Изобретение относится к устройствам вычислительной техники и может быть использовано для ввода информации в компьютер.
На настоящий момент известны различные конструкции манипуляторов типа "Мышь", отличающиеся друг от друга типом используемых датчиков (механические, оптико-механические, оптические), количество клавиш ввода (1, 2, 3, 4, 41), различной разрешающей способностью и т.д. Конструкции этих манипуляторов описаны, например, в [1] У.Ньюмен, Р.Спрулл. Основы интерактивной машинной графики. - М.: Мир, 1976, с 184 - 185, рис. 9.4 (W. Newman, R.Sproull. Principles of Interactive Computer Graphics. McCraw-Hill Book Company, 1973.).[2] Воробьев Н.В., Безобразов В.С. Графический манипулятор типа "Мышь" для персональных ЭВМ. Микропроцессорные средства и системы, 1988, N 3, с. 57 - 59, рис. 1. [3] Файнберг В. Новые "мыши" - безделушка или реальность? "Компьютер-Пресс", 1990, N 8, с. 18 - 20. [4] C. Smith. Input Devices. PC WORLD, 1992, Vol. 10, N 5, p. 140 - 147.
Общим недостатком рассматриваемых устройств является отсутствие возможности учета угла поворота манипулятора "мышь".
Известна конструкция манипулятора "мышь", описанная в авторском свидетельстве N 4735767/24. Устройство содержит два датчика координат, каждый из которых содержит два информационных фотодатчика, два датчика направления вращения валиков, два модулирующих диска и два флажка, укрепленных на взаимно перпендикулярных валиках, подвешенных к корпусу с помощью опорных подшипников и кинематически связанных с шаром и прижимным роликом. При вращении шара вращаются валики, датчики выдают импульсы света на информационные выходы устройства; флажки перемещаются в пределах ограничителей с проскальзыванием на осях и в зависимости от направления вращения перекрывают или открывают фотодатчики направлений.
В ряде приложений (например, в ряде игровых программ, в графических редакторах и пр.) представляются полезным регистрировать для управления не только поступательное движение манипулятора, но и поворот его в горизонтальной плоскости. Эта задача решена в данном изобретении путем ввода дополнительного датчика линейного перемещения, расположенного на некотором расстоянии в плоскости стола от датчика двухкоординатного перемещения традиционного манипулятора так, чтобы обеспечивалась регистрация перемещения дополнительного датчика относительно стола в направлении, перпендикулярном оси, проходящей через основной и дополнительный датчик.
Одно из возможных инженерных решений представлено на чертеже.
Устройство состоит из двух шаров 1, 2, четырех валиков 3, 4, 5, 6, трех модулирующих дисков 7, 8, 9, трех информационных фотодатчиков 10, 11, 12 регистрации вращения валиков, двух прижимных роликов 13, 14, двух пружин 15, 16 и корпуса 17.
Элементы 1,3,4,7,8,10,11,13,15 образуют основной (двухкоординантный) датчик перемещения, в котором шар 1 фрикционно связан со столом и с валиками 3, 4, с которыми жестко соединены модулирующие диски 7, 8, вращение которых с учетом направления регистрируется датчиками 10 и 11 регистрации вращения валиков, прижимной ролик 13 и пружина 15 обеспечивают кинематическую связь шара 1 с валиками 3 и 4.
Элементы 2, 5, 6, 9, 12, 14, 16 образуют дополнительный (однокоординатный) датчик линейного перемещения, в котором шар 2 фрикционно связан со столом и с валиком 5, с которым жестко соединен модулирующий диск 9, вращение которого с учетом направления регистрируется датчиком 12 регистрации вращения валика, прижимной ролик 14, пружина 16 и валик 6 обеспечивают связь шара 2 с валиками 5 и 6.
Оси всех валиков расположены в плоскости, параллельной поверхности стола и проходящей через центры шаров. Оси валиков 5, 6 параллельны прямой, проходящей через центры шаров; оси валиков 3 и 4, 5 и 6 взаимно перпендикулярны.
При движении манипулятора по столу шары 1 и 2 вращаются, приводя в движение валики 3, 4, 5, 6. Датчики 10, 11, 12 выдают на информационные устройства импульсы, характеризующие углы и направления поворота модулирующих дисков 7, 8, 9.
При этом поступательное движение манипулятора в его системе координат определяется по измерительным датчикам 10, 11 углам и направлениям поворота валиков 3, 4.
При поступательном движении манипулятора по столу углы поворота валиков 4, 5 и выдаваемые датчиками 11, 12 показания совпадают вследствие параллельности осей этих валиков; при вращательном движении разность углов поворота валиков пропорциональна углу поворота манипулятора вследствие того, что их оси параллельны прямой, проходящей через центры шаров.
