Изобретение относится к медицине, в частности к ортопедии и антропологии, и предназначено для определения деформации стоп при массовых профилактических осмотрах населения. Изобретение может также найти применение в обувной промышленности для определения формы колодки при конструировании колодок и обуви.
Известен способ определения формы и размеров плантарной поверхности стоп, основанный на определении величины перемещения измерительных стержней под действием давления, оказываемого весом тела человека [1]. Устройство, реализующее способ, содержит основание, снабженное измерительными стержнями с фиксаторами, и узел измерения, выполненный в виде планки с упругими пластинами, на которой расположены тензорезисторные датчики, причем планка закреплена с возможностью перемещения вдоль основания. Способ осуществляется следующим образом. Перед началом измерений производится тарировка датчиков при полном утопании измерительных стержней и в исходном положении, после чего пациент становится обеими стопами на основание с равномерной нагрузкой на обе стопы. Под действием давления, оказываемого весом тела человека, происходит утопание измерительных стержней. Для измерения величины утопания измерительных стержней планку с датчиками передвигают вдоль основания и измеряют активное сопротивление датчика, которое зависит от величины смещения стержня. Результаты измерений фиксируются на светочувствительной бумаге. По измеренной величине утопания стержней судят о форме плантарной поверхности стоп.
Недостатками этого способа, а также реализующего его устройства являются невысокое пространственное разрешение, низкая точность определения формы и размеров плантарной поверхности стопы и большие временные затраты на проведение обследования. Невысокое пространственное разрешение при определении формы стопы обусловлено тем, что число измерительных стержней приходится ограничивать и, следовательно, устанавливать стержни на сравнительно большом расстоянии друг от друга. Увеличение числа измерительных стержней приводит к существенному повышению временных затрат на обследование, которые и так весьма велики и составляют не менее 20 мин. Большие временные затраты на обследование затрудняют применение способа для массовых профилактических обследований населения. Кроме того, использование контактных способов измерения для исследования мягких тканей вносит дополнительные погрешности, обусловленные погружением стержней в исследуемую поверхность.
Известны способ компьютерной оптической топографии формы тела человека и устройство для его осуществления [2]. Способ осуществляется путем проецирования на обследуемую поверхность тела под заданным углом к этой поверхности пространственной системы эквидистантных оптически контрастных полос, видеосъемки изображения этой системы полос под углом, отличным от указанного угла проецирования, аналого-цифрового преобразования видеосигнала, введения его в устройство памяти электронно-вычислительной машины (ЭВМ) и обработку преобразованного сигнала для восстановления трехмерной модели исследуемой поверхности и получения количественных параметров рельефа обследуемой поверхности. При этом указанную систему линий предварительно проецируют под указанным заданным углом на отражающий плоский экран, который располагают за местом установки пациента относительно точки видеосъемки, осуществляют видеосъемку полученного изображения, аналого-цифровое преобразование видеосигнала и его ввод в устройство памяти ЭВМ, далее проводят обследование пациента и после ввода в устройство памяти ЭВМ видеосигнала изображения с поверхности пациента указанную обработку введенных видеосигналов осуществляют путем определения разности фаз между пространственно-модулированным видеосигналом изображения на экране и пространственно-модулированным видеосигналом изображения обследуемой поверхности пациента. Устройство для компьютерной оптической топографии, реализующее вышеописанный способ, содержит средство формирования изображения пространственной системы эквидистантных оптически контрастных полос, телевизионную камеру, средство фиксации положения пациента, электронно-вычислительную машину, снабженную средством ввода аналогового сигнала с телекамеры в устройство памяти ЭВМ, и отражающий плоский экран, установленный вертикально за средством для фиксации положения пациента.
Вышеописанные способ и устройство обеспечивают высокую точность и экспрессность определения формы исследуемой поверхности тела человека, так как позволяют оперативно получать трехмерную модель обследуемой поверхности тела. Однако данное техническое решение, предназначенное преимущественно для обследования поверхности спины, не позволяет обследовать стопы под нагрузкой собственным весом в естественном вертикальном положении человека и не обеспечивает получение трехмерной модели нагруженных стоп.
Наиболее близким к предлагаемому является способ фотометрического исследования стоп при помощи устройства, содержащего горизонтально размещенную опорную пластину с плоскопараллельной матовой рабочей поверхностью, выполненную из органического стекла, систему зеркал, включающую зеркало, установленное снизу опорной пластины под углом 45o к ее рабочей поверхности, экраны с разметкой, осветительные лампы и блок регистрации изображения, выполненный в виде фотокамеры [3]. Способ включает в себя смачивание стоп водой, установку стоп на опорную пластину, матовая рабочая поверхность которой становится прозрачной в местах соприкосновения с намоченными стопами, регистрацию изображений (получение фотоснимков) на фоне экранов с разметкой области контакта подошвенной поверхности стоп (плантограммы), бокового наружного свода стоп и пяточной области, отраженных через систему зеркал, включающую зеркало, установленное под опорной пластиной под углом 45o к ее рабочей поверхности, определение по фотоснимкам параметров стоп, по которым судят о форме стоп под нагрузкой.
