Изобретение относится к радиотехнике, в частности к системам определения координат источников радиоизлучения, и может быть использовано для оценки местоположения подвижных полицейских групп, автомобилей служб экстренной помощи, средств транспортировки ценных документов или грузов, отдельных лиц, а также в системах охранной сигнализации для определения местоположения автомобилей при их краже и лиц, на которых совершенно нападение.
Известен способ определения местоположения и идентификации подвижных объектов, основанный на излучении сигналов передатчиками, снабженными индивидуальными кодами и установленными на объектах, приеме этих сигналов за счет строго ограниченной энергодоступности только ближайшими к объектам приемниками, установленными на известных стационарных пунктах, передаче с приемников на пункт обработки данных о факте приема и коде принятных сигналов, где по координатам приемников, принимающих сигналы передатчиков объектов, определяют местоположение подвижных объектов и производят их идентификацию (Патент Франции N 2630565, кл G 08 B 7/06, 1988). Система, реализующая данный способ, содержит передатчики, установленные на объектах, N приемников, установленных на известных стационарных пунктах в пределах требуемого радиуса действия, пункт обработки и систему передачи информации с приемников на пункт обработки.
Недостатками известных способа и системы являются, во-первых, низкая точность местоопределения координат объектов, соизмеримая с расстоянием между ближайшими приемниками, во-вторых, низкая пропускная способность, в-третьих, ограниченный радиус действия, увеличение которого приводит к резкому увеличению реализационных затрат.
Наиболее близким по технической сущности к предложенному способу является способ определения местоположения и идентификации подвижных объектов, заключающийся в излучении сигналов передатчиками подвижных объектов (ППО), снабженных индивидуальными кодами, приеме и демодуляции сигналов в N пространственно разнесенных приемных пунктах (ПП) с известными координатами, причем N ≥ 3, проведении замеров времени поступления сигналов на каждый ПП путем определения момента времени перехода мгновенной величины принятого сигнала через единый пороговый уровень и его положения относительно общего сигнала временной метки, который получают в каждом ПП путем приема сигнала местной телевещательной станции и выделения синхросигнала обратного хода кадровой развертки, идентификации на каждом ПП подвижных объектов на основе демодуляции принятых сигналов, передаче выявленных индивидуальных кодов объектов и полученных замеров времени поступления сигналов с каждого ПП на центральный пункт (ЦП) с известными координатами, расчете на ЦП взаимных задержек принятых в ПП сигналов, корректировке взаимных задержек на соответствующие поправки, получаемые при калибровке, расчете координат подвижных объектов по скорректированным взаимным задержкам и определении экземпляров объектов по переданным индивидуальным кодам объектов, причем для получения калибровочных поправок из пункта с известными координатами передают сигнал с опознавательным кодом калибровки, принимают его в приемных пунктах, проводят замеры времени поступления сигнала на каждый ПП, который передают на ЦП, где рассчитывают взаимные задержки между сигналами, принятыми в ПП, сравнивают их с известными расчетными величинами и результаты сравнения запоминают в виде поправок (Патент США N 4916455, кл. G 01 S 3/02, 1990).
Известная система определения местоположения и идентификации подвижных объектов, выбранная в качестве прототипа содержит передатчики подвижных объектов, N пространственно разнесенных приемных пунктов с известными координатами, причем N ≥ 3, центральный пункт с известными координатами и реперный передатчик с известными координатами, причем каждый передатчик подвижных объектов включает последовательно соединенные генератор кода объекта, радиопередающий блок и передающую антенну, каждый ПП включает последовательно соединенные приемную антенну, радиоприемный блок и пороговый блок, последовательно соединенные измеритель временных интервалов и первый передающий модуль, последовательно соединенные дополнительную приемную антенну, дополнительный радиоприемный блок и блок выделения обратного хода кадровой развертки, выход которого подключен к одному входу измерителя временных интервалов, к другому входу которого подключен выход порогового блок, а и демодулятор, вход которого подключен к выходу радиоприемного блока, а выход - к входу второго передающего модуля, центральный пункт включает N первых и N вторых приемных модулей, входы которых подключены через телефонные линии связи к выходам соответственно первых и вторых передающих модулей соответствующих ПП, блок расчета координат, блок опознавания кода объекта, устройство индикации, управляющий блок и N блоков коррекции задержек, входы которых подключены к выходам соответствующих первых приемных модулей, а выходы - к соответствующим входам блока расчета координат, выход которого подключен к первому входу управляющего блока, второй вход которого подключен к выходу блока опознавания кода объекта, а первый и второй выходы подключены соответственно к входу блока индикации и к объединенным первым управляющим входом N блоков коррекции задержек, вторые управляющие входы которых подключены к соответствующим входам управляющего блока, причем входы устройства опознавания кода объекта подключены к выходам соответствующих вторых приемных модулей, а реперный передатчик включает последовательно соединенные генератор опознавательного кода калибровки, радиопередающий блок и передающую антенну. Кроме того, необходимым условием работоспособности описанной системы является функционирование местной телевещательной станции.