Таким образом, в качестве величин, характеризующих поступательное движение манипулятора в связанной с ним системе координат, могут использоваться показания датчиков 10, 11, а в качестве величины, отражающей вращательные движения манипулятора, можно использовать разность показаний датчиков 11, 12. Вычисление разности показаний датчиков может производиться, например, в программе персонального компьютера, с которым используется манипулятор, поскольку команда вычитания входит в состав базовых команд всех распространенных процессоров.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР "САМОХОДНАЯ ЧЕРЕПАХА ПРОХОРОВА WONDERTURTLE" (ВАРИАНТЫ) | 1999 |
|
RU2197746C2 |
| ТРЕХКООРДИНАТНЫЙ МАНИПУЛЯТОР ГРАФИЧЕСКОЙ ИНФОРМАЦИИ "ЧЕРЕПАХА" НА БАЗЕ ОДНОКООРДИНАТНЫХ ДАТЧИКОВ | 1999 |
|
RU2168208C2 |
| МАНИПУЛЯТОР "ЧЕРЕПАХА ПРОХОРОВА" | 1999 |
|
RU2180134C2 |
| МАНИПУЛЯТОР "ЧЕРЕПАХА ПРОХОРОВА" (ВАРИАНТЫ), "КОЛЕСО ПРОХОРОВА", ФРИКЦИОННЫЙ КОМПАС | 1999 |
|
RU2234128C2 |
| "Манипулятор графической информации типа "Мышь" | 1989 |
|
SU1737473A1 |
| ФРЕЗЕРНЫЙ СТАНОК С ЧПУ | 2013 |
|
RU2572111C2 |
| МАНИПУЛЯТОР ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ УСТРОЙСТВАМИ/КОМПЬЮТЕРОМ | 2013 |
|
RU2542369C1 |
| Устройство для подачи ящиков с откидными крышками и их закрывания | 1985 |
|
SU1333612A1 |
| Двухкоординатный стол | 1979 |
|
SU781008A1 |
| Модуль промышленного робота | 1979 |
|
SU831606A1 |
Изобретение относится к устройствам вычислительной техники и предназначено для ввода информации в компьютер. Технический результат изобретения заключается в возможности обеспечить ввод дополнительно угловой координаты поворота манипулятора в плоскости стола. Манипулятор содержит двух и однокоординатный датчики перемещения, при этом последний регистрирует линейное перемещение относительно стола в направлении, перпендикулярном проходящей через датчики прямой. При движении манипулятора по столу датчики выдают информацию о величинах и направлениях перемещений, выходы датчиков являются выходом устройства. Поступательная компонента движения манипулятора в его системе координат определяется измерениями от двухкоординатного датчика, а вращательная - разностью измерений однокоординатного датчика и одной из координат двухкоординатного датчика. Вычисление необходимой разности осуществляется дополнительной командой в программе компьютера, использующего данный манипулятор. 1 з.п. ф-лы, 1 ил.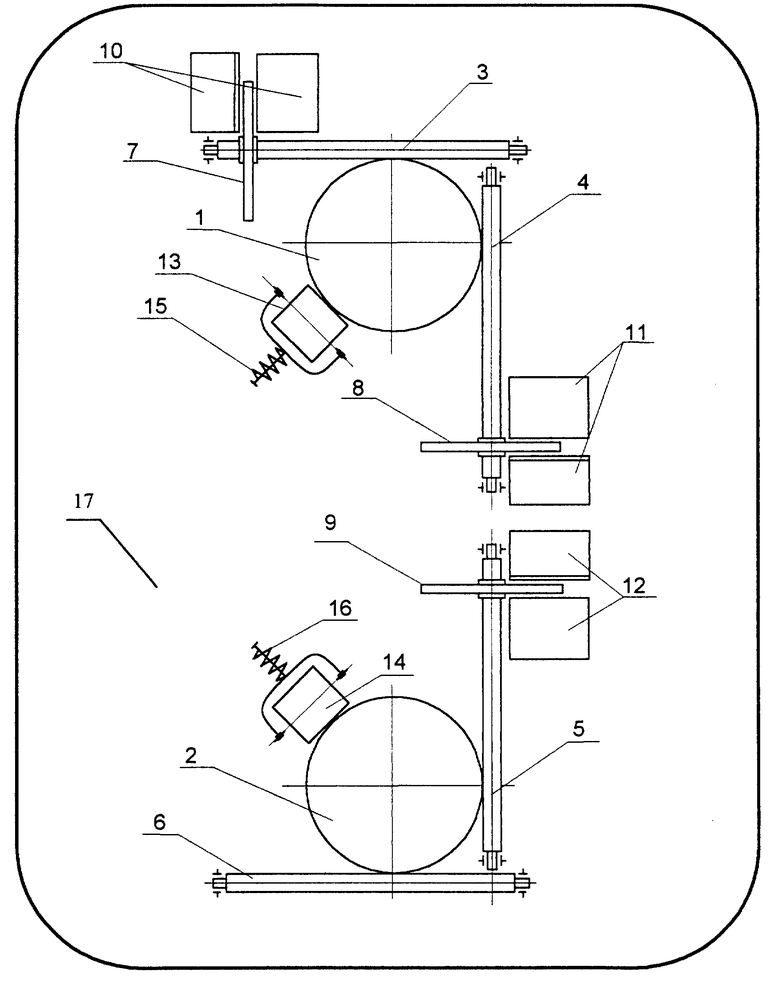
| "Манипулятор графической информации типа "Мышь" | 1989 |
|
SU1737473A1 |
| US 4939508 A, 03.07.90 | |||
| Воробьев Н.В | |||
| и др | |||
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| Ньюмен У | |||
| и др | |||
| Основы интерактивной машинной графики.-М.: Мир, 1976, с.184 и 185, рис.9.4 | |||
| Файнберг В | |||
| Новые "мыши" - безделушки или реальность? В: Компьютер-Пресс,-1990, N8, с.18-20 | |||
| Smith C | |||
| Input Devices.B:PC WORLD, 1992, vol.10, N5, pp.140-147. | |||

