Изобретение относится к медицинской технике, а именно к протезированию и протезостроению. Предложенное устройство многофункционального активного протеза плеча может быть использовано при культях плеча не менее 12 см от подмышечной впадины, после односторонней и двусторонней ампутации в пределах звена плеча.
Известен протез плеча с биоэлектрическим управлением двумя функциями движения («Конструкции протезно-ортопедических изделий». Под ред. к.т.н. А.П. Кужекина. Москва «Легкая и пищевая промышленность». 1984. - 240 с., стр. 189-190.), содержащий искусственную кисть с электромеханическим приводом, механизм ротации предплечья с электромеханическим приводом, гильзы плеча и предплечья, локтевой шарнир с тяговым управлением, механизм пассивной ротации плеча и механизм пассивного движения в лучезапястном сочленении, систему биоэлектрического управления и блок питания.
Недостатком данного устройства являются низкие функциональные возможности поскольку механизмы ротации плеча и лучезапястного шарнира реализованы в пассивном исполнении. Кроме того управление кистью, ротацией предплечья и тяговым локтем выполняется по очереди. Кроме того применение тягового привода снижает возможность использовать подвижности культи плеча и надплечья для управления активными шарнирами.
Эти недостатки частично устранены в известном протезе плеча с биоэлектрическим управлением тремя функциями движения («Конструкции протезно-ортопедических изделий». Под ред. к.т.н. А.П. Кужекина. Москва «Легкая и пищевая промышленность». 1984. - 240 с., стр. 190-191.),
Это устройство является наиболее близким по функциональной и технической сущности и выбрано авторами в качестве прототипа.
Известное устройство содержит искусственную кисть с электромеханическим приводом и пассивным лучезапястным шарниром, механизм ротации предплечья с электромеханическим приводом, гильзы плеча и предплечья, механизм локтевого шарнира с электромеханическим приводом, механизм пассивной ротации плеча, систему биоэлектрического управления и блок питания.
Недостатком известного устройства являются низкие функциональные возможности в связи с тем, что оно оснащено механизмами пассивной ротации плеча и сгибания кисти, при этом активные степени подвижности не имеют постоянной готовности к работе, так как управление активной подвижностью сгибания локтя, ротацией предплечья и подвижностью пальцев кисти выполняется по очереди в установочном режиме только со зрительным контролем положения активных звеньев. Наличие пассивных шарниров ориентации искусственной кисти и поочередное управление активными шарнирами усложняет работу оператора-инвалида и значительно увеличивает время выполнения рабочих операций.
Задачей предлагаемого изобретения является расширение функциональных возможностей устройства, повышение удобства инвалида и сокращение времени выполнения рабочих операций при целенаправленных действиях по самообслуживанию и при трудовых действиях.
