Предметом изобретения является активный протез руки, снабженный с активным большим пальцем, расположенным под углом к плоскостн ладони, и механизмами, осуществлягон;ими ротацию предплечья и кисти, сгибание и фиксацию сгиба локтя в нескольких положениях.
Предлагаемый протез руки обеспечивает короткий активный схват иin длительный пассивный схват и дает возможность облегчить управление многими функциями протеза.
Особенность протеза заключается в том, что лучезапястный шарнир его снабжен двумя продольно распо.чоженными и и:арнирно закрепленными на поворотной каретке патрубками - приемниками для кисти, между которыми имеется спиральиая пружина, шарнирио соединенная с верхними концами патрубков нак.тоино расположенными рычагам.
Протез снабжен съемным рабочим приспособлением из совместно используемых кольца со скобой и крюка, сиабгкениого неподвижно или поворотно устанавливаемой
ВТУЛКОЙ.
Для уирав.чеиия протезом к систему тяг введен многорычажный механизм, онределяющий порядок движения ii величину ходов механизмов кисти и локтя, а локтевой замок снабжен двухрожковой вилкой, один рожок который осуществляет фиксацию сгиба, а второй фиксирует ротацию предплечья.
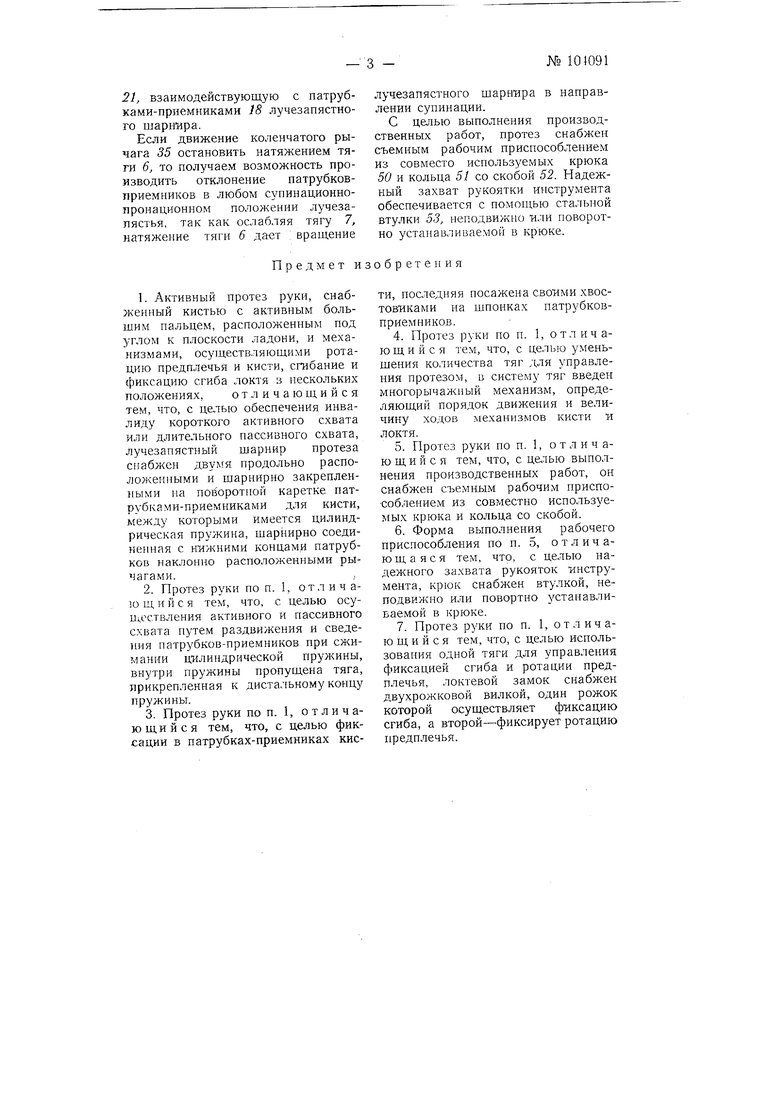
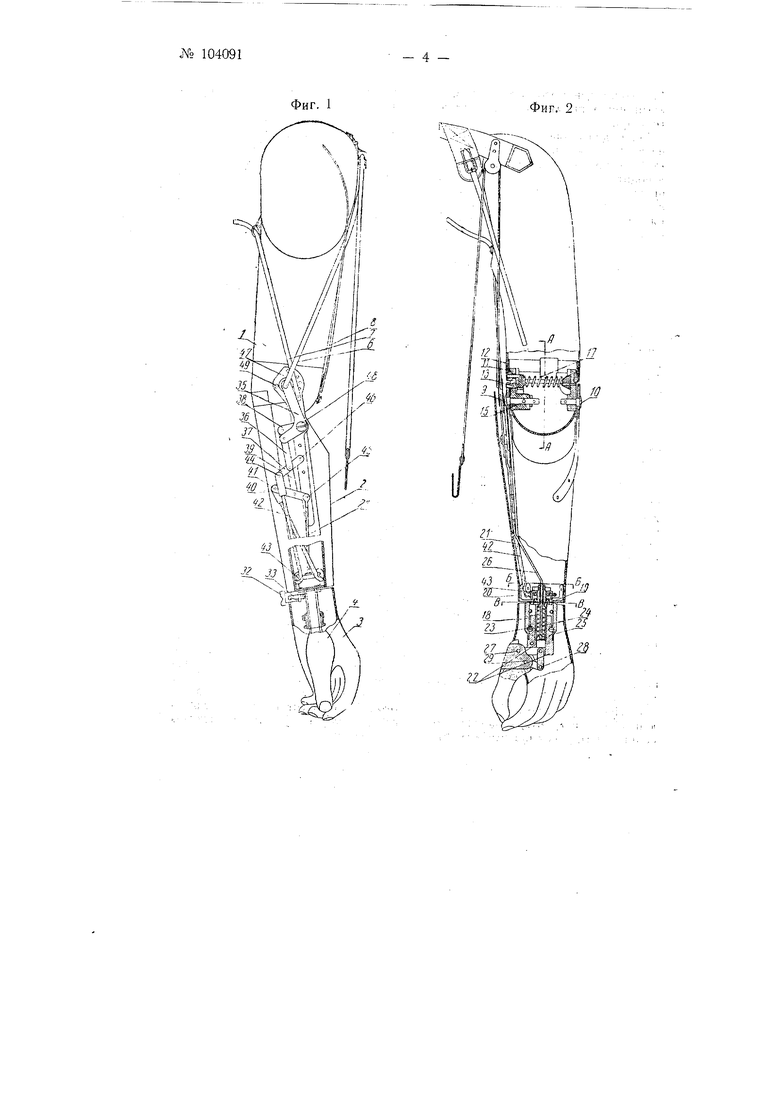
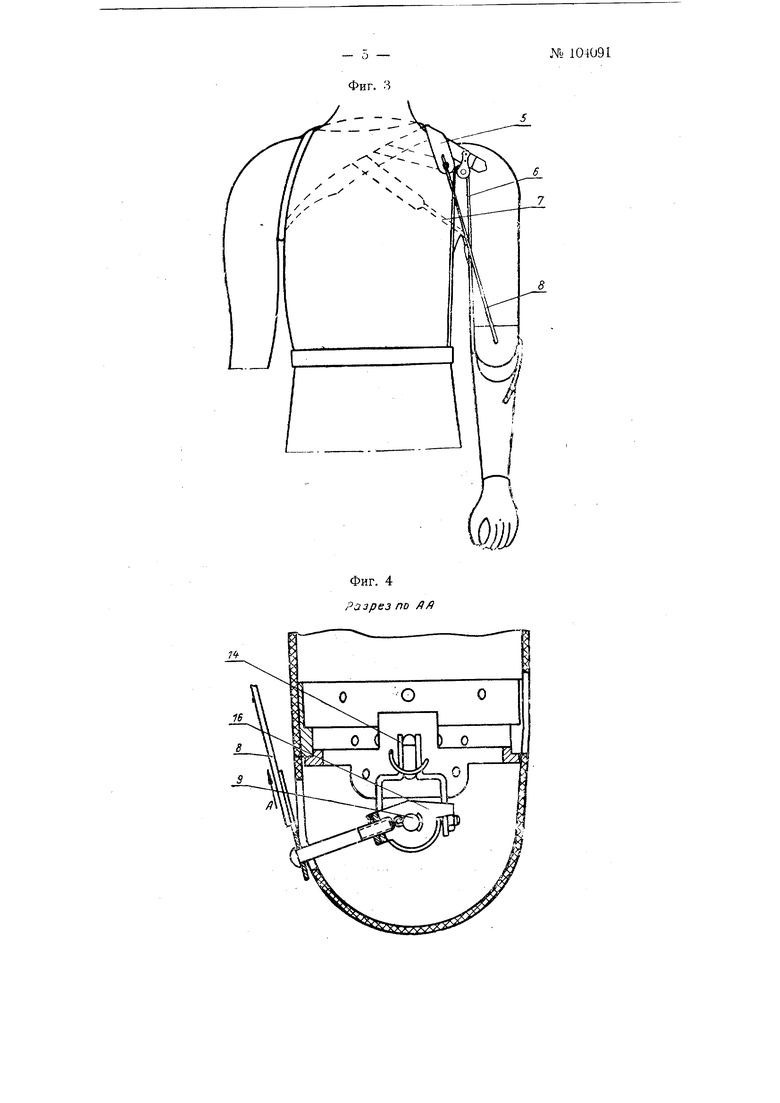
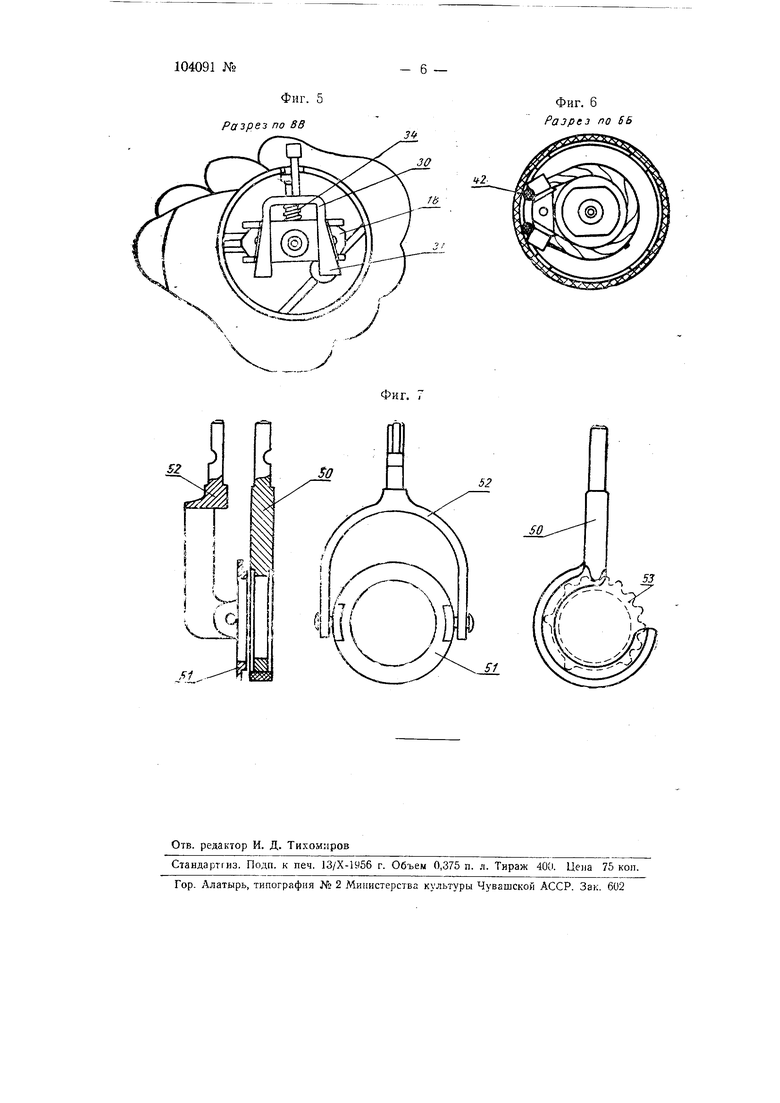
На фиг. 1 изображен схематический вид протеза сбоку; на фиг. 2- его вид спереди; на фиг. 3-схема крепления протеза; на фиг. 4-разрез по АА на фиг. 2; на фиг. 5- разрез по ББ на фиг. 2; на фиг. б-разрез по ВВ на фиг. 2; на фиг. 7-вид съемного рабочего приспособления.
