С
Ф$г Ф5 /7
&/е.1
Изобретение относится к радиоизмери- тёльной технике и может быть использовано в РЛС в системах траекторией обработки для определения скорости и ускорения объектов по измерениям частоты Доплера.
Целью изобретения является повышение точности оценки параметров функции частоты сигнала путем обработки замеров по методу наименьших квадратов и определение достоверности полученных оценок для более эффективной последующей вторичной (траекторной) обработки.
Поставленная цель достигается тем, что в известное устройство (блок 1), содержащее формирователь нуль-пересечений 1-1, делитель 1-2, ключ 1-3, регистр накопления массивов 1-4, буферный регистр 1-5, датчик сигналов времени 1-6, вместо формирователя разностей, измерителя производной, блока коррекции массивов и измерителя частоты введены блок оценки частоты 2, блок вычисления дисперсии 3 и пороговый блок 4. Блок 2 подключен к выходу блока 1 и содержит 1-й - 6-й умножители на константу 2-1, 2-6,2-7,2-8, 2-9, 2-12, формирователь номера замера i 2-2, перемножитель 2-3,
1-й - 3-й накапливающие сумматоры 2-4,
2-5, 2-13, 1-й и 2-й блоки вычитания 2-10, 2-11, сумматор 2-14. Блок вычисления дисперсии 3 подключен к выходу блока 2-1 и содержит последовательно соединенные блок вычитания 3-1, блок возведения в квадрат 3-2, накапливающий сумматор 3-3 и умножитель 3-4. Пороговый блок 4 подключен, к выходу блока 3.