Недостатком данного способа является низкая точность определения формы стоп. Это обусловлено тем, что способ позволяет получить информацию только о контуре нагружаемых отделов стоп (плантограмму), а также изображение наружных и задних отделов стоп на фоне масштабных сеток, но не обеспечивает возможности получения трехмерной модели стоп, по которой можно точно определить размер, форму и объем подсводного пространства внутренних отделов стоп, оценка которых очень важна для определения характера деформации стоп. К тому же количественная оценка фотоснимков не автоматизирована и требует значительных временных затрат, что затрудняет применение способа при массовых обследованиях. При этом необходимость смачивания стоп создает дополнительные неудобства при обследовании пациентов.
Изобретение направлено на решение задачи повышения точности и оперативности определения формы стоп человека за счет обеспечения возможности автоматизированной трехмерной модели стоп.
Сущность изобретения заключается в том, что в способе определения формы стоп человека путем установки стоп на рабочую поверхность оптически прозрачной и горизонтально расположенной опорной пластины и регистрации отраженного в, по меньшей мере одном, размещенном под опорной пластиной и под углом 45o к ней зеркале, изображения подошвенной поверхности стоп предлагается предварительно на рабочей поверхности опорной пластины размещать калибровочную пластину с плоской матовой отражающей поверхностью, проецировать на нее под заданным углом пространственную систему оптически контрастных полос, регистрировать отраженное в зеркале изображение и получать по нему калибровочные значения в цифровом виде, после чего на подошвенную поверхность стоп, установленных на рабочую поверхность опорной пластины, также проецировать под заданным углом пространственную систему оптически контрастных полос, при этом направление регистрации должно не совпадать с направлением проецирования, а по зарегистрированным изображениям с учетом калибровочных значений восстанавливать в цифровом виде трехмерную модель подошвенной поверхности стоп и по ее параметрам судить о поверхности стоп.
При этом пространственная система оптически контрастных полос может быть спроецирована через то же зеркало.
Осевые лучи направлений проецирования и регистрации после преломления их зеркалом могут сходиться на рабочей поверхности опорной пластины, при этом угол между опорной пластиной и осевым лучом направления регистрации может составлять 90o.
Пространственная система оптически контрастных полос может быть эквидистантной.
Сущность изобретения заключается так же в том, что устройство для определения формы стоп человека, содержащее горизонтальную плоскопараллельную, выполненную из оптически прозрачного материала опорную пластину для размещения стоп на ее рабочей поверхности, установленное под ней и под углом 45o к опорной пластине, по меньшей мере, одно зеркало и блок регистрации изображения, предлагается дополнительно снабдить калибровочной пластиной с плоской матовой отражающей поверхностью, выполненной с возможностью размещения на рабочей поверхности опорной пластины, и средством для формирования изображения пространственной системы оптически контрастных полос, а выход блока регистрации изображения подключить к входу блока обработки данных через средство преобразования зарегистрированного изображения в цифровой вид.
При этом на объективах блока регистрации изображения и средства для формирования изображения пространственной системы оптически контрастных полос могут быть установлены поляризационные светофильтры.
Средство для формирования изображения пространственной системы оптически контрастных полос, блок регистрации и зеркало могут быть размещены таким образом, что преломляемые зеркалом их осевые лучи сходятся на поверхности опорной пластины, при этом осевой луч блока регистрации изображения проходит перпендикулярно к рабочей поверхности опорной пластины.
В предлагаемом изобретении предварительное размещение на рабочей поверхности опорной пластины калибровочной пластины с плоской матовой отражающей поверхностью, на которую проецируют под заданным углом пространственную систему оптически контрастных полос, регистрация отраженного в зеркале изображения и полученные по нему калибровочные значения в цифровом виде позволяют производить процесс восстановления трехмерной модели подошвенной поверхности стоп с учетом калибровочных значений и тем самым снизить систематические методические и инструментальные погрешности, вносимые оптическими приборами, а значит, снизить требования к точности их изготовления и юстировки.
Проецирование под заданным углом пространственной системы оптически контрастных полос на подошвенную поверхность стоп, установленных на рабочую поверхность опорной пластины, регистрация в цифровом виде изображения и восстановление в цифровом виде трехмерной модели подошвенной поверхности стоп по зарегистрированным изображениям с учетом калибровочных значений обеспечивают получение полного количественного описания трехмерной формы подошвенной поверхности стоп с высокой точностью и оптическим пространственным разрешением на регулярной сетке, и, тем самым, обеспечивают повышение точности определения формы стоп. При этом проецирование пространственной системы оптически контрастных полос на подошвенную поверхность стоп через оптически прозрачную опорную пластину позволяет обследовать стопы пациента в удобной для него вертикальной позе, а также оптимизировать габариты оптической схемы при реализации способа.