Недостатками известных способа и системы являются низкие точность местоопределения и пропускная способность, а также сложность технической реализации. Эти недостатки обусловлены следующими обстоятельствами.
Во-первых, принципиальные ограничения в точности местоопределения связаны с тремя основными факторами: невозможностью установки единого порогового уровня для всех N приемных пунктов, наличие временных его дрейфов и наличие ошибок измерения моментов положения временных меток на ПП. Все эти факторы приводят к погрешностям замеров временных интервалов и, следовательно, к ошибкам местоопределения.
Во-вторых, пропускная способность способа и системы при использовании одной частоты для работы ППО ограничена одним объектом.
Применение нескольких частот для слежения за соответствующим числом объектов приводит к практически пропорциональному росту затрат. Кроме того, для осуществления калибровки требуется выключение всех ППО, что также снижает пропускную способность способа и системы.
В-третьих, радиус действия системы, включающей только три ПП в реальных условиях с городской застройкой ограничивается электромагнитной доступностью сигнала ППО, при этом простое наращивание числа ПП приводит к пропорциональному росту реализационных затрат.
Кроме того, сложность реализации системы обусловлена наряду с отмеченными обстоятельствами установки единого порогового уровня и высоких требований к точности оценки моментов положения временных меток также необходимостью оснащения приемных пунктов аппаратурой приема и выделения временных меток, необходимостью задействования телефонных каналов, а при отсутствии круглосуточной работы местной телевещательной станции - необходимостью развертывания специального передатчика сигналов единого времени.
Целью изобретения является повышение точности местоопределения и пропускной способности при относительном снижении реализационных затрат.
Это достигается тем, что при способе определения местоположения и идентификации подвижных объектов, заключающемся в излучении сигналов передатчиками подвижных объектов, снабженных индивидуальными кодами, приеме и демодуляции сигналов в N пространственно разнесенных приемных пунктах с известными координатами, причем N>3, идентификации подвижных объектов на основе демодуляции сигналов и расчете координат подвижных объектов на центральном пункте с известными координатами по взаимным задержкам принятых в ПП сигналов ППО, скорректированным на соответствующие поправки, получаемые при калибровке, периодически осуществляемой путем излучения на частоте ППО из пункта с известными координатами сигнала с опознавательным кодом калибровки, приема его в этих ПП и запоминания в виде поправок результатов сравнения полученных взаимных задержек между сигналами, принятыми в ПП, с известными расчетными величинами, принятые в ПП сигналы ретранслируют с переносом спектра на центральный пункт, где эти сигналы принимают с преобразованием на единую промежуточную частоту и измеряют взаимные задержки между ними, причем ретрансляцию сигналов производят одновременно только тремя ПП в течение установленного промежутка времени, для чего с ЦП на частоте ППО периодически излучают сигнал управления, снабженный индивидуальными кодами ПП, принимают его в ПП, демодулируют и при совпадении переданного кода с индивидуальным кодом ПП осуществляют ретрансляцию сигналов этим ПП, при этом в сигнале управления формируют индивидуальные коды трех близлежащих ПП с последовательным перебором от цикла к циклу кодов всех ПП, кроме того, в установленные промежутки времени в сигнале управления формируют опознавательный код калибровки, причем ППО излучают сигналы периодически с установленной скважностью, идентификацию подвижных объектов и опознавание кода калибровки производят на ЦП по результатам демодуляции сравнения и формирования усредненного кода сигналов, принятых одновременно с трех ПП и, кроме того, расчет координат, идентификацию подвижных объектов и калибровку производят в случае равенства нулю суммы трех измеренных значений взаимных задержек между парами сигналов, принятых с первого и второго, второго и третьего, третьего и первого ПП выбранной группы ПП и совпадения кодов сигналов, ретранслированных этими ПП.