На выход устройства для последующей траекторной обработки поступают оценки параметров частоты f0 и f (с выхода блока 2); значения дисперсии замеров S , характеризующие точность полученных оценок (с выхода блока 3),и сигнал превышения порога (с выхода блока 4), при наличии которого оценки считаются грубыми и не должны использоваться при построении траектории.
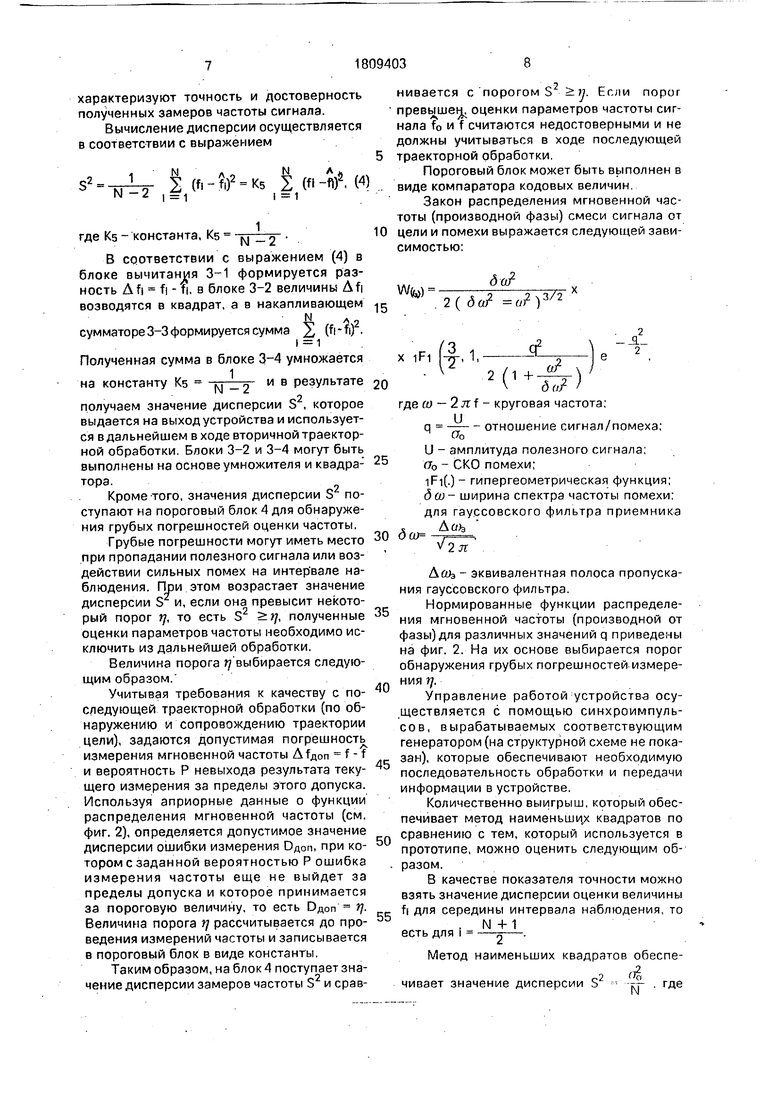
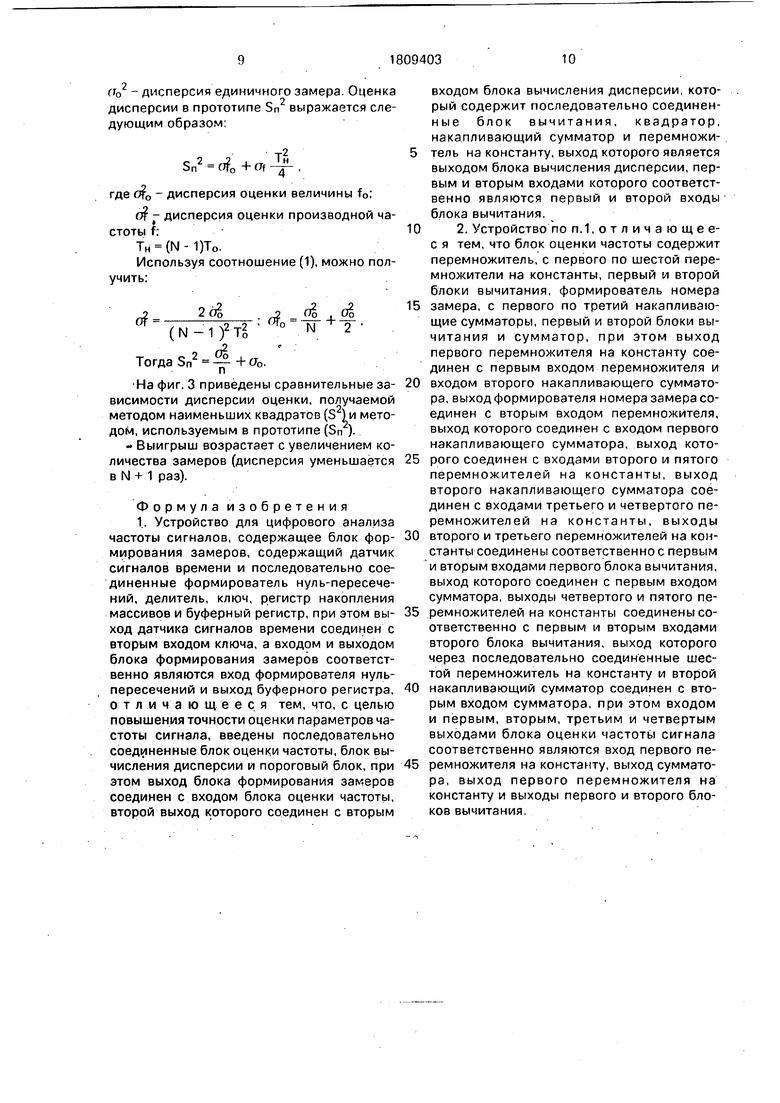
На фиг, 1 приведена структурная электрическая схема предложенного устройства; на фиг. 2 - нормированные функции распределения мгновенной частоты {для различных значений отношения сигнал/помеха д); на фиг.З приведены сравнительные за- ВИСИМ.ОСТИ дисперсии оценки, получаемой методом наименьших квадратов в предлагаемом устройстве и методом, используемым в прототипе.
Устройство работает следующим образом.
В блоке 1 формирования замеров в течение каждого интервала наблюдения по входному сигналу формирователь 1-1 вырабатывает короткие импульсы в моменты
времени, соответствующие положительным (или отрицательным) переходам напряжения входного сигнала через нулевой уровень (моменты реализации нуль-пересечений). Делитель 1-2 прореживает в m раз поступающий на его вход поток импульсов. Импульсы с выхода делителя 1-2 являются сигналами записи чисел, соответствующих моментам времени их реализации, с выхода
0 датчика 1-6 в регистр 1-4. Запись осуществляется через ключ 1-3, открывающийся в моменты реализации нуль-пересечений. В течение каждого очередного интервала наблюдения Тн в регистре 1-4 фиксируется
5 выборка объемом N нуль-пересечений:
Щ, П2,...П|...ПМ.