Проецирование пространственной системы оптически контрастных полос через то же зеркало, посредством которого регистрируется изображение, способствует упрощению способа и оптимизации габаритов оптической схемы при реализации способа.
Выбор осевых лучей проецирования и регистрации таким образом, что эти осевые лучи после преломления их зеркалом сходятся на рабочей поверхности опорной пластины, при этом угол между опорной пластиной и осевым лучом регистрации составляет 90o, позволяет совместить центры кадров проецируемого и регистрируемого изображений на рабочей поверхности опорной пластины и тем самым снизить погрешности, вносимые оптической схемой, а значит, повысить точность определения формы стоп.
Использование эквидистантной пространственной системы оптически контрастных полос позволяет упростить процесс обработки данных при восстановлении трехмерной модели подошвенной поверхности стоп.
Введение в устройство калибровочной пластины с плоской матовой отражающей поверхностью, выполненной с возможностью размещения на рабочей поверхности опорной пластины, позволяет получить калибровочные данные, учет которых в процессе восстановления трехмерной модели подошвенной поверхности стоп обеспечивает компенсацию погрешностей настройки оптической схемы и систематических погрешностей, связанных с боковым проецированием системы оптически контрастных полос, что также повышает точность определения формы стоп.
Введение в устройство средства для формирования изображения пространственной системы оптически контрастных полос и подключение выхода блока регистрации изображения к входу блока обработки данных через средство преобразования зарегистрированного изображения в цифровой вид обеспечивают получение в цифровом виде изображения подошвенной поверхности стоп с наложением пространственной системы оптически контрастных полос. Такое изображение заключает в себе полную информацию о рельефе подошвенной поверхности стоп и позволяет восстанавливать ее трехмерную модель, использование которой обеспечивает повышение точности и оперативности определения параметров стоп.
Введение поляризационных светофильтров, установленных на объективах блока регистрации изображения и средства для формирования изображения пространственной системы оптически контрастных полос, позволяет уменьшить влияние на качество регистрируемых изображений загрязнений, возникающих на рабочей поверхности опорной пластины, при ее непосредственном контакте с кожным покровом стоп, что снижает требования к чистоте рабочей поверхности опорной пластины и позволяет увеличить периоды между очистками этой поверхности.
Размещение средства для формирования изображения пространственной системы оптически контрастных полос, блока регистрации изображения и зеркала таким образом, что преломляемые зеркалом их осевые лучи сходятся на поверхности опорной пластины, при этом осевой луч блока регистрации изображения проходит перпендикулярно к рабочей поверхности опорной пластины, обеспечивает реализацию оптической схемы устройства, позволяющую регистрировать изображение подошвенной поверхности стоп через зеркало в прямой проекции без дополнительных перспективных искажений. Тем самым обеспечивается оптимальный выбор направления проецирования указанной системы полос и направления регистрации изображения системы полос, при которых центры кадров проецируемого и регистрируемого изображений совмещаются на рабочей поверхности опорной пластины, что позволяет упростить процесс калибровки и юстировки на этапе сборки и технического обслуживания устройства.
На фиг. 1 приведено устройство для реализации способа определения формы стоп человека.
На фиг. 2-5 приведены изображения, иллюстрирующие предлагаемый способ и работу устройства, его реализующего.
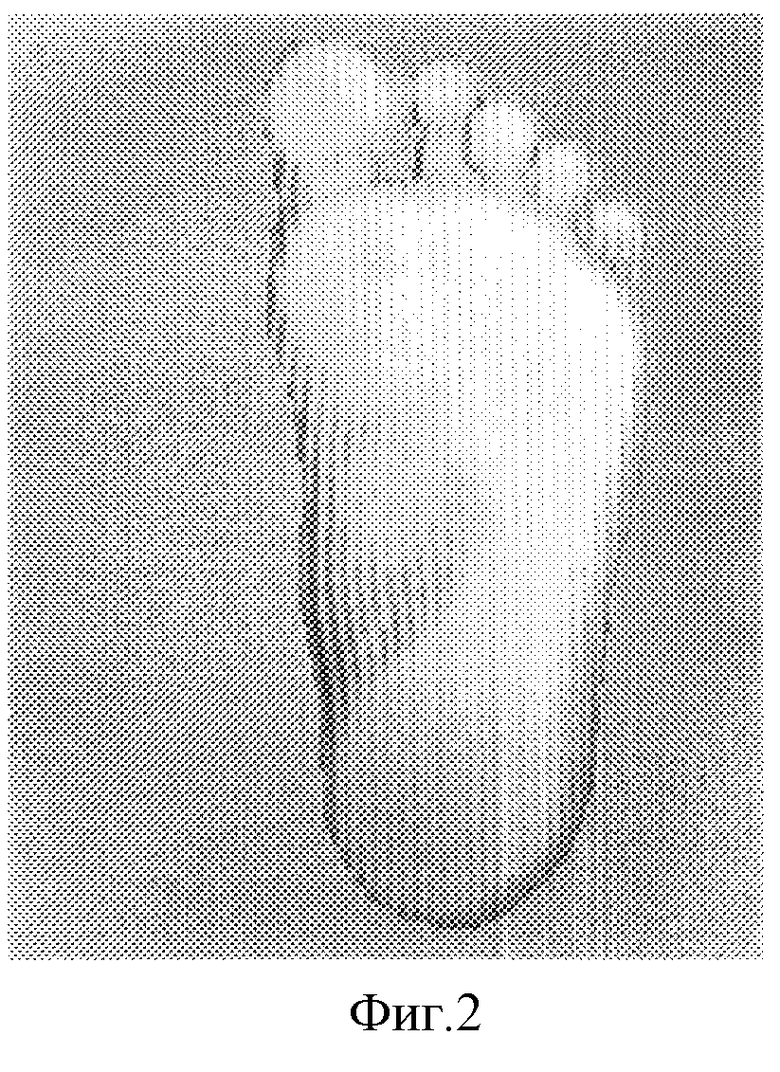
На фиг. 2 приведено изображение пространственной системы эквидистантных оптически контрастных полос одинаковой ширины, спроецированных на поверхность стоп.