Протез выпо.лнен в виде шарнирно соединенных между собой гильзы плеча / и гильзы предплечья 2, снабженных кистью 5 с активным большим пальцем 4, расположенным под углом к плоскости ладони, лямочным креплением 5 и тремя тягами 6, 7, 8 для управления протезом.
Гильза плеча / в нижней трети имеет устройство для ротации предплечья и локтевой замок для сгибания локтя и фиксирования его в нескольких положениях.
Сгиб предплечья в локте происходит вращением предплечья на полуосях 9 и 10 посредством тяги 7. Ротационное приведение и отведение предплечья достигается вращением предплечья вместе со стаканом // в стальном кольце 12. Локтевой замок снабжен двухрожковой вилкой /5 один рожок которой осуществляет фиксацию сгиба, а второй - фиксирует ротацию предплечья. Движение вилки достигается враи1,ательпым движением каретки 14 на оси 15, Бызватшым вращением рычага 16 на полуоси 9 силой, приложенной к тяге 8 в направлении стрелки Л; обратное вилки 13 осуществляется пружииой 17.
Гильза нреди.:1.ечья 2 снабжена лучезапястпым шарниром, обеспечивающим ротацию кисти 3, активное или пассивное разжатие и сжатие пальцев кисти и замену кисти рабочими приспособлениями.
Лучезапястный шарнир содержит два продольно-расположенных патрубка-приемника 18, своими нижними концами шарнирно закренлеиных в каретке 19, хвостовик которой поворотно монтирован во ф.чанце 20 предплечья и связан с тягой 21, вращающей каретку 19, что обеспечивает ротацию кисти 3, посаженной своими хвостовиками 22 на шпонках 23 патрубков-приемников 18.:
Между патрубками-приемниками имеется цилипдрическая пружина 24, шарнирно соединенная с нижними концами патрубков-приемников 18 наклонно расположенными рычагами 25. При сжимании пружнны 24 проходящей внутри ее тягой 26 рычаги 25 отклоняют в стороны верхние концы патрубковприемников, а при разжимании пружины 24 патрубки-приемники 18 возвращаются в исходное положение.
При отклонении патрубков-приемников хвостовики 22 кисти 3 расходятся в противоположные стороны и движут навстречу друг другу оси 27 и 28, заставляя этим ось 29 двигаться по окружности около оси 27 и производить разжатие кисти па 90 мм. При возвращении патрубковприемников 18 в исходное положение осуществляется схват кистью.
Патрубки-приемники могут фиксированы в отклоненном положении (активный или пассивный схват) ручным фиксатором 30, выиолненным в виде скобы с клинообразными концами 31. Чтобы зафиксировать схват, достаточно вывести, зуб зацепления стержня 32 из гнезда в стойке 33. При этом пружина 34 передвинет фиксатор 30, расклинив патрубки-приемники с кареткой 19.
Для управления протезом в систему тяг 6, 7 н 8 введен многорычажиый механизм, определяющий порядок движения и величину ходов механизмов кисти и локтя.
Тяга 6 соединена с рычажным механизмом, состоящим из коленчатого рычага 35, тяги 36 и коромысла 37. Тяга 7 соединена с коленчатым рычагом 38, который с полющью тяги 39 соединен с коромыслом 40. На оси 41 коромысла 40 шаргшрио укреплен один конец тягн 42, огибающей шкив 43 лучезапястного шарнира; второй конец тяги 42 Н1арнирио укреплен на оси 44 коромысла 38.
Натягивая основную тягу 7 вращают коленчатый рычаг 38 через соединительную тягу 39, вызывая движение коромысла 40 в направлении локтевого замка. Коромысло 40 встречает сопротивлепие своему движению от прзжины 24 в лучезапястном шарнире и начинает вращаться относительно оси 45, натягивая тягу 42 и поворачивая ее через шкив 43 каретки 19 лучезапястного шарнира в сторону пронации.