Кроме того, для измерения взаимной задержки между сигналами U1(t) и U2(t) синхронно производят их дискретизацию во времени и квантовании по уровню, преобразуют полученные дискретные временные отсчеты этих сигналов в совокупность дискретных комплексных спектральных компонент  (fn) и
(fn) и  (fn) соответственно и вычисляют взаимную задержку τ12 по правилу
(fn) соответственно и вычисляют взаимную задержку τ12 по правилу
τ12=  arg
arg (fn)
(fn) (fn)
(fn) f
f f
f , (1)
, (1)
где Nf - количество спектральных компонент сигналов;
n= 1, 2, 3, . . . , Nf - номер спектральной компоненты сигналов;
Δf = fn+1-fn - частотное расстояние между соседними спектральными компонентами сигналов;
k= 1, 2, 3, . . . , Nf-1 - масштабный множитель частотного расстояния между спектральными компонентами сигналов;
arg{  } - аргумент комплексной величины
} - аргумент комплексной величины  .
.
Кроме того в систему определения местоположения и идентификации подвижных объектов, содержащую передатчики подвижных объектов, N пространственно разнесенных приемных пунктов с известными координатами, причем N>3, и центральный пункт с известными координатами, причем каждый ППО включает последовательно соединенные генератор кода объекта, радиопередающий блок и передающую антенну, каждый ПП включает последовательно соединенные приемную антенну, радиоприемный блок и демодулятор, а ЦП включает блок расчета координат, блок опознавания кода объекта, блок индикации, управляющий блок и три блока коррекции задержек, выходы которых подключены к соответствующим входам блока расчета координат, выход которого подключен к первому входу управляющего блока, второй вход которой подключен к выходу блока опознавания кода объекта, а первый и второй выходы подключены соответственно к входу блока индикации и к объединенным первым управляющим входам первого, второго и третьего блоков коррекции задержек, вторые управляющие входы которых подключены соответственно к третьему, четвертому и пятому выходам управляющего блока, в каждый ППО введен генератор импульсов, выход которого подключен к управляющему входу радиопередающего блока в каждый ПП введены последовательно соединенные радиопередающий блок и радиопередающая антенна и последовательно соединенные блок опознавания кода ПП и генератор одиночного импульса, выход которого подключен к управляющему воду радиопередающего блока, вход которого подключен к выходу радиоприемного блока, а вход блока опознавания кода ПП подключен к выходу демодулятора, кроме того, в ЦП введены приемная антенна, три радиоприемных блока, объединенные входы которых подключены к выходу приемной антенны, три блока измерения задержки, блок сравнения задержек, три входа которого объединены с входами соответствующих трех блоков коррекции задержек и подключены к выходам соответствующих блоков измерения задержки, а выход подключен к третьему входу управляющего блока, три демодулятора, входы которых подключены к выходам соответствующих радиоприемных блоков, три блока опознавания кода ПП, входы которых подключены к выходам соответствующих демодуляторов, блок сравнения и усреднения кодов, три входа которого подключены к выходам соответствующих демодуляторов, а первый и второй выходы - соответственно к входу блока опознавания кода объекта и четвертому входу управляющего блока, шестой выход которого подключен к объединенным управляющим входам блока расчета координат и блока опознавания кода объекта, и передатчик управления, содержащий генератор кода ПП, генератор кода калибровочного сигнала и последовательно соединенные коммутатор, радиопередающий блок и передающую антенну, причем два входа коммутатора подключены соответственно к выходам генератора кода ПП и генератора кода калибровочного сигнала, а вход генератора кода ПП и управляющие входы коммутатора и радиопередающего блока подключены к седьмому, восьмому и девятому выходам управляющего блока соответственно, пятый, шестой и седьмой входы которой подключены к выходам соответствующих боков опознавания кода приемного пункта, кроме того, объединенные первый вход первого и второго блоков измерения задержки, объединенные второй вход первого и первый вход третьего блоков измерения задержки и объединенные первый вход второго и второй вход третьего блоков измерения задержки подключены к выходам соответствующих радиоприемных блоков.