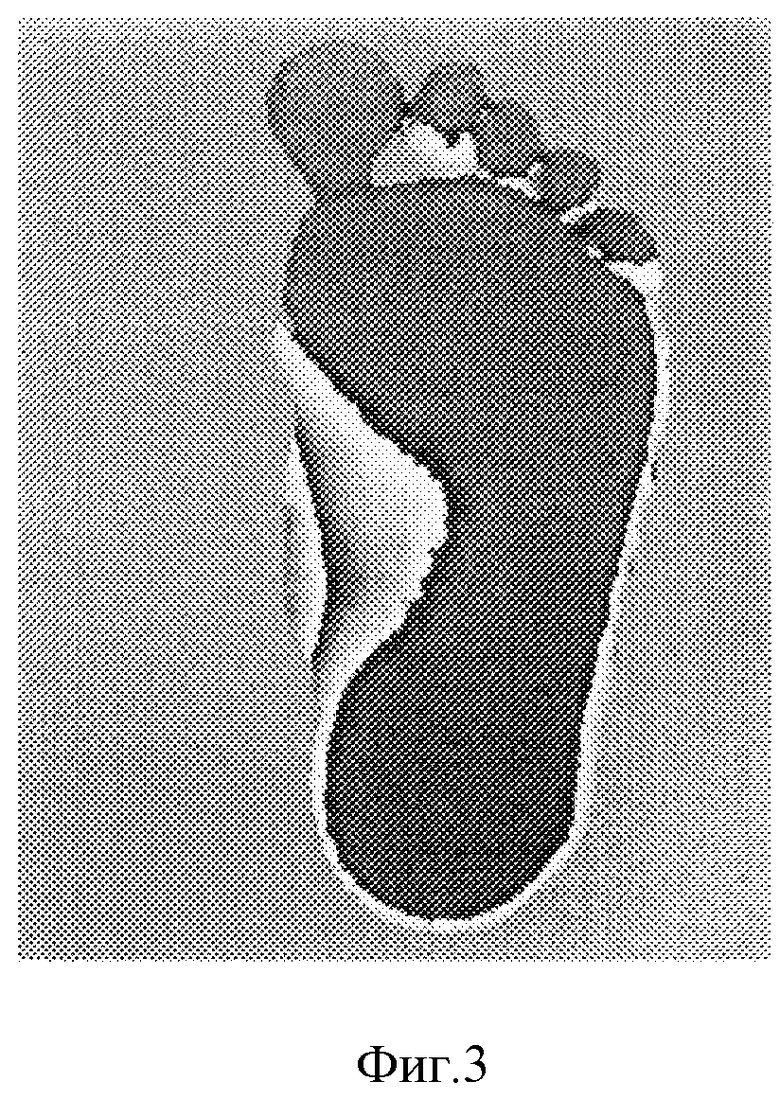
На фиг. 3 приведено изображение поверхности стопы, на котором показан фазовый сдвиг пространственной системы эквидистантных оптически контрастных полос по модулю 2π, где фаза полос представлена в виде яркости, плавно изменяющейся в пределах диапазона 2π и претерпевающей скачкообразное изменение при выходе за этот диапазон.