Технический результат поставленной задачи достигается тем, что в протез плеча, содержащий искусственную кисть с электромеханическим приводом и механизмом лучезапястного шарнира, механизм ротации предплечья с электромеханическим приводом, гильзы плеча и предплечья, привод локтевого шарнира с электромеханическим приводом, механизм ротации плеча, систему биоэлектрического управления искусственной кистью и блок питания предлагается: ввести электромеханический привод сгибания кисти и электромеханический привод механизма ротации плеча, наплечник, фиксируемый на корпусе инвалида, соединенный с гильзой плеча и обеспечивающий свободное перемещение надплечья в сгиттальной плоскости, системы позиционного управления ротацией плеча, сгибанием предплечья и сгибанием кисти, содержащие каждая поворотные задающий датчик позиционного управления и датчик обратной связи, соединенный с соответствующим исполнительным механизмом, при этом указанные датчики каждой позиционной системы управления соединены с блоками управления, в которых они соединены соответственно с сумматором, который соединен с двумя импульсными преобразователями, соединенными с широтно-импульсным усилителем мощности, который соединен с мотор - редуктором исполнительного механизма, соответственно ротации плеча, сгибания локтя и сгибания кисти. Кроме того система управления ротацией предплечья выполнена независимой на основе разомкнутого принципа управления с использованием двухканального поворотного задающего датчика с чувствительными элементами в виде комплекта двух контактных выключателей, а система биоэлектрического управления кистью также выполнена двухканальной, где задающие датчики, регистрирующие на культе плеча поверхностный потенциал бицепса и трицепса, содержат каждый токосъемник, соединенный с предварительным усилителем напряжения, который соединен с детектором, соединенным с фильтром. Каждый канал датчиков разомкнутого управления, ротации предплечья и биоэлектрического управления соединены с блоками управления