Кроме того, каждый блок измерения задержки содержит два аналого-цифровых преобразователя, два процессора быстрого преобразования Фурье (БПФ), два умножителя комплексных чисел, элемент задержки комплексных чисел, накапливающий сумматор комплексных чисел, функциональный преобразователь вида arctgyx , два делителя, накапливающий сумматор, датчик дискретных частотных расстояний и постоянное запоминающее устройство, причем выходы аналого-цифровых преобразователей подключены к входам соответствующих процессоров БПФ, пары выходов которых подключены к соответствующим парам входов первого умножителя комплексных чисел, пара выходов которого подключена соответственно к одной паре входов второго умножителя комплексных чисел и к паре входов элемента задержки комплексных чисел, пара выходов которого подключена к другой паре входов второго умножителя комплексных чисел, пара выходов которого подключена к паре входов накапливающего сумматора комплексных чисел, пара выходов которого подключена к паре входов функционального преобразователя вида arctgyx , выход которого подключен к первому входу первого делителя, выход которого подключен к входу накапливающего сумматора, выход которого подключен к первому входу второго делителя, к второму входу которого подключен выход постоянного запоминающего устройства, кроме того, выход датчика дискретных частотных расстояний подключен к объединенным управляющему входу элемента задержки комплексных чисел и второму входу первого делителя, причем входы двух аналого-цифровых преобразователей и выход второго делителя являются соответственно входами и выходом блока измерения задержки. Кроме