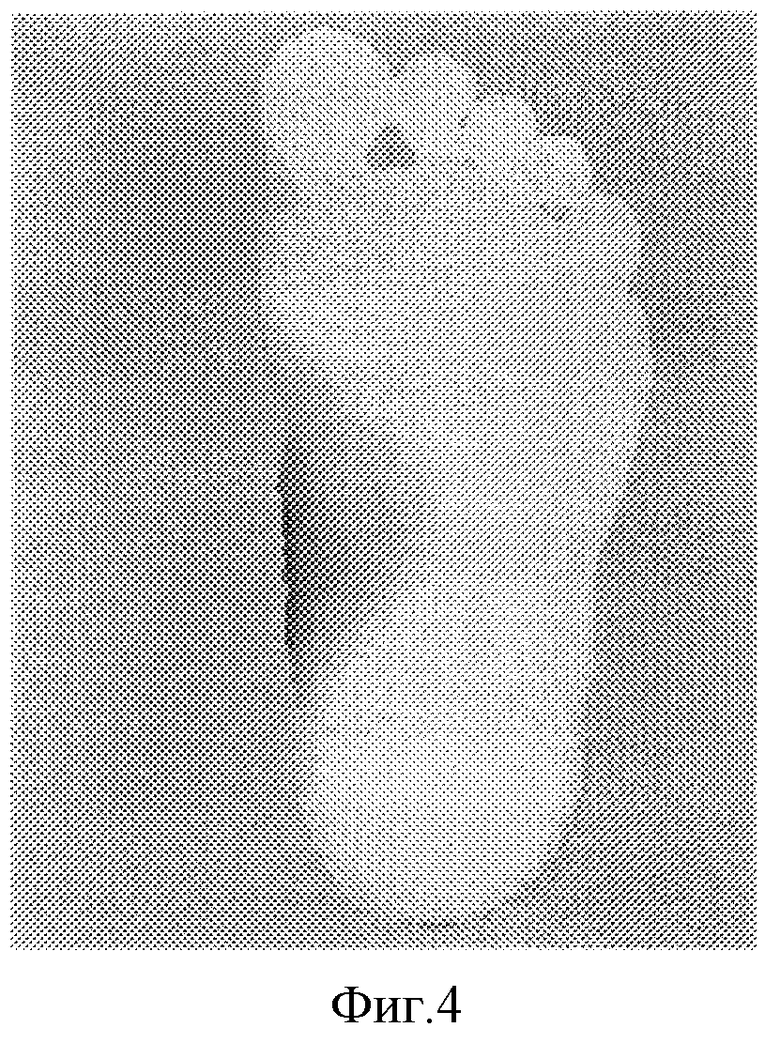
На фиг. 4 приведено изображение поверхности стопы в виде полутонового изображения, яркость которого обратно пропорциональна высоте отстояния поверхности стопы от рабочей поверхности опорной пластины. Светло-серым на фиг. 4 показана область стопы, находящаяся в непосредственном контакте с рабочей поверхностью опорной пластины.
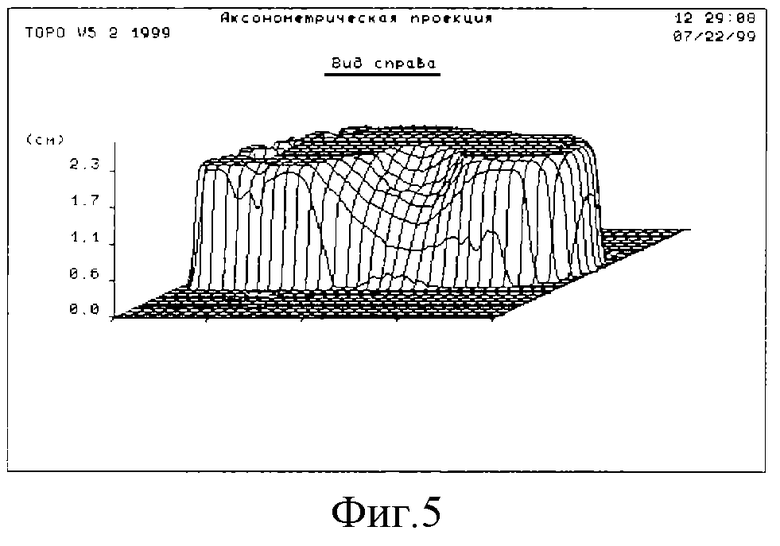
На фиг. 5 показано графическое представление трехмерной модели поверхности стопы (с обращенной вверх подошвенной поверхностью), изображенной в виде аксонометрической проекции, на которой показан ряд равноотстоящих друг от друга сечений, выполненных в двух взаимно ортогональных направлениях.
Устройство, приведенное на фиг. 1, содержит опорную пластину 1, размещенную горизонтально. Под пластиной 1 под углом 45o к ее рабочей поверхности расположено зеркало 2. Средство формирования изображения пространственной системы эквидистантных оптически контрастных полос, выполненное на основе слайд-проектора 3, и блок 4 регистрации изображения расположены таким образом, что их осевые лучи, преломляемые зеркалом 2, сходятся на рабочей поверхности пластины 1. Средство формирования изображения пространственной системы эквидистантных оптически контрастных полос содержит носитель 5 изображения пространственной системы эквидистантных оптически контрастных полос, установленный в задней фокальной плоскости объектива слайд-проектора 3. Непосредственно на объективах слайд-проектора 3 и блока 4 регистрации изображения могут быть размещены поляризационные светофильтры 6. Средство 7 преобразования зарегистрированного изображения в цифровой вид включено между выходом блока 4 регистрации изображения и входом блока 8 обработки данных. Непосредственно на рабочей поверхности опорной пластины 1 размещается калибровочная пластина 9 либо устанавливается пациент 10.