По окончании интервала наблюдения Тн осуществляется перезапись содержимого регистра 1-4 в буферный регистр 1-5, после 0 чего цикл аналого-цифрового преобразования повторяется (например, в очередных тактах работы РЛС).
В блоке 2 производится оценка сгла- кенных значений частоты входного сигнала 5 fj и параметров функции ее изменения: f0 - начального значения, и f - производной, по выборке замеров нуль-пересечений ni, где f| To + ft|.
Чтобы обеспечить минимальные ошиб- 0 ки в Оценке параметров, используется ме- тод наименьших квадратов.
Применимость данного метода обусловлена тем, что в большинстве случаев наблюдения ш являются независимыми, а 5 погрешности единичных замеров распределены по нормальному закону с нулевым средним и дисперсией т02.
Даже если распределение ошибок неизвестно, решение, полученное методом наи- 0 меньших квадратов, дает несмещенную оценку с минимальной дисперсией.
Замеры щ последовательно (т. ,... пм) из буферного регистра 1-5 поступают на умножитель 2-1. Съем информации может 5 осуществляться с помощью синхроимпульсов.
В блоке 2-1 производится пересчет замеров нуль-пересечений в значения мгновенной частоты сигнала 0
П|
f|
То
ni(N-1);
- щ К.О
I hi
где Т0 - интервал накопления 1-го замера ni (дискретность времени отсчета):
т - Ти i/ - 1 Т° Ко То
константа.
Блок 2-1 может быть выполнен в виде умножителя щ на константу К0.
Значения fi последовательно поступают на схему обработки, реализующую метод наименьших квадратов (блоки 2-2...2-11) и на блок 3 вычисления дисперсии.
В соответствии с методом наименьших квадратов, оценки определяются по формулам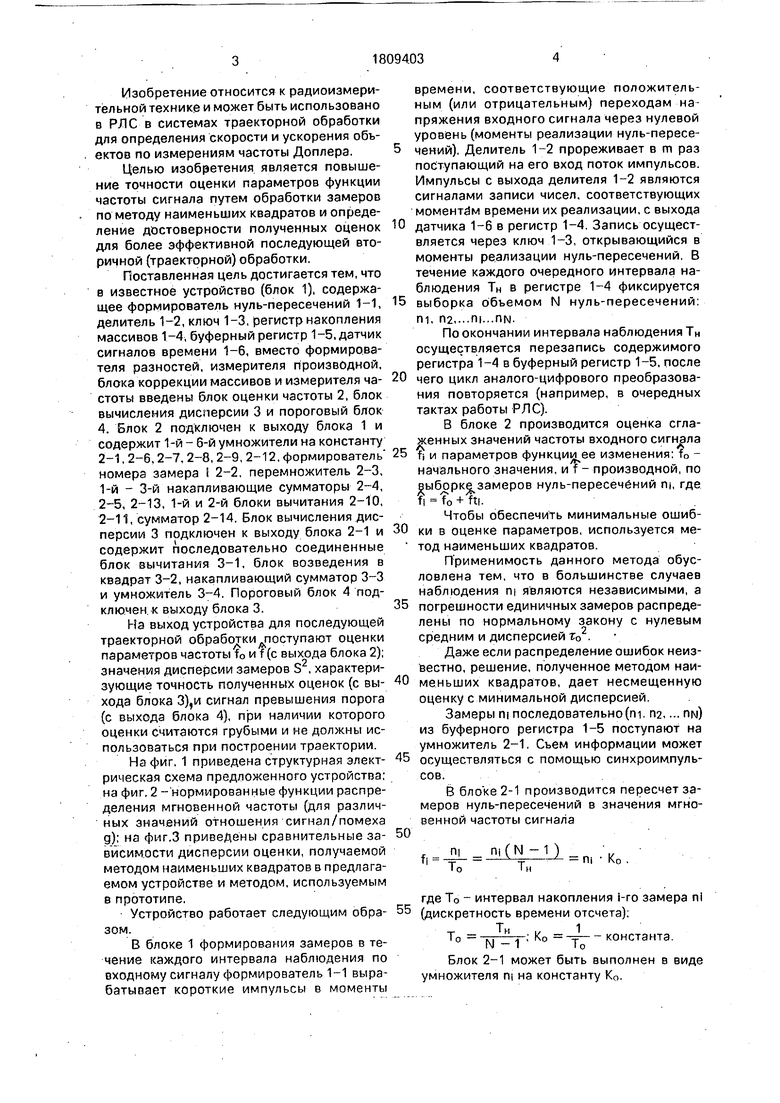

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ И РАЗНОСТИ ЧАСТОТ СИГНАЛОВ | 1992 |
|
RU2025738C1 |
| Анализатор спектра | 1989 |
|
SU1651226A1 |
| ИЗМЕРИТЕЛЬ ОТНОШЕНИЯ СИГНАЛ-ШУМ | 1992 |
|
RU2117954C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ОТНОШЕНИЯ СИГНАЛ/ШУМ | 2007 |
|
RU2341808C1 |
| Устройство для адаптивного скользящего сглаживания | 1987 |
|
SU1529246A1 |
| СПОСОБ МНОГОПАРАМЕТРИЧЕСКОГО СЛЕЖЕНИЯ ЗА НАВИГАЦИОННЫМИ СИГНАЛАМИ И ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С МНОГОПАРАМЕТРИЧЕСКИМ УСТРОЙСТВОМ СЛЕЖЕНИЯ ЗА СЛАБЫМИ СИГНАЛАМИ В УСЛОВИЯХ СВЕРХВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2012 |