того, блок сравнения задержек содержит два сумматора и пороговый блок, причем выход первого сумматора подключен к первому входу второго сумматора, выход которого подключен к входу порогового блока и, кроме того, пара входов первого сумматора, второй вход второго сумматора и выход порогового блока являются соответственно тремя входами и выходом блока сравнения задержек.
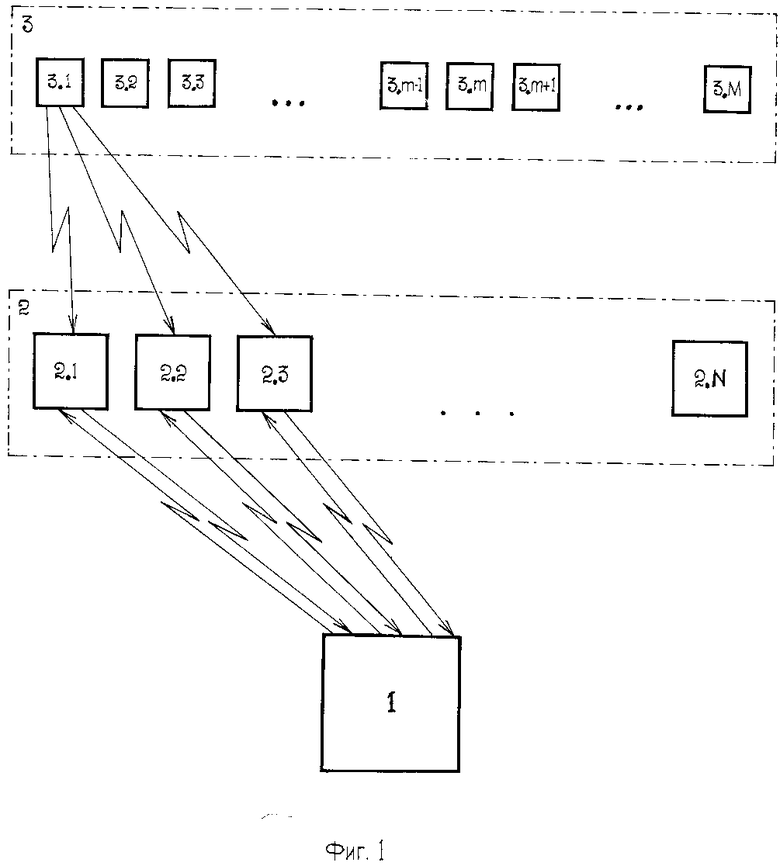
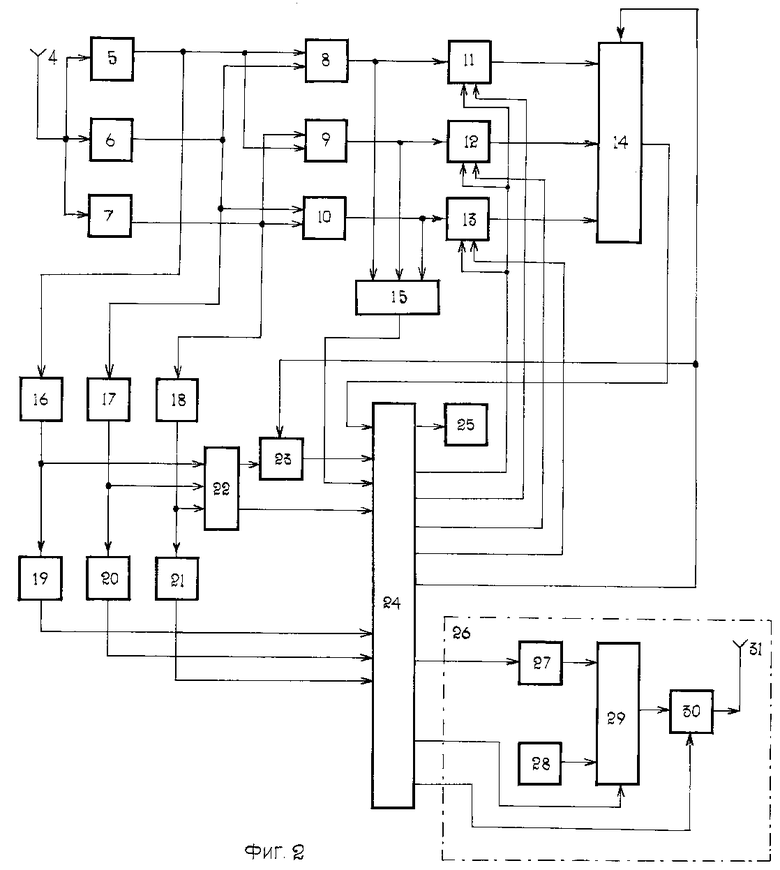
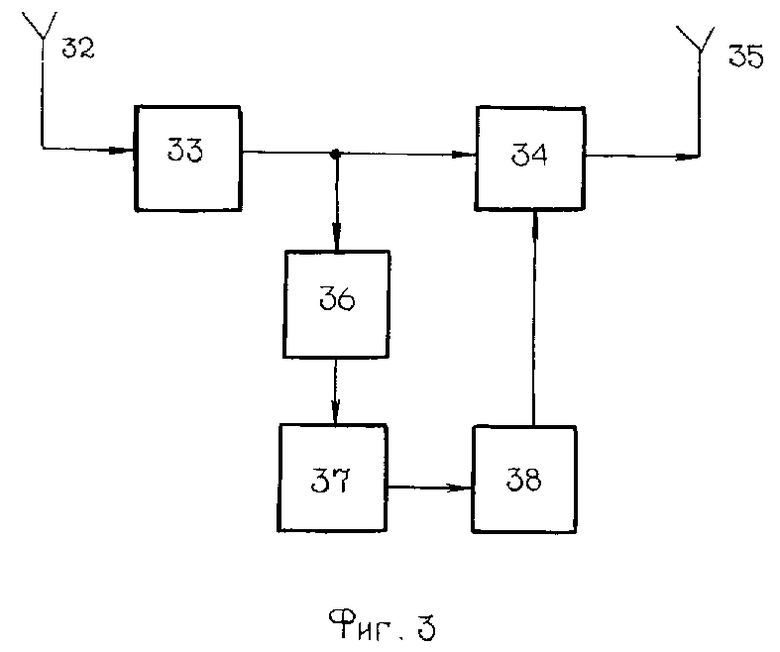
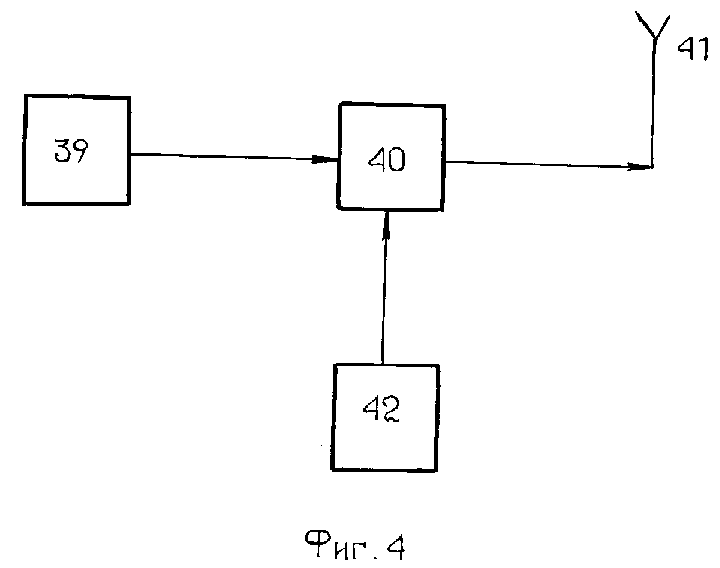