кистью и ротацией кисти, где они соединены последовательно с сумматором, соединенным с двумя импульсными преобразователями, соединенными с широтно-импульсным усилителем мощности, который соединен с мотор - редуктором исполнительного механизма, соответственно кисти и ротации кисти. При этом на гильзе плеча предлагается закрепить задающие датчики управления ротацией плеча, сгибанием предплечья, ротацией предплечья и сгибанием кисти, причем в исходном положении культи плеча опущенной вниз задающий датчик ротации плеча закрепить горизонтально в сагиттальной плоскости, задающий датчик сгибания предплечья закрепить горизонтально во фронтальной плоскости, задающий датчик ротации предплечья закрепить вертикально во фронтальной плоскости в области плечевого сустава, кроме того задающий датчик сгибания кисти закрепить вертикально вдоль гильзы плеча, при этом роторы поворотных датчиков ротации плеча, сгибания предплечья, ротации предплечья и сгибания кисти каждый неподвижно соединить с первым концом упругих стержней, помещенных в гибкие оболочки, зафиксированные одним концом на гильзе плеча. Вторым концом гибкие оболочки упругих стержней датчиков ротации плеча, сгибания предплечья и ротации предплечья закрепить на наплечнике, а второй конец гибкой оболочки датчика сгибания кисти закрепить на предплечье, оставив свободными вторые концы упругих стержней, причем датчики системы биоэлектрического управления кистью также закрепить на гильзе плеча в зонах максимального сигнала мышц антагонистов - бицепса и трицепса.
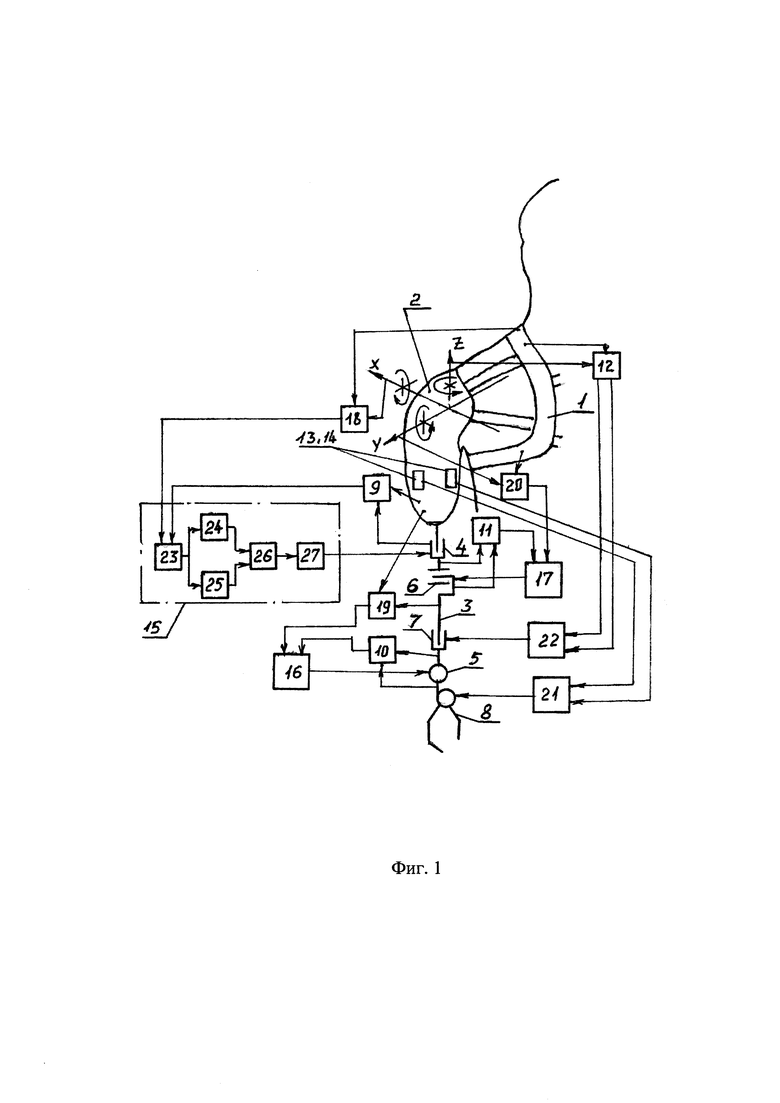
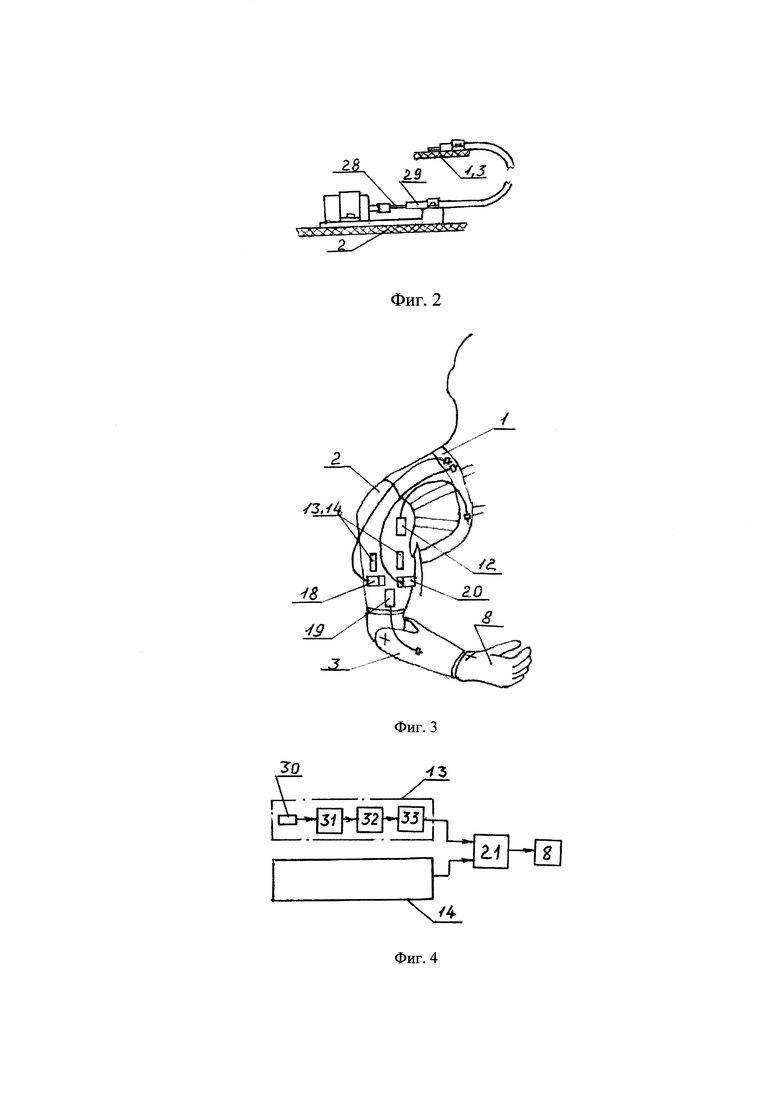
Сущность изобретения поясняется чертежами, где на фиг 1, представлена структурная схема многофункционального активного протеза плеча, на фиг. 2 представлена конструктивная схема подсоединения роторов поворотных датчиков управления, на фиг. 3 представлена схема размещения датчиков управления на гильзе плеча, на фиг. 4 представлена структурная схема датчика биоэлектрического управления.