|
RU2551805C2 |
| АДАПТИВНЫЙ ОБРАЩАЮЩИЙ ФИЛЬТР | 1994 |
|
RU2086999C1 |
| Устройство для магнитно-импульсной обработки деталей | 1973 |
|
SU470251A1 |
| Адаптивный измеритель параметров сигнала | 1981 |
|
SU970251A1 |
| Нелинейный корректор многолучевого сигнала | 1984 |
|
SU1197096A2 |

Сущность изобретения: устройство содержит 1 блок формирования замеров (1), 1 блок оценки частоты (2), 1 блок вычисления дисперсии (3) и пороговый блок (4). 1-2-3-4. 1 з.п.ф-лы, 3 ил.
NN N N
(2t)-(2f.)-(2t,)-(2 t,f.)
Vj 1 /
N
A
-
N i -( i t, )2
1 1 м 1
NN N
2 t,f,-( 2 t,) ( 2 f. ) 1 м 1 /xi i 7
NN
где fi - замеры частоты сигнала в моменты времени.
Принимая ti 0; ti+i - ti Т0; ti (i - 1)T0, после соответствующих преобразований получим для значений оценок следующие выражения:
NN
fo Ki 2 fi-K22 fi;
1 1i 1
A NN
f Ka I, fi-K4Ј ifi.
1
где Ki, K2, Кз, К4- константы, определяемые по формулам:
(TsT-2) (3 N - 1 У
10 N-2
N(N -2 ) (3 N - 1 ) .
6 ( N + 1 у
T0(N -1 ) (N -2) (3N -1 )
T0(N-1)(N-2)(3N-1)
Так как обьем выборки известен, расчет и запись констант производится заранее, до проведения измерений.
Алгоритм вычисления оценок реализуется в схеме следующим образом. В блоке 2-3 формируются произведения ifi путем перемножения последовательно поступающих значений частоты fi на номер замера i. Значения I 1, 2, ... N формируются в блоке 2-2, который может быть выполнен в виде счетчика синхроимпульсов, используемых для считывания замеров из буферного регистра 1-5.
(2)
N
NN
2 rf-( 2 )
1 1. vi i x
С помощью накапливающих сумматоров 2-4 и 2-5 формируются суммы
Ifi
I
i -
I 1
fi. Блоки 2-6, 2-7, 2-8 и 2-9 обеспе3)
чет ее,
зуокетем аюа i. оке иде ых ги25
ые
30
35
40
50
чивают умножение полученных сумм на соответствующие константы Ki, К2, Кз. K-q. Выполнение данных блоков аналогично блоку 2-1, Окончательно оценки параметров f о и f будут формироваться в соответствии с соотношениями (3) на выходе блоков вычитания 2-10 и 2-11. Далее они поступают на выход устройства, а также на схему формирования оценок сглаженных значений частоты fi, состоящую из блоков 2-12, 2-13,2-14.