Опорная пластина 1 может, например, представлять собой оптически прозрачную в видимом спектральном диапазоне световых волн стеклянную пластину с плоскопараллельными полированными гранями.
Слайд-проектор 3 позволяет проецировать изображение пространственной системы эквидистантных оптически контрастных полос с носителя 5. Слайд-проектор 3 обеспечивает возможность регулирования светового потока электрически либо с помощью диафрагмирования.
Регистратор 4 изображения может, например, представлять собой малогабаритную CCD телевизионную камеру с разрешением не менее 300 линий с уровнем собственных шумов не хуже 50 дБ.
Носитель 5 изображения пространственной системы эквидистантных оптически контрастных полос может, например, представлять собой стеклянную пластину, с одной стороны покрытую металлическим напылением в виде системы эквидистантных оптически контрастных полос с пространственной частотой 3-5 линий на 1 мм с одинаковыми промежутками, причем расстояние между полосами соответствует их ширине. Носитель 5 является основным метрическим элементом устройства и поэтому к точности его изготовления предъявляются повышенные требования.
Светофильтры 6 могут, например, представлять собой стандартные фото- или телевизионные фильтры.
Средство 7 преобразования изображения в цифровой вид может, например, представлять собой аналого-цифровой преобразователь.
Блок 8 обработки данных может быть выполнен на основе компьютера IBM PC/AT в стандартной конфигурации.
Калибровочная пластина 9 может, например, представлять собой пластину с плоской рабочей поверхностью (с отклонением не более 0,01 мм) и иметь матовую хорошо отражающую рабочую поверхность, обеспечивающую возможность ее периодической очистки.
Способ определения формы стоп человека под нагрузкой реализуется с помощью вышеописанного устройства следующим образом.
Предварительно, перед началом обследования пациента и определения формы стоп, калибровочную пластину 9 устанавливают непосредственно на рабочую поверхность опорной пластины 1. При помощи слайд- проектора 3 и установленного на его выходе носителя 5 проецируют с помощью зеркала 2 через прозрачную опорную пластину 1 на калибровочную пластину 9 изображение пространственной системы эквидистантных оптически контрастных полос. Посредством блока 4 осуществляют регистрацию отраженного в зеркале 2 изображения указанной системы полос, спроецированных на калибровочную пластину 9, далее зарегистрированное изображение, т.е. калибровочный видеосигнал, оцифровывается с помощью средства 7 преобразования изображения в цифровой вид, а полученные результаты - калибровочные данные - передаются в блок 8 обработки данных, где записывается в запоминающее устройство (не показано) и впоследствии используется для коррекции систематических методических и инструментальных погрешностей. Далее калибровочную пластину 9 снимают с рабочей поверхности опорной пластины 1. Получение калибровочных данных осуществляют однократно перед началом работы, а также после технического обслуживания, связанного с заменой и/или перемонтажом оптической схемы устройства.
После того, как калибровочные данные записаны в запоминающее устройство блока 8 обработки, устройство готово к определению формы стоп человека под нагрузкой. Для проведения обследования пациент 10 садится на высокий стул или табурет (не показан) и аккуратно ставит босые ноги на рабочую поверхность опорной пластины 1, опираясь на всю подошвенную поверхность стоп, затем встает и принимает привычную позу свободного вертикального равновесия (руки свободно опущены, носки и пятки стоп выровнены). Вес тела пациента 10 должен быть распределен равномерно на обе стопы. Через опорную пластину 1 посредством зеркала 2 на подошвенную поверхность стоп пациента 10 проецируют при помощи слайд-проектора 3 с носителя 5 изображение пространственной системы эквидистантных оптически контрастных полос. Пациент 10 сохраняет принятую позу в течение 1-2 сек. В этот промежуток времени осуществляют регистрацию изображения указанной системы полос, проецируемых на подошвенную поверхность стоп, через зеркало 2 посредством блока 4, после чего зарегистрированное изображение, представляющее собой видеосигнал, преобразуют в цифровой вид с помощью средства 7, а полученные результаты передают в блок 8 обработки данных, где сохраняют в виде файла исходного изображения (фиг. 2), а также используют для восстановления трехмерной модели подошвенной поверхности стоп.
При проведении обследований необходимо следить за чистотой рабочей поверхности пластины 1, которая загрязняется жировыми выделениями в момент контакта с кожными покровами подошвенной поверхности стоп, что приводит к появлению паразитных засветок на регистрируемых изображениях. Для устранения указанных загрязнений рабочая поверхность пластины 1 обрабатывается по мере необходимости обезжиривающим средством (например, спиртом) и протирается насухо.
