Изобретение относится к релейноконтактным устройствам для автоматического контроля любой возможной последовательности изменения положения объектов и воспроизведения этой последовательности при возвращении объектов в исходное положение, например лри автоматизации работы лифтов зданий, фильтров насосных стаиций.
Предложенное устройство обеспечивает упрощение схемы для контроля любого практически необходимого числа объектов в измененном положении по сравнению со схемами, составленными с применением шаговых искателей.
Это достигается тем, что для каждого объекта применено одно реле фиксации положения и несколько реле очередности - в количестве, равном максимально возможному количеству контролируемых объектов, находящихся одновременно в измененном положении. При этом реле каждой очередности всех объектов сгруппированы в блоки соответствующей очередности таким образом, что при изменении положенияодного объекта срабатывает его реле первой очереди, при последующем изменении положения другого объекта - его реле второй} очереди, и т. д., а после возврата первого объекта в исходное положение отключается реле второй очереди объекта, изменившего свое положение вторым, и включается его реле первой очереди, и т. д.
На фиг. 1 показана схема блока реле фиксации положения объектов /Ф - УУФ. Каждый объект имеет реле 1Ф(МФ фиксации положения. При изменении положения какоголибо объекта от замыкания контактов К (K....NK.) включается реле Ф фиксации положения данного объекта. При возвращении объекта в исходное ноложение контакты К размыкаются и указанное реле отключается.
Реле Ф через свои контакты воздействуют на реле очередности.
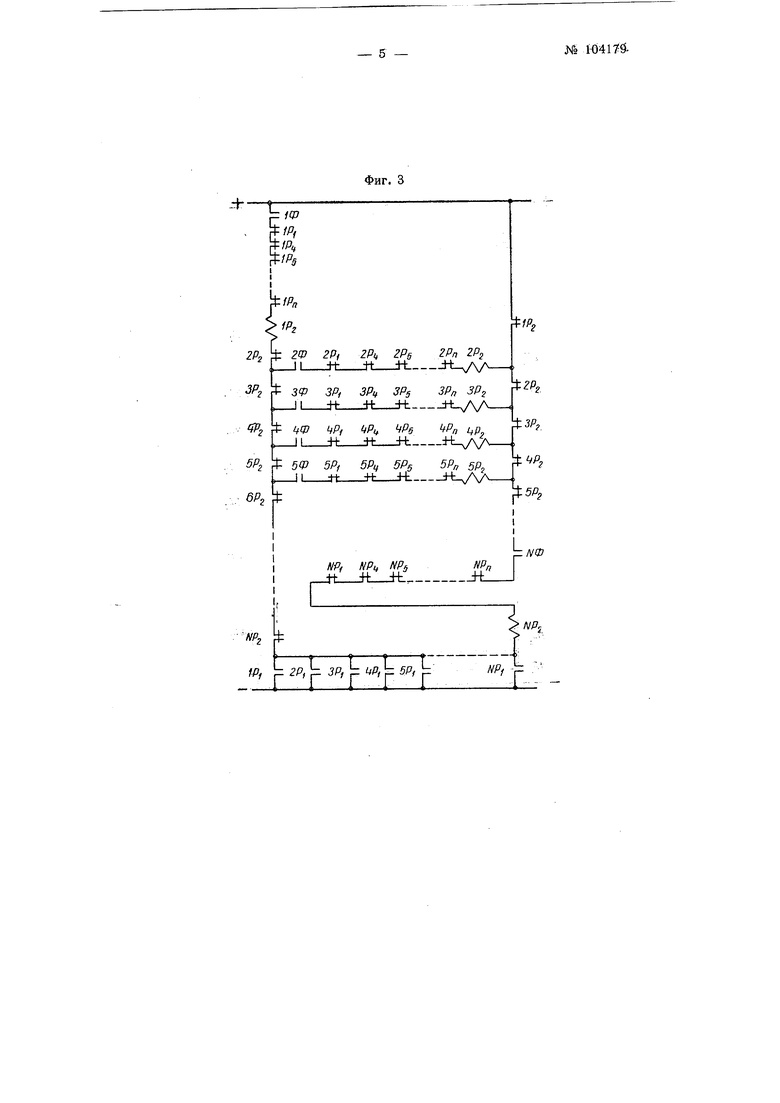
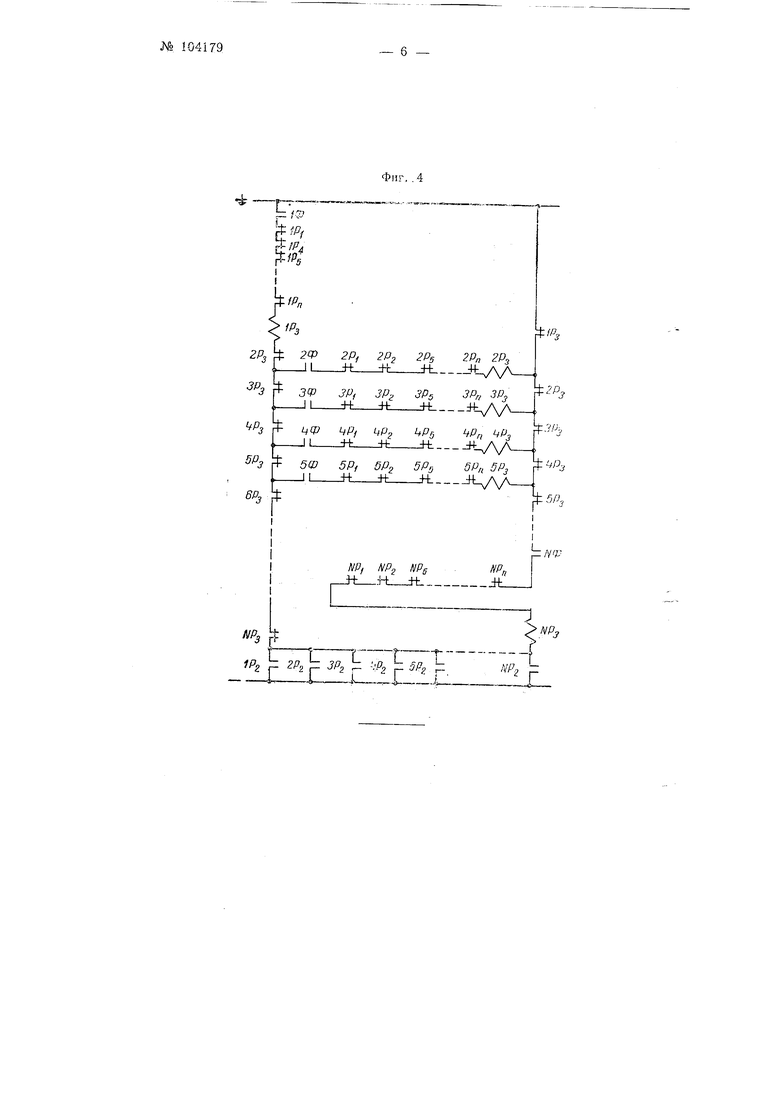
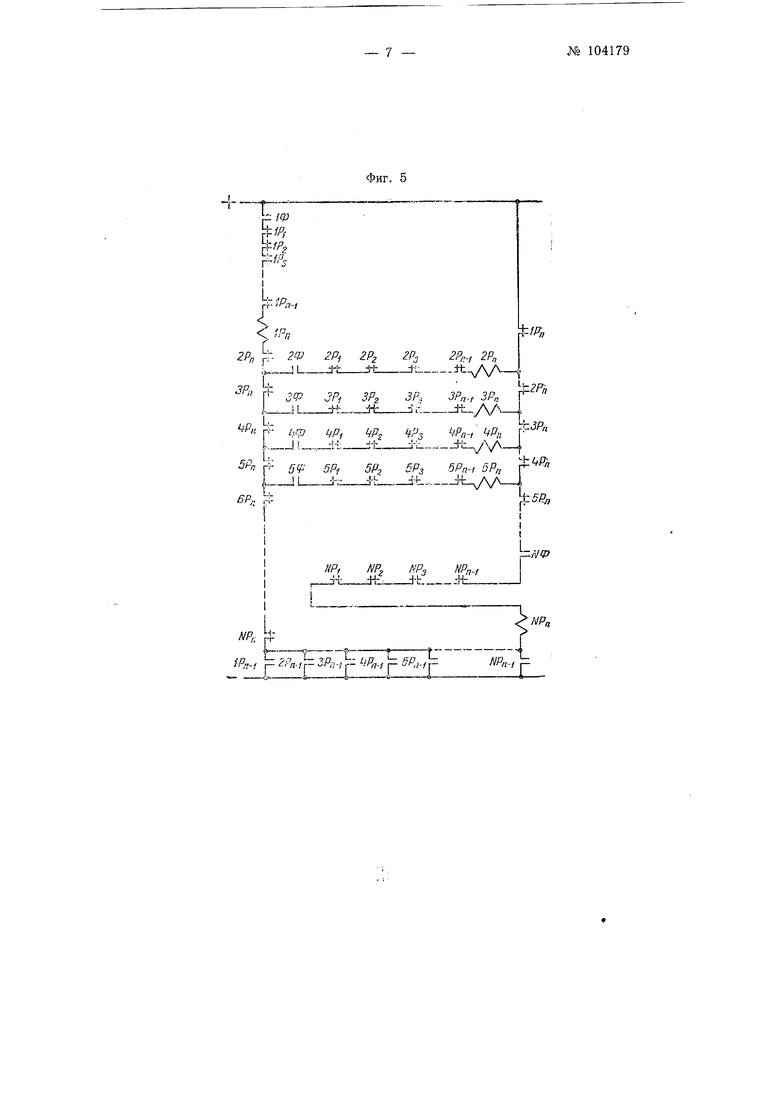