/V
Значения fi вычисляются по формуле
АЛЛА А А
fi fo + tif - fo + (I - 1)T0f fo + (i - 1)K0f, где Ко ----
I о
TH
В блоке умножителя 2-12 формируется значение K0f. а в блоке накапливающего сумматора .3 - значения (i - 1)К0т путем последовательного накопления величин КоТ то есть 0, K0t 2K0t ... (N - 1)K0f . Блок 2-12 5 может быть выполнен на основе умножителя, а блок 2-13 - на основе накапливающего сумматора.
Окончательно оценки текущих значений частоты fj формируются на выходе сумматора 2-14 путем сложения составляющих Т0, поступающих с блока 2-10 и значений (i - 1)КоТ:
55
Л ЛI
fi f,, + («- 1)K0f.
Значения оценок fj выдаются на вычисления дисперсии, на который с блока 2-1 поступают также результаты текущих замеров частоты fj. Значения дисперсии S
характеризуют точность и достоверность полученных замеров частоты сигнала.
Вычисление дисперсии осуществляется в соответствии с выражением
S(f.-fi)2 K5 1 1
I 1
(fi -fl)fi, (4)
где Ks- константа, КБ N 2
В соответствии с выражением (4) в блоке вычитания 3-1 формируется разность Afi fi - fi, в блоке 3-2 величины Afi возводятся в квадрат, а в накапливающем
сумматоре 3-3 формируется сумма 2) (fi-fi)2.
1 1 Полученная сумма в блоке умножается
на константу Ks N 2 и в результате
получаем значение дисперсии S2, которое выдается на выход устройства и используется в дальнейшем в ходе вторичной траекторией обработки. Блоки 3-2 и 3-4 могут быть выполнены на основе умножителя и квадра: тора.
Кроме того, значения дисперсии S поступают на пороговый блок 4 для обнаружения грубых погрешностей оценки частоты.
Грубые погрешности могут иметь место при пропадании полезного сигнала или воздействии сильных помех на интервале наблюдения. Пои этом возрастает значение дисперсии S и, если она превысит некоторый порог ц, то есть S2 /, полученные оценки параметров частоты необходимо исключить из дальнейшей обработки.
Величина порога выбирается следующим образом.
Учитывая требования к качеству с по- следующей траекторией обработки (по обнаружению и сопровождению траектории цели), задаются допустимая погрешность измерения мгновенной частоты Лтдоп f - f и вероятность Р невыхода результата теку- щего измерения за пределы этого допуска. Используя априорные данные о функции распределения мгновенной частоты (см. фиг. 2), определяется допустимое значение дисперсии ошибки измерения Одоп, при ко- тором с заданной вероятностью Р ошибка измерения частоты еще не выйдет за пределы допуска и которое принимается за пороговую величину, то есть ОДОп г. Величина порога / рассчитывается до про- ведения измерений частоты и записывается в пороговый блок в виде константы.
Таким образом, на блок 4 поступает значение дисперсии замеров частоты Sz и срав- чивает значение дисперсии S
нивается с порогом S2 п. Если порог превышен оценки параметров частоты сигнала f о и f считаются недостоверными и не должны учитываться в ходе последующей траекторией обработки.
Пороговый блок может быть выполнен в виде компаратора кодовых величин.
Закон распределения мгновенной частоты (производной фазы) смеси сигнала от цели и помехи выражается следующей зависимостью:
Wfc)
да
2 (да )3/2
iFi
Т 1
сг1
1 +
а да
- Л 2
где ш - 2 nf - круговая частота;
п -- - отношение сигнал/помеха;
7о
U - амплитуда полезного сигнала; оь - СКО помехи;
iFi(.) - гипергеометрическая функция; ширина спектра частоты помехи; для гауссовского фильтра приемник
« Дадэ
бон , ,
Д(УЭ - эквивалентная полоса пропускания гауссовского фильтра.