Восстановление трехмерной модели подошвенной поверхности может быть произведено по одной из известных методик фазометрии, используемых для обработки изображений полосатых картин, например на основе методики пространственного детектирования фазы, приведенной ниже.
Видеосигнал, полученный с помощью блока 4, имеет амплитуду, изменяющуюся в зависимости от яркости изображения, модулирован по фазе в соответствии с деформацией контрастных линий и описывается выражением
I(x,y) = B(x,y)+A(x,y)•cos(2π•f•x+Ф(x,y)),
где I(x, y) - регистрируемая блоком 4 интенсивность изображения системы полос в координатах x, y; B(x, y) - фоновая составляющая; A(x, y) - амплитуда яркости пространственной системы полос; f - пространственная частота расположения полос (количество полос на единицу длины); Ф(x, y) - модуляция пространственной фазы полос, вносимая рельефом подошвенной поверхности.
В соответствии с заданной программой блок 8 обработки производит фазовое детектирование видеосигнала, полученного при регистрации изображения указанной системы полос, спроецированных на подошвенную поверхность стоп пациента 10, и вычисление разности фаз этого видеосигнала и калибровочного видеосигнала. Результат вычислений проиллюстрирован изображением, приведенным на фиг. 3, на котором показан фазовый сдвиг пространственной системы эквидистантных оптически контрастных полос по модулю 2π, где фаза полос представлена в виде яркости, плавно изменяющейся в пределах диапазона 2π и претерпевающей скачкообразное изменение при выходе за этот диапазон. Вычитание разности фаз видеосигнала, полученного в результате регистрации изображения системы полос, спроецированных на подошвенную поверхность стопы, и калибровочного видеосигнала позволяет избавиться от искажений, связанных с ограниченной точностью взаимной ориентации элементов оптической схемы устройства, а именно слайд-проектора 3, блока 4 регистрации изображения, зеркала 2 и опорной пластины 1. Высота H(x, y) подошвенной поверхности относительно рабочей поверхности опорной пластины 1 в точке с координатами (x, y) связана с дополнительным фазовым сдвигом полос Ф(x, y), обусловленным рельефом поверхности стоп, и может быть определена из выражения
H(x,y) = L•Ф(x,y)/(2π•D•f-Ф(x,y)),
где L - расстояние от рабочей поверхности опорной пластины 1 до блока 4 регистрации изображения по ходу пути его осевого луча; D - расстояние между входными зрачками объективов слайд-проектора 3 и блока 4 регистрации изображения.
Далее в соответствии с программой обработки блок 8 выделяет из изображения пространственной системы эквидистантных оптически контрастных полос, спроецированных на подошвенную поверхность стоп, внешний контур стоп, в пределах которого формируют цифровую трехмерную модель подошвенной поверхности стоп, которая представлена в виде полутонового изображения на фиг. 4. Полученная трехмерная модель подошвенной поверхности стоп представляет собой матрицу чисел размерностью 256х256 и более, каждый элемент которой задает значение высоты рельефа подошвенной поверхности. Такая цифровая модель подошвенной поверхности с высокой точностью, составляющей не менее 0,3 мм по координате Z, и высоким пространственным разрешением, достигающим 0,2 мм, описывает форму подошвенной поверхности стоп, что позволяет рассчитать любые количественные параметры, требуемые для диагностики деформации стоп. При этом могут быть рассчитаны как общепринятые при анализе плантограмм параметры, получаемые на основе внешнего контура стопы, так и параметры, описывающие размеры, объем и форму подсводного пространства стоп, не находящегося в непосредственном контакте с рабочей поверхностью опорной пластины 1. Получение данных о подсводном пространстве стоп позволяет повысить информативность исследований и достоверность диагностирования патологических состояний стоп.
По полученной цифровой трехмерной модели подошвенной поверхности стоп для визуального или качественного анализа могут быть построены различные ее графические представления, такие как топограмма, отображающая подошвенную поверхность линиями равного уровня, графики произвольных сечений поверхности либо графики в виде аксонометрической проекции поверхности стопы (фиг. 5), которые могут быть при необходимости распечатаны на печатающем устройстве блока 8 обработки (не показано).
Таким образом, предлагаемое изобретение позволяет повысить информативность исследований стоп и повысить точность определения их форм. Кроме того, изобретение обеспечивает короткий период экспозиции и минимальное время обработки (порядка 10 сек). Полное время обследования пациента не превышает 1-2 минут, что обеспечивает возможность использования изобретения для проведения массовых обследований населения с целью выявления деформации стоп, актуальных в большей степени для детского населения. Кроме этого, изобретение может быть использовано для более углубленных исследований состояния и функций стопы, например, исследования ее амортизирующей способности при различных режимах нагружения.