На фиг. 2 показана схема блока реле первой очереди . Реле первой очереди служат для восстановления положения объекта. При включении реле первой очереди какого-либо объекта становится невозможным включение реле первой очереди других объектов и подготавливаются условия для включения реле второй очереди любого другого объекта. После восстановлеНия положения данного объекта отключается его реле первой очере ди и включается реле первой оче реди того объекта, который вторым изменил свое поло кение. На фиг. 3 показана схема блока реле второй очереди 1Р2-ffP2- Эти реле предназначены для возвращения объекта в исходное положение во вторую очередь. При включении реле второй. очереди какого-либо объекта устраняется возможность включения реле второй очереди других объектов и подготавливаются условия для включения реле третьей очереди других объектов. Реле второй очереди отключается поеле восстановления положения объекта первой очереди. На фиг. 4 показана схема блока реле третьей очереди 1Рз-/ /-Рз- Реле этого блока подключают объект на третью очередь восстановления. Когда два объекта находятся з измененном положении, то изменение, положения любого третьего объекта приводит к включению его реле фиксании и реле третьей очереди. Реле третьей очереди от;ключается поеле отключения реле второй очереди. На фиг. 5 показана схема блока реле П--Й очереди i Р,г-NP,,, работающего аналогично блокам предыдущих очередей. Рассмотрим применение устройства для групповой работы четырех объектов. В этом случае устройство должно иметь блок фиксации положения объектов и четыре блока очередности. Предположим, что первыл изменил положение объект 5, вторым - объект /, третьи:у1 - объект 4 и четвертым - объект 2. При изменении положения объекта 5 через контакты ЗК включается реле фиксации 5Ф положения этого объекта {фиг. 1). Реле ЗФ включает реле 3Pi первой очереди третьего объекта, которое соединено с другими объектными реле первой очереди по взаимоисключающей схеме {фиг. 2). Реле 5 разрешает восстановление 3 исходное положение объекта 5 (контакты реле 3Pi вк.