Многофункциональный активный протез плеча (фиг. 1) содержит наплечник 1, гильзу плеча 2, предплечье 3, исполнительные механизмы ротации плеча 4, сгибания кисти 5, сгибания предплечья 6, ротации предплечья 7 и искусственную кисть 8, три датчика углов (обратной связи) 9, 10, 11 систем управления ротацией плеча, сгибания кисти и сгибания предплечья с позиционной обратной связью, задающие датчики независимого управления 12 (поворотный двухканальный датчик ротации предплечья) и 13, 14 (биоэлектрического управления), а также три электронных блока управления систем управления с позиционной обратной связью 15, 16, 17 - ротацией плеча, сгибанием кисти и сгибанием предплечья, процесс управления в которых инициируется поворотными задающими датчиками 18, 19, 20 и два электронных блока управления 21, 22 независимого управления исполнительными механизмами кисти и ротации предплечья,
Каждый блок управления степенью подвижности в предлагаемом устройстве содержит сумматор 23, два импульсных преобразователя 24, 25, усилитель мощности 26 и мотор-редуктор 27, а каждый поворотный датчик (фиг. 2, 3) неподвижно соединен с первым концом упругих стержней 28, помещенных в гибкие оболочки 29, зафиксированные одним концом на гильзе плеча 2, при этом вторые концы гибких оболочек задающих датчиков ротации плеча 18, сгибания предплечья 20 и ротации предплечья 12 закреплены на наплечнике, а гибкая оболочка датчика 19 сгибания кисти вторым концом закреплена на предплечье 3, при этом вторые концы упругих стержней оставлены свободными, кроме того каждый датчик биоэлектрического управления 13 и 14 (фиг. 4) содержит токосъемник 30, соединенный последовательно с предварительным усилителем напряжения 31, который соединен с детектором 32, соединенным с фильтром 33.
Устройство работает следующим образом.
Управление исполнительными механизмами ротации предплечья 7 и кисти 8, входящими в состав многофункционального активного протеза плеча, осуществляется посредством блоков независимого управления 21, 22 по сигналам от датчика 12 движения надплечья вперед-назад и 13, 14 биоэлектрического управления. Управление движением ротации плеча и сгибанием кисти выполняется путем воздействия отведения - приведения культи плеча с гильзой плеча 2 на задающий датчик ротации плеча 18. Ротация плеча, приводит в действие задающий датчик 19, который инициирует сгибание кисти. Таким образом, при отведении плеча происходит сочетанное движение ротации плеча и сгибания кисти - сочетанное движение подобное естественному стереотипу во время ориентации руки перед моментом захвата кистью объекта манипулирования. При сгибании культи плеча приводится в действие задающий датчик 20 сгибания предплечья, который инициирует сгибание предплечья также подобно естественным манипуляциям при ориентации руки в рабочей зоне моторного поля. После установки искусственной руки около объекта манипулирования, движение надплечья вперед-назад включает поворотный контактный датчик 12 ротации предплечья и выполняется ориентация кисти относительно объекта. Далее методом биоэлектрического управления, воздействуя на датчики 13 и 14 сокращением мышц бицепса или трицепса, производят раскрытие пальцев кисти и захват объекта манипулирования. Манипулирование объектом осуществляется движениями культи плеча и корпуса инвалида подобно естественному стереотипу компенсаторных движений.
