксплуатации, .вал механизма задания углов кинематически связан с ротором приемника, статор которого установлен с возможностью поворота и кинематически связан со шкалой отсчета погрешности, устройство снабжено нуль-индикатором, подключенным к обмотке ротора приемника. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 392589, кл. Н О 2К 24/00, 1971. 2.Ахметжанов А. А. Высокоточные системы передачи угла автоматических устройств, М.-Л.,Энергия, 1975, с. 265.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения погрешности многополюсного датчика угла | 1980 |
|
SU877723A1 |
| Поворотное устройство | 1985 |
|
SU1332259A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Устройство для проверки электрических машин | 1981 |
|
SU976467A1 |
| Устройство для дискретного заданияуглОВ пОВОРОТА ВАлА | 1979 |
|
SU824257A1 |
| Способ контроля погрешности вращающегося трансформатора | 1989 |
|
SU1653084A1 |
| Устройство для проверки решающих электрических машин | 1978 |
|
SU736156A1 |
| Поворотное устройство | 1985 |
|
SU1254442A1 |
| Устройство для измерения угла поворота | 1984 |
|
SU1226036A1 |