чючены в цепь включения объекта). Одновременно через контакты реле 3Pi подготавливается включение блока реле второй очереди {фиг. 3). Затем изменяет положение объект /, через контакты 1К включается реле фиксации /Ф положения объекта. Реле 1Ф включает реле IPz второй очереди (фиг. 3) и подготавливает включение блока реле третьей очереди IPs-ЛФз (фиг. 4). - Третьим изменяет положение объект 4, происходит включение реле фиксации 4Ф и реле очередности 4Ps. Четвертым изменяет положение объект 2, включаются реле фиксации 2Ф- и реле очередности 2Р4. После восстановления положения объекта 3 отключаются реле фиксации ЗФ и реле очередности 3Pi. Вследствие этого у объекта 1, который вторым измеиил положение, произойдет отключение реле второй очереди /А и включение реле первой очереди /Р. Следовательно, объект / подготовлен к возвращению в исходиое положение. Одновременно у объекта 4, который третьим изменил положение, отключается реле третьей очереди и включается реле второй очереди 4Р2. При этом у объекта 2 включается реле третьей очереди и отключается реле четвертой очереди 2Р4 (фиг. 3 и 4). После восстановления в исходное положение объекта / произойдет пере.мешение очередности объектов 4 и 2. Если до восстано-влення положения объекта / снова изменит положение объект 3 или какой-либо другой, то он займет четвертзю очередь. Предмет изобретения Релейно-контактное устройство ля автоматического контроля люой возможной последовательности зменения положения обьектов и оспроизведения этой последовательости гфк возвращении их в исходое положение, отличающееся ем, что, с г.елью упрощения схемы ЛЯ- случая, когда из общего колиества контролируемых объектов в змененном положении может нахоиться любое практическн необходиое количество объектов, для кажого объекта иримеьено одно реле