Технико-экономическая эффективность изобретения заключается в расширении функциональных возможностей устройства и повышении удобства инвалида. Повышение функциональности достигается за счет сокращения времени выполнения рабочих операций путем использования сочетанного управления звеньями, введением звеньев с позиционной обратной связью и повышением точности координирования движений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Многофункциональный активный ортез руки | 2022 |
|
RU2791396C1 |
| УСТРОЙСТВО ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ СИСТЕМ УПРАВЛЕНИЯ АКТИВНЫХ МНОГОФУНКЦИОНАЛЬНЫХ ПРОТЕЗОВ ПЛЕЧА РАЗРАБОТЧИКОМ СО ЗДОРОВЫМИ РУКАМИ | 2020 |
|
RU2744657C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
| СТЕНД ДЛЯ НАСТРОЙКИ И ИСПЫТАНИЙ МНОГОФУНКЦИОНАЛЬНОГО АКТИВНОГО ПРОТЕЗА ПЛЕЧА | 2019 |
|
RU2729449C1 |
| Многофункциональный активный протез руки | 1980 |
|
SU973121A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1991 |
|
RU2026654C1 |
| Устройство позиционного очувствления подвижности пальцев искусственной кисти | 2018 |
|
RU2702304C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
Изобретение относится к медицине. Многофункциональный активный протез плеча содержит искусственную кисть с электромеханическим приводом и механизмом лучезапястного шарнира, механизм ротации предплечья с электромеханическим приводом, гильзы плеча и предплечья, привод локтевого шарнира с электромеханическим приводом, механизм ротации плеча, систему биоэлектрического управления искусственной кистью и блок питания. В протез введены электромеханический привод сгибания кисти и электромеханический привод механизма ротации плеча, наплечник, фиксируемый на корпусе инвалида, соединенный с гильзой плеча и обеспечивающий свободное перемещение надплечья в сагиттальной плоскости, системы позиционного управления ротацией плеча, сгибанием локтя и сгибанием кисти, содержащие каждая поворотные задающий датчик позиционного управления и датчик обратной связи, соединенный с соответствующим исполнительным механизмом. Указанные датчики каждой позиционной системы управления соединены с блоками управления, в которых они соединены соответственно с сумматором. Сумматор соединен с двумя импульсными преобразователями, соединенными с широтно-импульсным усилителем мощности. Усилитель мощности соединен с мотор-редуктором исполнительного механизма, соответственно ротации плеча, сгибания локтя и сгибания кисти. Система управления ротацией предплечья выполнена независимой на основе разомкнутого принципа управления с использованием двухканального поворотного задающего датчика с чувствительными элементами в виде комплекта двух контактных выключателей. Система биоэлектрического управления кистью выполнена двухканальной, где задающие датчики, регистрирующие на культе плеча поверхностный потенциал бицепса и трицепса, содержат каждый токосъемник, соединенный с предварительным усилителем напряжения. Усилитель напряжения соединен с детектором, соединенным с фильтром. Каждый канал датчиков разомкнутого управления, ротации предплечья и биоэлектрического управления соединены с блоками управления кистью и ротацией кисти, где они соединены последовательно с сумматором. На гильзе плеча закреплены задающие датчики управления ротацией плеча, сгибанием предплечья, ротацией предплечья и сгибанием кисти. В исходном положении культи плеча, опущенной вниз, задающий датчик ротации плеча закреплен горизонтально в сагиттальной плоскости, задающий датчик сгибания предплечья закреплен горизонтально во фронтальной плоскости, задающий датчик ротации предплечья закреплен вертикально во фронтальной плоскости в области плечевого сустава. Задающий датчик сгибания кисти закреплен вертикально вдоль гильзы плеча. Роторы поворотных датчиков ротации плеча, сгибания предплечья, ротации предплечья и сгибания кисти каждый неподвижно соединены с первым концом упругих стержней, помещенных в гибкие оболочки, зафиксированные одним концом на гильзе плеча. Вторым концом гибкие оболочки упругих стержней датчиков ротации плеча, сгибания предплечья и ротации предплечья закреплены на наплечнике. Второй конец гибкой оболочки датчика сгибания кисти закреплен на предплечье. Вторые концы упругих стержней оставлены свободными. Датчики системы биоэлектрического управления кистью закреплены на гильзе плеча в зонах максимального сигнала мышц антагонистов – бицепса и трицепса. Изобретение обеспечивает повышение удобства инвалида и сокращение времени выполнения рабочих операций при целенаправленных действиях по самообслуживанию. 4 ил.
