Хк
00 О)
00
Изобретение относится к специали зированной вычислительной и измерительной технике и предназначено для анализа нецентрированных случайных процессов х( , представленных в виде цифровых отсчетов. Известны устройства для вычисления дисперсии стационарных нецентри ров а н ных случай ных,сиг налов, предст ленных в виде отсчетов, содержащие последовательно включенные центрирующий фильтр, квадратор (или блок, ножения ) и блок усреднения(интгера-тор)С1. Наиболее близким по технической сущности является устройство для вы числения дисперсии случайных процес сов, содержащее блок вычитания, выход которого через квадратор подклю чен ко входу интегратора, и блок за держки 2 . i Недостатком известных устройств является низкая точность измерения в условиях ограниченной длительности реализации. . Целью изобретения является повышение точности вычисления дисперсии при ограничениях на требуемую длительность реализации. Указанная цель достигаетс я тем, что в устройство для вычисления дисперсии с;лучайных процессов, содержащее блок задержки, выход которого подключен к первому входу блок вычитания, второй вход которого объ динен со входом блока задержки и яв ляется входом устройства, квадратор выход которого соединен со входом интегратора, выход которого явля,ется выходом устройства, введен цифровой фильтр нижних частот, при этом выход блока вычитания подключе ко входу ЦИФР9ВОГО фильтра нижних частот, выход которого соединен со входом квадратора. Кроме того, цифровой фильтр нижних частот содержит сумматор и регистр, вход которого подключен к выходу сумматора, первый вход которого является входом фильтра, инверс ный выход п-го разряда регистра .соединен со вторым входом сумма то,ра и является выходом фильтра, выход регистра подключен к третьему входу сумматора. На чертеже приведена блок-схема устройства. Устройство содержит блок 1 задержки, блок 2 вычитания, цифровой фильтр 3 нижних частот, квадратор 4 интегратор 5. Цифровой фильтр состоит из сумматора б и регистра 7. Устройство работает следующим образом. При подаче на вход сигнала х на выходр блока 2 вычитания имеем Л ,х - х , на выходе цифрового фильтра 3 нижних частот сигнал .йл,„.г..Ед,,, который является импульсной характеристикой фильтра 3 нижних частот. На выходе интегратора 5 получаем оценку дисперсии 72 x-Nfc-q где , N - объем выборки; Т Мд - длительность реализации, Д- период дискретизации. Центрирование путем создания разности первого порядка, осуществляемое блоками 1 и 2, не является идеальным, и наряду с. устранением постоянной составляющей искс1жает спектр входного сигнала; цифровой фильтр -3 НИЖНИХ частот компенсирует эти иска- |Жения. Оценим погрешность от смещенности оценки дисперсии у , вносимую при центрировании и корректировке. Можно показать, что она равна .ji ±ir см- D. N .,2 - М N-1 / -.2 . ,2N-2p -,«)Г1,,л-(,-й-|г-, (рд)-нормированная автокорреляционная функция сигнала X . Из. предьодущего выражения видно, что выбором параметра А фильтра 3 нижних частот при постоянном л и Т (т.е. при заданной длительности реализации можно сделать погрешность от смещенности,.сколь угодно малой. Пусть, например оу(с) , тогда можно дать следующуюоценку сверху: 2t (1-Л)Г ( Nd где. интервал корреляции П I-T iTi -rTtTi T / TiTIJatTa входного Сигнала. Выбрав Л е , получим т.е. выбором /3 и Т независимо от & можно эффективно обеспечить заданную .д, или, с другой стороны, при заданном Т выбором р обеспечить возможно малую JCM Алгоритм работы цифрового фильтр .