/-U
о: сз:
со

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИССЛЕДОВАНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089896C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ СО СЛОЖНЫМ ЗАКОНОМ МОДУЛЯЦИИ | 2001 |
|
RU2293356C2 |
| Многоканальное устройство для определения координат развивающейся трещины | 1976 |
|
SU574669A2 |
| Устройство для автоматического контроля больших интегральных схем | 1984 |
|
SU1205083A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2013785C1 |
| Способ регистрации временного акустического разреза и устройство для его осуществления | 1985 |
|
SU1323991A1 |
| Устройство для определения местоположения источника акустической эмиссии | 1987 |
|
SU1499224A1 |
| Многоканальное устройство для определения координат источников акустических сигналов | 1985 |
|
SU1259179A1 |
| Многоканальное устройство для определения координат развивающейся трещины | 1979 |
|
SU894556A1 |
| МЕТКА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И КОНТРОЛЯ ОБЪЕКТОВ | 2007 |
|
RU2371734C2 |
МНОГОКАНАЛЬНОЕ УСТРОЙСТВО .ДЛЯ КОНТРОЛЯ КООРДИНАТ РАЗВИВАКЯЯИХ.СЯ ТРЕЩИ, содержащее п блоков конт- роля зоны из пapaллeJlьнfcJx каналов измерения, включающих .последовательно соединенные датчик, усилитель с фильтром, формирователь импульсов и измеритель временных задержек, коммутатор, вычислитель координат и регистратор, отличающеес я тем, что, с целью повышения достоверности определения координат одновременно. развивающи5 ся трещин, каждый из блоков контроля зоны снабжен первым, вторым и третьим блоками идентификации и выполнен из четырех каналов измерения, попарно подключенных к первому и второму блокам идентификации, соединенньам с входами третьего блока идентификации, последовательно соединенными блоком g ,памяти, вычислительным блоком, блоком сравнения и блоком совпадения, W второй вход которого соединен с выходом вычислительного блока, а выход третьего блока идентификации , (Соединен с входом блока памяти.
IfZ. 1
Изобретение относится к неразрушающему контролю качества материалов и может быть применено для определения координат дефектов при эксплуатации и при проведении прочностных испытаний объектов,
Известно многрканальное устройство для определения координа развивающихся- трещин которое состоит из И, но не менее трех измерительных каналов. Каждый канал измерения содержит последовательно включенный датчик, усилитель с пороговым устройством, логический элемент НЕ, Соединенный другим входом с логичесКИМ элементом ИЛИ, а выходом с тремя триггерами. Кроме,того, устройств содержит рбщи€ элементы для всех каналов измерения: шифратор/ к выходу которого последова1тельно подключе|НЫ коммутатор, соединенный другими входами с двумя измерителями интервгшов времени, входо: которы.х подкхвоч ны к схеме объединения через схе- му-задержки и к счетчрку, согласующий блок, электронно-вычислительный блок и регистратор l .
Недостатком этого устройства явЛяется низкая достоверность контроля.,, . . , . Наиболее близким по технической сущности к изобретению является многоканальное устройство для контроля координат развивакяцихся трещин, содержащее п блоков контроля зоны из параллельных каналов измерения, включенных последовательно соединен iffiie датчик,: усилитель с фильтром, формирователь импульсов и измерител временных задержек,коммутатор, вы;числитель координат и регистратор 2 . .
Недостатком дайного устройства является невозмо.жность определения координат одновремейно развивающихся трещин.. ,
Цель изобретения - понишение до; стрверности определения координат одновременноразвивающихся трещин.
, Поставленная цель достигается .тем, что в многоканальном устройствё для контроля координат развивающихся трещин, содержащем п блоков контроля зоны из ттараллельных каналов Измерения, включающих последовательно соединенные датчик, усилитель с фильтром форкшрователь импульсов и измеритель временных задержек/ коммутатор, вычислитель координат и регистратор, каждый из блоков контроля зоны первым вторьо 1 и Третьим блокгши идеятифика цИи и выполнен из четарёх каналов измерения, попарно подключёиных к первому и второму блокгм иденти фикаЦии, соединёяным с входами третьего блока идентификации последовательно соединенными блоком памяти, вычислительным.блоком, блоком срав.нения и блоком совпадения, второй вход которого соединен с выходом вычислительного блока, а выход третьего блока идентификации соединен с входом блока пгиляти.
