Изобретение относится к оптическому приборостроению для биологии, а более конкретно к техническим устройствам, применяемым для исследования подвижности животных, и может быть использовано, в частности, для определения двигательной активности и гидродинамических СВОЙСТВ планктона в гидробиологии.
Известно устройство для регистрации подвижности животных, основанное на использовании электромагнитных датчиков, расположенных под поверхностью, по которой перемеща-ется животное. При этом изменяется состояние того датчика, который находится непосредственно под животным l .
Недостатком такого устройства являются сравнительно большие размеры датчиков, что не позволяет использовать, их для.исследования.подвижных и небольших по величине плакитонных животных.
Наиболее бл 1зким к предлагаемому по технической сущности .является устройство для исследования подвижности животных, содержсицее осветительную систему, прозрачную кювету для размещения исследуемых животных, набор фотодатчиков, а также последовательно соединенные с фотодатчиками электронные системы усиления, счетно-вычислительный блок и регистрирующее устройство. В этом устройстве фотодатчики, выполненные в виде фотосопротивлений, равномерно размещены на плоскости, над которой установлен точечный источник света.
Животное перемещается по поверхности мозаики фотодатчиков, последовательно затеняя их. По изменению силы тока соответствующих датчиков вычислительное устройство строит траекторию движения животного 2 .
Однако известная конструкция не позволяет осуществлять исследования по трем координатам. При этом даже использование второй мозаики фотодатчиков, плоскость которой перпендикулярна плоскости первой, не обеспечивает точной трехмерной регистрации, поскольку при удалении животного от поверхности, мозаики его проекция на эту поверхность от точечного источника будет затенять несколько датчиков.
Кроме того, устройство требует большого числа датчиков и сложных электронных схем коммутации.
Цель изобретения - обеспечение возможности точной регистрации перемещения животных по трем координатам при упретдении конструкции устройства.
Поставленная цель достигается тем, что в устройство для исследова
ния подвижности животных, содержа-щее осветительную-систему, прозрачную кювету для размещения исследуемых ж ивотных, набор фотодатчиков, а также последовагельно соединенные с фотодатчиками электронные системы усиления, счетно-вычислительный блок и регистрирующее устройство, введены три объектива с взаимно перпендикулярными оптическими осями пересекающимися в центре кюветы, и три стопы фоклинов, входные торцы которых перпендикулярны указанным осям и оптически сопряжены объективми с центром кюветы, а фотодатчики выполнены в виде фотопотенциометров светочувствительные поверхности котрых примыкают к выходным торцам стоп фоклинов, ориентированным также взаимно перпендикулярно.
На чертеже представлена схема предлагаемого устройства, Устройство для исследования подвижности животных включает три объектива 1-3, оптические оси V., у.и Z которых взаимноперпендикулярны и пересекаются в центре прозрачной кюветы 4 для размещения исследуемых животных, а также три стопы фоклинов 5-7, входные торцы которых перпендикулярны осям х, у, 2 и оптически сопряжены объективами 1-3 с центром кюветы 4. Осветительная система образована источником 8 света, конденсором 9 со светофильтром
10и объективом 2, в фокальной плоскости которого установлено наклонное зеркало 11. Используемые в устройстве фотопотенциометры 12-14 примыкают своим1| светочувствительнымк поверхностями к выходным торцам стоп, фоклинов 5-7. При этом указанные торцы взаимно перпендикулярны
и соответственно параллельны осям 2, , X и у. С фотодатчиками 12, 13 и 14 последовательно соединены электронные системы 15, 16 и 17 усиления, счетно-вычислительный блок 18 и регистрирующее устройство 19. Габариты стоп фоклинов 5-7, число фоклинов в стопе и величина проме-. жутка между ними определяются по законам геометрической оптики с учетом габаритов кюветы 4, размеров животного, заданной точности определения его координат, а также параметров объективов 1-3. Конусность фоклинов определяется условием Шварцшильда.
Предлагаемое устройство работает следующим образом.
Кювета 4 OJ:;вeщaeтcя осветительной системой элементов 8, 10, 9,
11и 2. Объективы 1-3 фокусируют рассеянное исследуемым животным излучение на входные торды стоп фоклинов 5-7. Вследствие расфокусировки
и многократных отражений на гранях
фоклинов излучение попадает на фотопотенциометры 12-14 в виде светящихся линий. При этом положение линии в каждом из трех случаев соответствует координате животного по одной . Поскольку фотопотенг циометры являются координато-чувствительными приемниками, датчик 12 вьщает информацию о положении животного вдоль оси t , датчик 13 I вдоль оси X и датчик -14 - вдоль ;оси у. Датчики 12-14 работают в ре,жиме насьоцения. Сигналы с этих датчиков поступают на усилители 15-17, обрабатываются счетно-вычислительным блоком 18 и п одаются на регистрирующее устройство 19, например графопостроитель, в качестве координат животного.