нижних частот описывается следующим разностным уравнением: - соответственно выходн и входной сигналы фильтра} N..i. , где Т. - параметр фильтра(постоянная времени). Запишем уравнение относительно Z . N - сигнала перед регистром )K Если выбирать параметр фильтра из условия М 2 V то беря сигнал с инверсного п-ЕО старшего разряда регистра 7, получим возможность ) . 2 N } получения сигнала ;---2 и i - Д 2 1 формирования в сумматоре 6 разности сигнала с выхода регистра, сиг и входного сигнала п 1эл.. V n-L пала «л .(. обеспечивающую работу фильтра. Итак, выбор параметра фильтра осуществляется из условия обеспечения требуемой погрешности от смещенности оценки дисперсии, а для возможности упрощения технического решения выбирается ближайшее к оптимальному (требуемому) значение N 2. Устройство имеет в сравнении с известными устройствами более высокую точность измерения в силу получения возможности уменьшения погрешности от смещенности без увеличения периода дискретизации и увеличения требуемой длительности реализации (или увеличения дисперсии оценки дисперсии ), а лишь путем соответствующего выбора параметров цифрового фильтра нижних частот. Дисперсия оценки при этом имеет тот же порядок, что и в известных устройствах. Соблюдение условия N-1 2 позволяет существенно упростить схему реализации фильтра за счет отказа от блоков уг-шожения {или деления К
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ОБНАРУЖИТЕЛЬ РАДИОСИГНАЛОВ В УСЛОВИЯХ ШУМА НЕИЗВЕСТНОЙ ИНТЕНСИВНОСТИ | 2014 |
|
RU2563889C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ СТАТИСТИЧЕСКИХ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ СИГНАЛОВ | 2017 |
|
RU2662412C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ОТНОШЕНИЯ СИГНАЛ/ШУМ | 2007 |
|
RU2341808C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| Устройство для определения дисперсии | 1979 |
|
SU960844A1 |
| Устройство для вычисления дисперсии случайных процессов | 1980 |
|
SU877575A2 |
| Комплексное устройство контроля параметров | 1988 |
|
SU1520482A1 |
| Устройство для цифрового анализа частоты сигналов | 1991 |
|
SU1809403A1 |
| АДАПТИВНЫЙ ДВУХПОРОГОВЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ ЦИФРОВОГО ПАНОРАМНОГО ПРИЕМНИКА МОДУЛЬНОГО ТИПА | 2013 |
|
RU2524551C1 |
| Устройство для цифровой фильтрации | 1981 |
|
SU957416A1 |
1. УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ДИСПЕРСИИ СЛУЧАЙНЫХ ПРОЦЕССОВ/ содержащее блок задерзкки, выход которого подключен к первому входу бло-. ка вычитания, вт-орой вход которого объединен со уходом блока задержки и является-входом устройства, квадратор, выход которого соединен со входом интегратора, выход которого является выходом устройства, о т л и 1ающееся тем, что, с целью повышения/точности, в устройство введен цифровой фильтр нижних частот, при этом выход блока вычитания подключен ко входу цифрового фильтра нижних частот, выход которого соединен со входом квадратора. 2, Устройство по П.1, о т л и ч аю щ е е с я тем, что цифровой фильтр нижних частот содержит сумматор и регистр, вход которого подключен к выходу сумматора, первый вход которого является входом фильтра, инверс- ный выход г -го разряда регистра (Л соединен со вторым входом сумматора и является выходом фильтра, выход с регистра подклнзчен к третьему входу сумматора.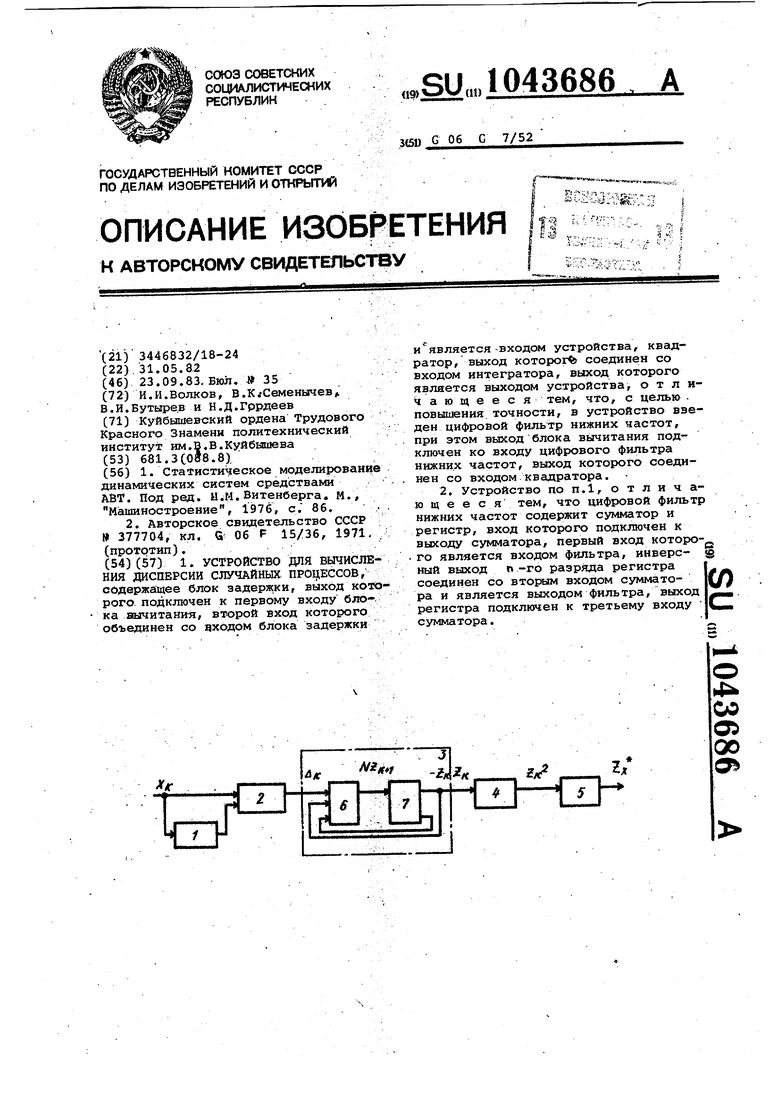
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| статистическое моделирование динамических систем средствами АВТ | |||
| Под ред | |||
| Н.М | |||
| Витенберга, М., Машиностроение, 1976, с | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ДИСПЕРСИИ СЛУЧАЙНЫХ | 0 |
|
SU377704A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