Используемая литература
1. Авторское свидетельство СССР N 1132915, кл. A 61 B 5/10, 1985 г.
2. Евразийский патент N 00011, кл. A 61 B 5/103, 1998 г.
3. Авторское свидетельство СССР N 1219051, кл. A 61 B 5/10, 1986 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ТУЛОВИЩА ЧЕЛОВЕКА ВО ВРЕМЯ ХОДЬБЫ | 2002 |
|
RU2219836C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ СТОПЫ ЧЕЛОВЕКА | 2014 |
|
RU2551953C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2523346C2 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ ФАЗЫ ШИРОКОПОЛОСНЫХ ДИСКРЕТНЫХ ФАЗОМОДУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2194357C2 |
| СПОСОБ СОЗДАНИЯ СВЕТОВОГО СОПРОВОЖДЕНИЯ МУЗЫКИ И ВЫХОДНОЕ ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2040939C1 |
| УСТРОЙСТВО ДЛЯ АНТРОПОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ | 2009 |
|
RU2436508C2 |
| ЦИФРОВОЙ СПОСОБ СОЗДАНИЯ НЕИСКАЖЕННЫХ ПРОЕКЦИЙ НА ПОВЕРХНОСТИ РЕАЛЬНЫХ ОБЪЕКТОВ | 2023 |
|
RU2821838C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ И РАСПОЗНАВАНИЯ ПОВЕРХНОСТЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199718C1 |
| СПОСОБ ОПТИЧЕСКОЙ ТОМОГРАФИИ ТРЕХМЕРНЫХ МИКРООБЪЕКТОВ И МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2145109C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |
Изобретение используется в медицине, в частности в ортопедии и антропологии, для определения деформации стоп, а также в обувной промышленности для определения формы колодки. Форму стоп человека определяют путем установки стоп на рабочую поверхность оптически прозрачной и горизонтально расположенной плоскопараллельной опорной пластины предлагаемого устройства и регистрации отраженного в, по меньшей мере, одном размещенном под опорной пластиной и под углом 45o к ней зеркале изображения подошвенной поверхности стоп. Предварительно на рабочей поверхности опорной пластины размещают калибровочную пластину с плоской матовой отражающей поверхностью, проецируют на нее под заданным углом пространственную систему оптически контрастных полос, регистрируют отраженное в зеркале изображение и получают по нему калибровочные значения в цифровом виде. После чего на подошвенную поверхность стоп, установленных на рабочую поверхность опорной пластины, также проецируют пространственную систему оптически контрастных полос, а по зарегистрированным изображениям посредством блоков регистрации изображения и обработки данных с учетом калибровочных значений восстанавливают в цифровом виде трехмерную модель подошвенной поверхности стоп и по ее параметрам судят о поверхности стоп. Изобретение позволяет повысить точность и оперативность определения формы стоп человека под нагрузкой за счет обеспечения возможности автоматизированного получения трехмерной модели подошвенной поверхности стоп. 2 с. и 5 з.п. ф-лы, 5 ил.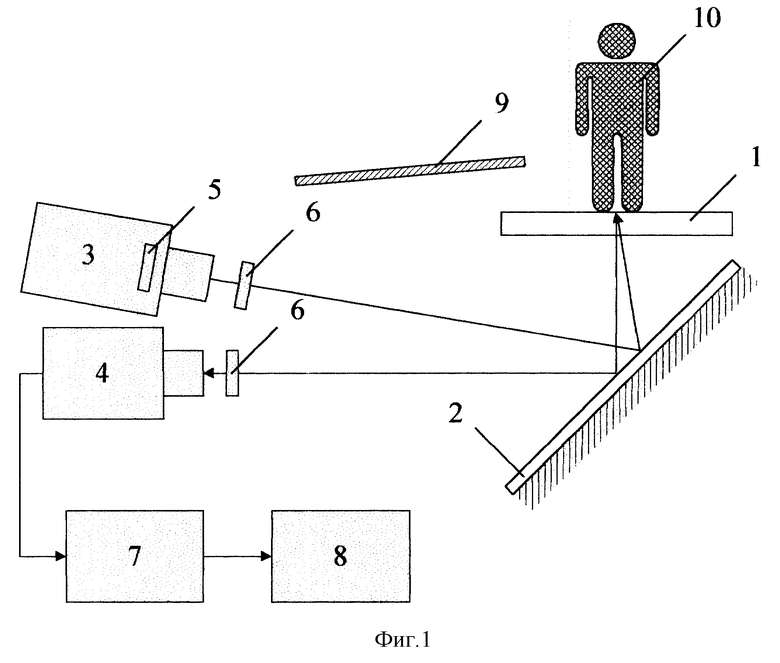
| Устройство для фотометрического исследования стоп | 1984 |
|
SU1219051A1 |
| Огнетушитель | 0 |
|
SU91A1 |
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Экономайзер | 0 |
|
SU94A1 |
| ЕР 0362591 А1, 11.04.1990. | |||