фиксации пОоТожения и несколько реле очередности - з кОоЧичестве, равном максимально возможному числз объектов, которые могут одновременно находиться в измененном положении, нр;; этом реле каждой очередности всех объекгоз сгрунннрованы в блоки соответствующей очередности таким образом, что при изменении положения одного объекта
срабатывает его реле первой очереди, нрн поат едующем измскенки положения другого объекта - его реле второй очеред, z т. д., а после ьозврата нерзого объег.тг в ис-гсдное положение тгоо,-к:ходнт отключение реле второй очереди объекта, изменизгиего свое положение вторым, и включение его реле нервой очереди, н т. д.
205 2Р,2Р22Р5 2Рп 2Рз
3V ЗР, ЗРп ЗРу
3 р 5Ф 5Р, 5Р2 5Ps 5Рп 5flj BPj 5Р,
Фиг. .4
Р,
4+-И- 44-it, 
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейно-контактное устройство | 1954 |
|
SU104178A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ГЛАДКОСТИ БУМАГИ | 1969 |
|
SU239634A1 |
| ПРОГРАММНОЕ УСТРОЙСТВО ДЛЯ ПРЯДИЛЬНО- АРМИРУЮЩЕЙ МАШИНЫ | 1970 |
|
SU288082A1 |
| Устройство для питания электротермических установок | 1972 |
|
SU437059A1 |
| Устройство для регулирования температуры | 1986 |
|
SU1374195A1 |
| Устройство для автоматического сопровождения целей | 1981 |
|
SU1103687A1 |
| АВТОМАТИЧЕСКИЙ КОНТРОЛЬНО-ПРОПУСКНОЙ ПУНКТ | 1972 |
|
SU435547A1 |
| Программное устройство для управления водоподготовительными фильтрами | 1986 |
|
SU1374181A1 |
| Устройство для регулирования температуры движущихся объектов | 1966 |
|
SU922679A1 |
| Устройство для автоматического выключения электроискрового станка | 1956 |
|
SU112019A1 |


fJP-,
2P, 1 J/7, iz -ip ±: SPf NPn
NP, NPy NPs Н:i-tft.
NPy
-,i.,