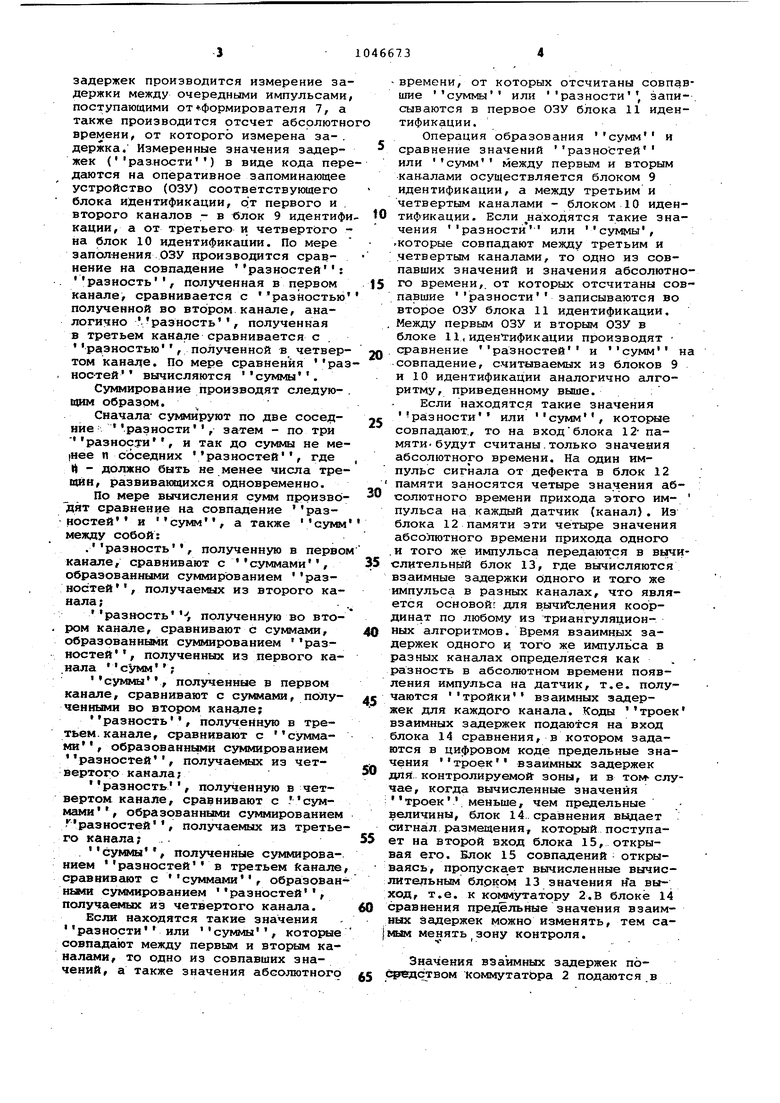
На фиг.1 представлена блок-схема многоканального устройства для контр ля координат развивающихся трещин; на фиг .2 - блок-схема блока контроля, зоны.
Многоканальное устройство для . контроля координа:т .развивающихся трещин содержит блоки 1 контроля зон выходы которых подключены к входам коммутатора 2, который последовательно соединен с ычислителём 3 координат и регистратором 4. .
Каждый из блоков 1 контроля зон содержит четыре канала измерения, каждый из которых состоит из последовательно соединенных датчика 5, усилителя б с фильтром, формирователя 7 Импульсов и измерителя 8 вре(менных задержек, причём выход измерителя 8 временных задержек является выходом канала; Кроме того, блок 1 контроля .зоны содержит первый, второй и третий, соответственно 9, 10 И 11 блоки идентификации, к первому и BTopoi v в-ходам первого блока идентификации подключены соответственно выходы первого и второго каналов, а к первому и второму входам второго блока 10 идентификации подключены выходы третьего и чет- , вертого каналов. Выходы блоков 9 и 10 идентификации соединены соответственно с первьвд и вторым входа ш третьего блока 11 идентификации, выход которого соединен с блоком 12 памяти/ Выход блока 12 памяти сое ди{1е1Н с вычислительным блоком 13, в свою очередь, выход вы4ислительного блока 13 подключён и к входу блока 14 сравненияи к первому входу блока 15 совпадений.. Выход блока 14 срариения соеданен ,с вторым входсж блока 15 совпадений, выход которого является выходом блока l контроля
зоны..