Нормированные функции распределения мгновенной частоты (производной от фазы)для различных значений q приведены на фиг. 2. На их основе выбирается порог обнаружения грубых погрешностей измерения ц.
Управление работой устройства осуществляется с помощью синхроимпульсов, вырабатываемых соответствующим генератором (на структурной схеме не показан), которые обеспечивают необходимую последовательность обработки и передачи информации в устройстве.
Количественно выигрыш, который обеспечивает метод наименьших квадратов по сравнению с тем, который используется в прототипе, можно оценить следующим образом.
В качестве показателя точности можно взять значение дисперсии оценки величины fi для середины интервала наблюдения, то
бСТЬ ДЛЯ I - --я--.
Метод наименьших квадратов обеспе %
-w . где
f o2 дисперсия единичного замера. Оценка дисперсии в прототипе Sn выражается следующим образом:
Sn2 +
Of
ТЙ
где - дисперсия оценки величины f0;
о - дисперсия оценки производной частоты f;
TH (N-1)T0.
Используя соотношение (1), можно получить:
202,
Дт2
(М-1)о
Оо . oS
N
+
Тогда Sn
d
+ а0.
На фиг. 3 приведены сравнительные зависимости дисперсии оценки, получаемой методом наименьших квадратов(S2fи методом, используемым в прототипе (Sn ).
- Выигрыш возрастает с увеличением количества замеров (дисперсия уменьшается в N + 1 раз).
Формула изобретения 1. Устройство для цифрового анализа частоты сигналов, содержащее блок формирования замеров, содержащий датчик сигналов времени и последовательно соединенные формирователь нуль-пересечений, делитель, ключ, регистр накопления массивов и буферный регистр, при этом выход датчика сигналов времени соединен с вторым входом ключа, а входом и выходом блока формирования замеров соответственно являются вход формирователя нуль- пересечений и выход буферного регистра, отличающееся тем, что, с целью повышения точности оценки параметров частоты сигнала, введены последовательно соединенные блок оценки частоты, блок вычисления дисперсии и пороговый блок, при этом выход блока формирования замеров соединен с входом блока оценки частоты, второй выход которого соединен с вторым
входом блока вычисления дисперсии, который содержит последовательно соединенные блок вычитания, квадратор, накапливающий сумматор и перемножи- 5 тель на константу, выход которого является выходом блока вычисления дисперсии, первым и вторым входами которого соответственно являются первый и второй входы блока вычитания.
0 2. Устройство по п.1,отличающее- с я тем, что блок оценки частоты содержит перемножитель, с первого по шестой перемножители на константы, первый и второй блоки вычитания, формирователь номера
5 замера, с первого по третий накапливающие сумматоры, первый и второй блоки вычитания и сумматор, при этом выход первого перемножителя на константу соединен с первым входом перемножителя и
0 входом второго накапливающего сумматора, выход формирователя номера замера соединен с вторым входом перемножителя, выход которого соединен с входом первого накапливающего сумматора, выход кото5 рого соединен с входами второго и пятого перемножителей на константы, выход второго накапливающего сумматора соединен с входами третьего и четвертого перемножителей на константы, выходы
0 второго и третьего перемножителей на константы соединены соответственно с первым и вторым входами первого блока вычитания, выход которого соединен с первым входом сумматора, выходы четвертого и пятого пе5 ремножителей на константы соединены соответственно с первым и вторым входами второго блока вычитания, выход которого через последовательно соединенные шестой перемножитель на константу и второй
0 накапливающий сумматор соединен с вторым входом сумматора, при этом входом и первым, вторым, третьим и четвертым выходами блока оценки частоты сигнала соответственно являются вход первого пе5 ремножителя на константу, выход сумматора, выход первого перемножителя на константу и выходы первого и второго блоков вычитания.
2 Ч
О 1 pve.2
ZЈa) 0 fOO 200 300 400 500
flt/г.З
| Кукин В.Д | |||
| Электрорадиоизмерения | |||
| М.: Радио и связь, 1985, с | |||
| Водяные лыжи | 1919 |
|
SU181A1 |
| Устройство для цифрового анализа сигналов | 1978 |
|
SU687427A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