Многофункциональный активный протез плеча, содержащий искусственную кисть с электромеханическим приводом и механизмом лучезапястного шарнира, механизм ротации предплечья с электромеханическим приводом, гильзы плеча и предплечья, привод локтевого шарнира с электромеханическим приводом, механизм ротации плеча, систему биоэлектрического управления искусственной кистью и блок питания, отличающийся тем, что в него введены электромеханический привод сгибания кисти и электромеханический привод механизма ротации плеча, наплечник, фиксируемый на корпусе инвалида, соединенный с гильзой плеча и обеспечивающий свободное перемещение надплечья в сагиттальной плоскости, системы позиционного управления ротацией плеча, сгибанием локтя и сгибанием кисти, содержащие каждая поворотные задающий датчик позиционного управления и датчик обратной связи, соединенный с соответствующим исполнительным механизмом, при этом указанные датчики каждой позиционной системы управления соединены с блоками управления, в которых они соединены соответственно с сумматором, который соединен с двумя импульсными преобразователями, соединенными с широтно-импульсным усилителем мощности, который соединен с мотор-редуктором исполнительного механизма, соответственно ротации плеча, сгибания локтя и сгибания кисти, кроме того, система управления ротацией предплечья выполнена независимой на основе разомкнутого принципа управления с использованием двухканального поворотного задающего датчика с чувствительными элементами в виде комплекта двух контактных выключателей, а система биоэлектрического управления кистью также выполнена двухканальной, где задающие датчики, регистрирующие на культе плеча поверхностный потенциал бицепса и трицепса, содержат каждый токосъемник, соединенный с предварительным усилителем напряжения, который соединен с детектором, соединенным с фильтром, причем каждый канал датчиков разомкнутого управления, ротации предплечья и биоэлектрического управления соединены с блоками управления кистью и ротацией кисти, где они соединены последовательно с сумматором, соединенным с двумя импульсными преобразователями, соединенными с широтно-импульсным усилителем мощности, который соединен с мотор-редуктором исполнительного механизма, соответственно кисти и ротации кисти, при этом на гильзе плеча закреплены задающие датчики управления ротацией плеча, сгибанием предплечья, ротацией предплечья и сгибанием кисти, причем в исходном положении культи плеча опущенной вниз задающий датчик ротации плеча закреплен горизонтально в сагиттальной плоскости, задающий датчик сгибания предплечья закреплен горизонтально во фронтальной плоскости, задающий датчик ротации предплечья закреплен вертикально во фронтальной плоскости в области плечевого сустава, кроме того, задающий датчик сгибания кисти закреплен вертикально вдоль гильзы плеча, при этом роторы поворотных датчиков ротации плеча, сгибания предплечья, ротации предплечья и сгибания кисти каждый неподвижно соединены с первым концом упругих стержней, помещенных в гибкие оболочки, зафиксированные одним концом на гильзе плеча, а вторым концом гибкие оболочки упругих стержней датчиков ротации плеча, сгибания предплечья и ротации предплечья закреплены на наплечнике, при этом второй конец гибкой оболочки датчика сгибания кисти закреплен на предплечье, причем вторые концы упругих стержней оставлены свободными, кроме того, датчики системы биоэлектрического управления кистью также закреплены на гильзе плеча в зонах максимального сигнала мышц антагонистов - бицепса и трицепса.
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| US 20150351939 A1, 10.12.2015 | |||
| US 10092423 B2, 09.10.2018 | |||
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ С БИОЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ | 0 |
|
SU396113A1 |