Устройство patfoTaefT следу10111и1 Ьиразом. .,
: При во9иикиовеяии вояи напряжеиия в йссле;Е(уёмом обЬекте в резулЁтате развития пластической- деформёщии или воэникиовеиии «1кро-или макродефектов (трещин) волны, достигая датчиков 5,.. преобразуются в электрический сигнал, усиливаются усилителем б с фильтром Усиленные и отфильтрован ине сигналы-формируются.фощлирЬвателямй 7 в нормироваяные имяул| сы. Далее импульсы поступают на вход измерителя в временишс задержек в каждон кайгше. В измерителе 8 временных задержек производится измерение за держки между очередными импульсами поступающими от формирователя 7, а также производится отсчет абсолютн времени, от которого измерена за- . держка. Измеренные значения задержек (разности) в виде кода пер даются на оперативное запоминающее устройство (ОЗУ) соответствующего блока идентификации, от первого и второго каналов - в блок 9 идентиф кации, а от третьего и четвертого на блок 10 идентификации. По мере заполнения ОЗУ производится сравнение на совпадение разностей: разность, полученная в первом канале, сравнивается с разйостью полученной во втором канале, аналогично .разность, полученная в третьем канале сравнивается с разностью, полученной в четвер том канале. По мере сравнения ра нос-тей вычисляются суммы. Суммирование производят следующим образом. Сначала- суммируют по две соседние разности, затем - по три разносуи , и так до суммы не ме (Нее «соседних разностей, где Ц - должно быть не менее числа тре идан, развивакхцихся одновременно. По мере вычисления сумм прризвб яят сравнение на совпадение разностей и сумм, а также сумм между собой: .разность, полученную в перво канапе, сравнивают с суммами, образованными суммированием разностей, получаемых из второго канала;разность-, полученную во втором канале, сравнивают с суммами, образованны14и суммированием разностей, полученных из первого канала сумм суммы, полученные в первом канале, сравнивают с суммами, полученными во втором канале; разность, полученную в третьем, канале, сравнивают с суммами , образованными суммированием разностей, получаемых из четвертого канала; разность, полученную в четвертом канале, сравнивают с .суммами, образованными суммированием . разностей, получаемых из третье го канала; . . суммы, полученные сууолярованием разностей в третьем Канале сравнивают с суммами, образован ньми суммированием разностей, получаемых из четвертого канала. Если находятся такие значения разности или суммы , котоЕ ае совпадают между первым и вторым каналами, то одно из совпавших значений, а также значения абсолютного времени, от которых отсчитаны совпавшие суммы или разности, запи-, сываются в первое ОЗУ блока 11 идентификации. Операция образования сумм и сравнение значений разностей или сумм между первым и вторым каналами осуществляется блоком 9 идентификации, а между третьим и четвертым каналами - блоком 10 идентификации. Если находятся такие значения разности или суммы, -которые совпадают между третьим и четвертым каналами, то одно из совпавших значений и значения абсолютного времени,, от которых отсчитаны совпавшие разности записываются во второе ОЗУ блока 11 идентификации. Между первым ОЗУ и вторым ОЗУ в блоке 11, иден гификации производят сравнение разностей и сумм на совпадение, считываемых из блоков 9 и 10 идентификации аналогично алгоритму, приведенному выше. : Если находятся такие значения разности или сумм, котоЕ«ле совпадают., то на входблока 12- памяти-будут считаны.только значения абсолютного времени. На один импульс сигнала от дефе1ста в блок 12 памяти заносятся четыре зна.чения абсолютного времени прихода этого импульса на каждый датчик (канал). Из блока 12 памяти эти четыре значения абсолютного времени прихода одного .и того же импульса передаются в вычислительный блок 13, где вычисляются взаимные задержки одного и того же импульса в разных каналг1х, что является основой; для вычисления координат по любому из триангуляционных алгоритмов. Время взаимных задержек одного и. того же импульса в разных каналах определяется как разность в абсо.шотном времени появления импульса на датчик, т.е. полу-тройкичаются взаимных задержек для каждого канала. Коды троек взаимных задержек подаются на вход блока 14 сравнения, в котором задаются в цифровом коде предельные значения троек взаимных задержек для контролируемой зоны, и в том случае, когда вычисленные значения троек., меньше, чем предельные величины, блок 14 сравнения выдает сигнал размещения, который поступает на второй вход блока 15, открывая его. Блок 15 совпадений открываясь, пропускает вычисленные вычислительным блоком 13 значения rfa выход, т.е. к коммутатору 2.В блоке 14 сравнения предельные значения взаимных Задержек можно изменять, тем самым менять зону контроля. ч- . . Значения взаимных задержек посредством коммутатора 2 подаются.в
виде цифрового кода в вычислитель 3 координат, а вычисленные значения координат каждой трещины фиксируются регистратором 4.
Использование предлагаемого устройства позволяет увеличить достоверность информации о координатах развивающихся трещин.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Многоканальное устройство для определения координат развивающейся трещины | 1974 |
|
SU504074A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