Таким образом, изобретение обеспечивает возможность точной регистрации движения животного по трем координатам при упрощении конструкции устройства. В то же время по сравнению с базовые объектом, в качестве которого выбрана скоростная киносъемка , предлагаемое устройство позволяет регистрировать движение животного длительное время без учас0тия оператора, к оптическим системам предъявляются невысокие требования по исправлению аберраций, исключается использование серёбросодержащих материалов, что снижает стоимость исследований. Устройство позволяет проводить наблюдение в условиях, близких к естественным, что повышает ценность информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ МИКРООБЪЕКТА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2525152C2 |
| Микрофотометр | 1975 |
|
SU826201A1 |
| ОПТИЧЕСКИЙ КОРРЕЛЯТОР ДЛЯ ОПРЕДЕЛЕНИЯ РАССОГЛАСОВАНИЯ | 1971 |
|
SU305493A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ СТОП И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2177249C2 |
| Многоходовая оптическая кювета | 1976 |
|
SU737790A1 |
| СПЕКТРОСКОП | 2010 |
|
RU2457446C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПОЛЯ МИКРООБЪЕКТОВ С ЛУЧЕВЫМ ВОЗДЕЙСТВИЕМ (ВАРИАНТЫ) | 2002 |
|
RU2199729C1 |
| ТРЕХКООРДИНАТНЫЙ МАНИПУЛЯТОР ГРАФИЧЕСКОЙ ИНФОРМАЦИИ "ЧЕРЕПАХА" | 1997 |
|
RU2123201C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ МНОГОКАНАЛЬНОГО ЛАЗЕРА В ЗАДАННЫЕ ТОЧКИ МИШЕНИ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601505C1 |
| Способ исследования распределения параметров рассеивающих частиц | 1989 |
|
SU1642326A1 |
УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПОДВИЖНОСТИ ЖИВОТНЫХ, содержащее осветительную систему, прозрачную кювету для размещения исследуе-/ мых ЖИВОТД1ЫХ, набор фотодатчиков, а также последовательно соединенные с фотодатчиками электронные системы усиления, счетно-вычислительный блок и регистрирующее устройство, о т л и ч а ю щ,е е с я тем, что, с целью обеспечения возможности точной регистрации перемещения животных по трем координатам приупрощении конструкции устройства, в него введены три объектива с. взаимно перпендикулярными оптическими осями,; пересекающимися в центре кюв.еты, и три стопы фоклинов,. входные торцы которых перпендикулярны ;указанным осям и оптически сопряжены объективами с центром кюветы, -а фотодатчики выполнены в виде фотопотенциометров , светочувствительные поверхности которых примыкают к выходным торцам стоп фоклинов, -ориентированным также взаимно пер- , Лендикулярно. сд сд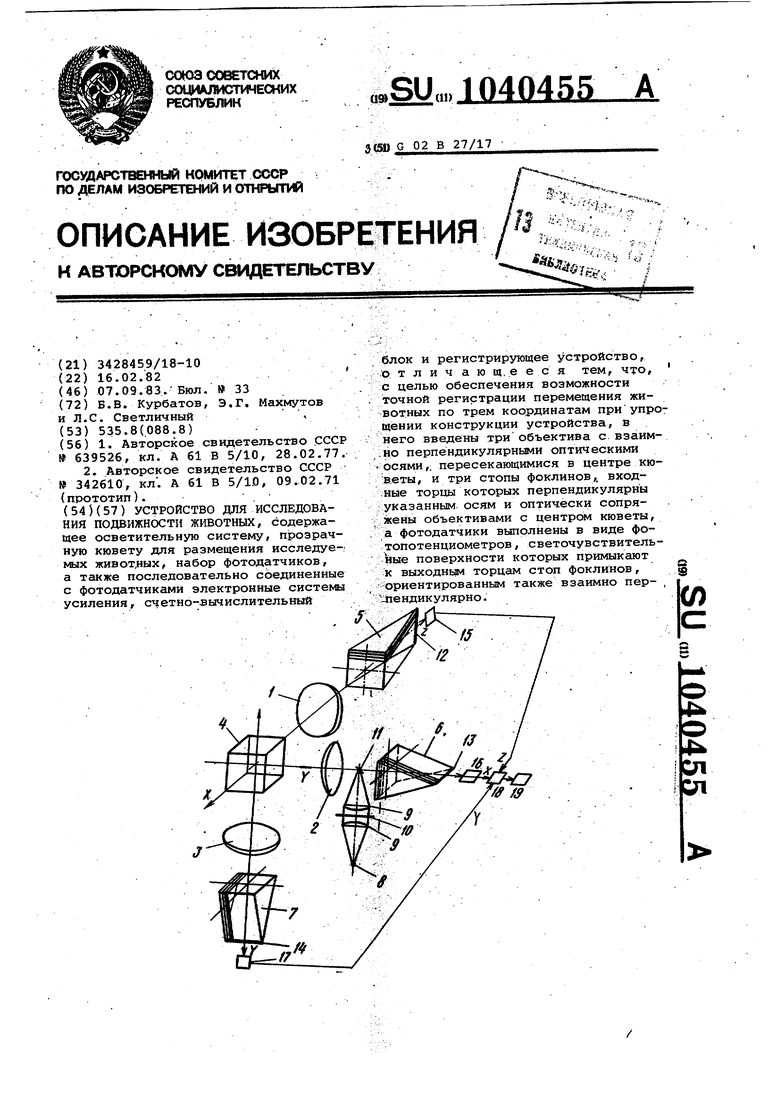
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство слежения за перемещением животных | 1977 |
|
SU639526A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПУТИ, ПРОДЕЛЫВАЕМОГО ЛАБОРАТОРНЫМИ ЖИВОТНЫМИ | 0 |
|
SU342610A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