При этом движении второй конец тяги 42 движется в направлении лучезапястного щарнира, заставляя коромысло 37 вращаться на оси 46, зацепленной на шине 47, и через тягу 36 вран1,ает коленчатый рычаг 35 на оси 48 до сонрикосповения длинного конца этого рычага с винтом 49.
Упираясь в винт 49, коленчатый рычаг 35 получает бо.чьшее сопротивление движению, чем сопротивление пружины 24, поэтому коромысло 40 начинает враншться уже относительно оси 41, натягивая тягу
21, взаимодействующую с патрубками-приемниками 18 лучезапястного шарнира.
Если движение коленчатого рычага 35 остановить натяжением тяги 6j то получаем возможность производить отклонение патрубковприемников в любом сунинационнопронационном положении лучезапястья, так как ослабляя тягу 7, натяжение тяги 6 дает вращение
Предмет изобретения
1.Активный протез руки, снабженный кистью с активным большим пальцем, расположенным под утлом к плоскости ладони, и механизмами, осуществляюндими ротацию предплечья и кисти, сгибание и фиксацию сгиба локтя з нескольких положениях, отличающийся тем, что, с целью обеспечения инвалиду короткого активного схвата или длительного нассивного схвата, лучезапястный шарнир протеза сь-абжен двумя нродольно расположенными и шарнирно закрепленными на поворотной каретке патрубками-приемниками для кисти, ме.жду которыми имеется цилиндрическая пружина, шарнирно соединенная с нижними концами патрубков наклонно расположенными рычагами.
2.Протез руки по п. 1, отлич а1о ш, и и с я тем, что, с целью осуПлСствления активного и пассивного схвата нутем раздвижения и сведения патрубков-приемников при сжимании цилиндрической пружины, внутри пружины пропущена тяга, прикрепленная к дистальному концу пружины.
3.Протез руки по п. 1, отличающийся тем, что, с целью фиксации в патрубках-приемниках кислучезапястного шарнира в направлении супинации.
С целью выполнения производственных работ, протез снабжен съемным рабочим приспособлением из совместо используемых крюка 50 и кольца 51 со скобой 52. Надежный захват рукоятки инструмента обеспечивается с помон1,ью стальной втулки 53, неподвижно или поворотно устанавливаемой в крюке.
ти, последняя посажена своими хвостовиками на шпонках патрубковприемников.
4.Протез руки по п. 1, отличающий с я тем, что, с целью уменьшения количества тяг для управления протезом, в систему тяг введен многорычажный механизм, определяющий порядок движения и величину ходов механизмов кисти и локтя.
5.Протез руки по п. 1, о т л и ч аю щ и и с я тем, что, с целью выполнения производственных работ, он снабжен съемным рабочим приспособлением из совместно используемых крюка и кольца со скобой.
6.Форма выполнения рабочего приспособления по п. 5, отличающаяся тем, что, с целью надежного захвата рукояток инструмента, крюк снабжен втулкой, неподвижно или повортно устанавливаемой в крюке.
7.Протез руки по п. 1, отличающийся тем, что, с целью использования одной тяги для управления фиксацией сгиба и ротации предплечья, локтевой замок снабжен двухрожковой вилкой, один рожок которой осуществляет фиксацию сгиба, а второй--фиксирует ротацию предплечья.
№
f/
42
Г: -х-тЙ, jl а
Л
Tt
Фиг. 4 Разрез по flfi
104091 №
Фиг. 5 Разрез по 8В
Фиг. 6 Разрез по SB
2

| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| Многофункциональный активный протез руки | 1981 |
|
SU1009456A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| ПАЛЕЦ ТЯГОВОГО ПРОТЕЗА И УСТРОЙСТВО ПРОТЕЗА КИСТИ И ПРОТЕЗА ПРЕДПЛЕЧЬЯ С ТАКИМИ ПАЛЬЦАМИ | 2020 |
|
RU2759777C1 |
| Протез руки | 1989 |
|
SU1727824A1 |
| Протез плеча | 1981 |
|
SU969262A1 |
| ПРОТЕЗ КИСТИ | 1998 |
|
RU2141289C1 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| Пневматический протез руки | 1974 |
|
SU520105A1 |
52
.л 53
7