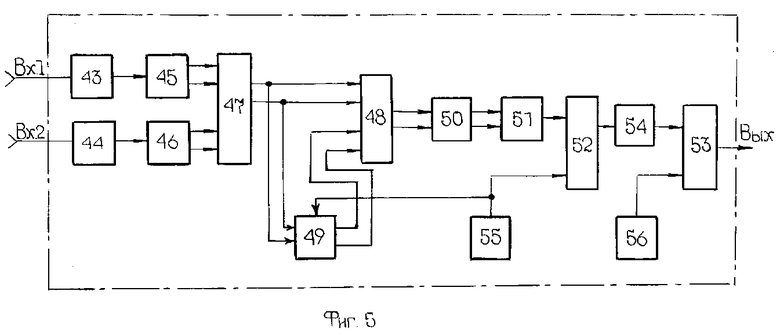
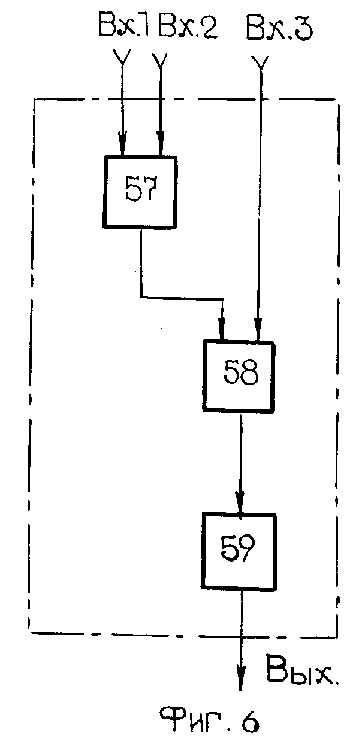
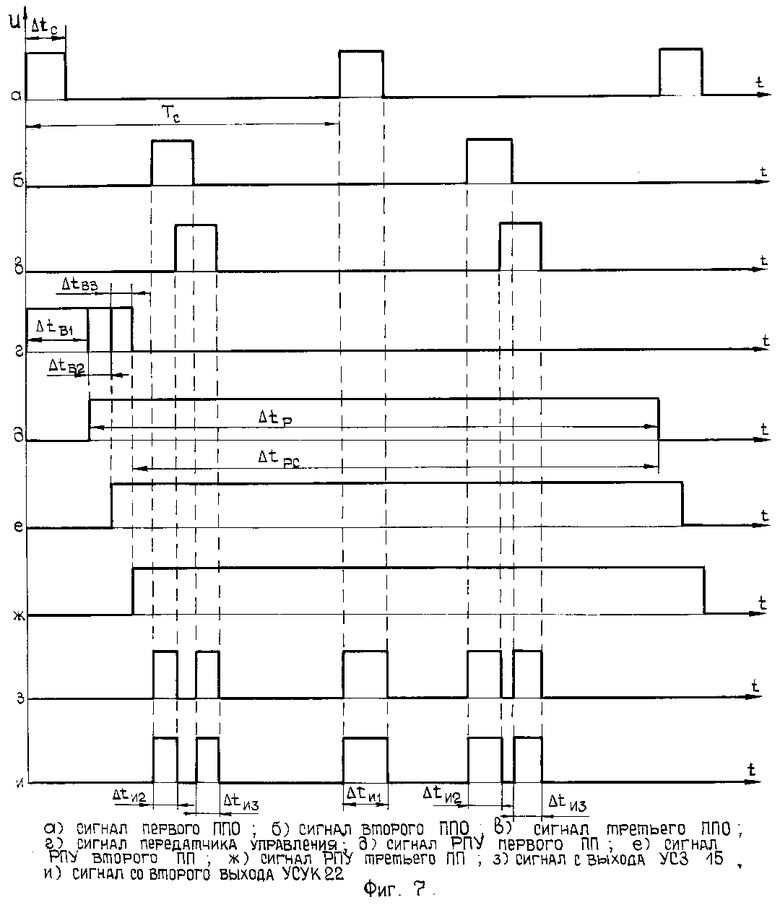
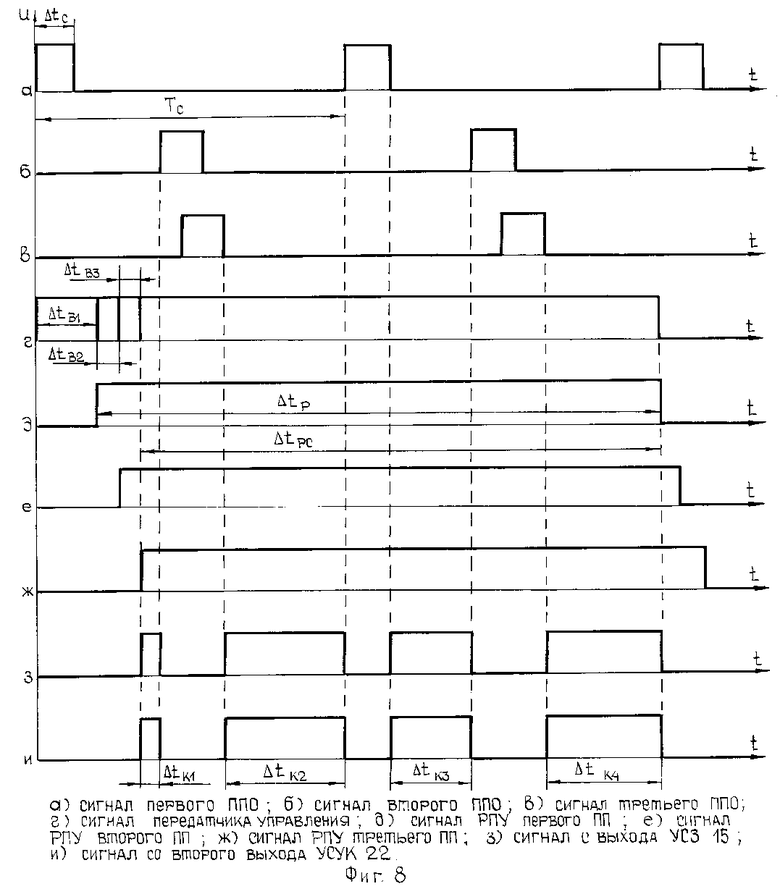
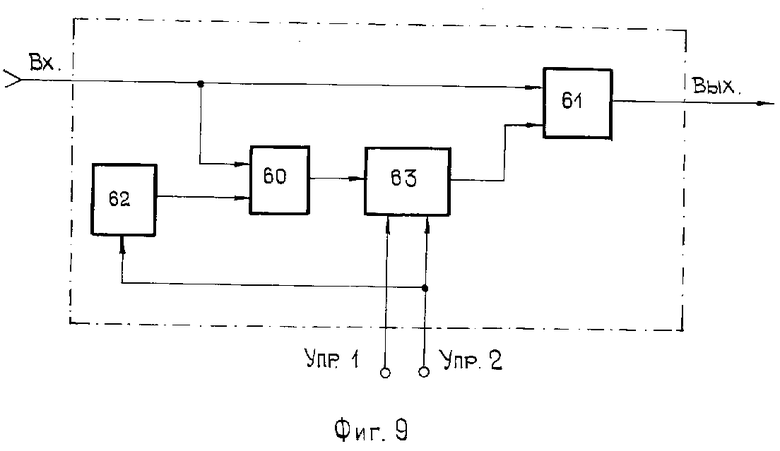
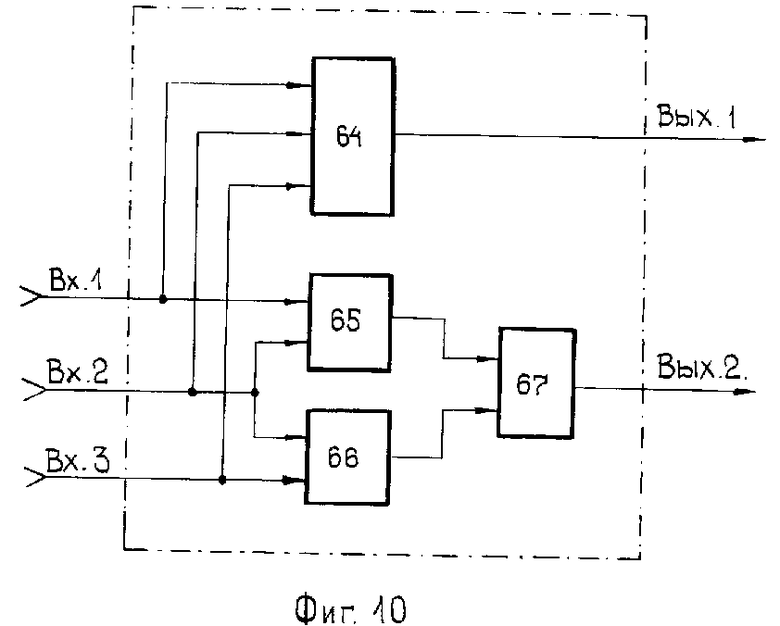
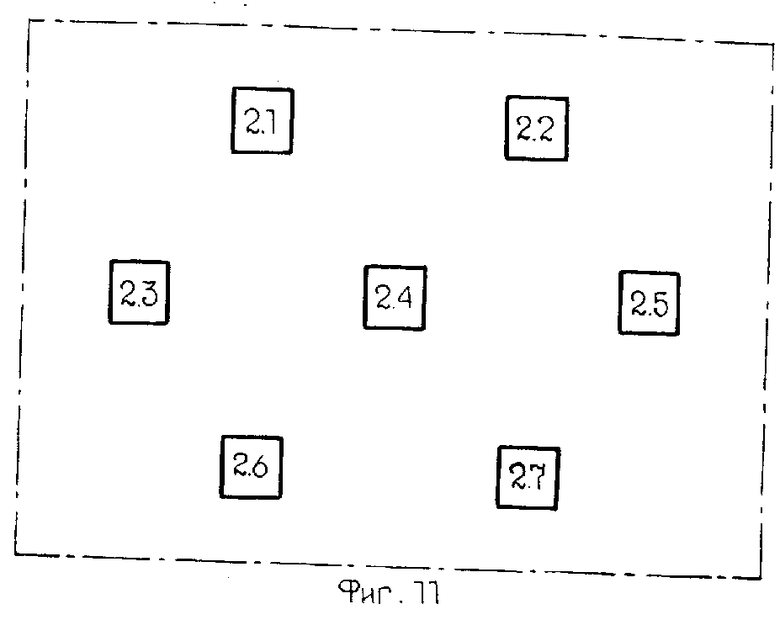
На фиг. 1 приведена структурная схема системы, осуществляющей способ определения местоположения и идентификации подвижных объектов; на фиг. 2 - структурная электрическая схема центрального пункта; на фиг. 3 - структурная электрическая схема приемного пункта; на фиг. 4 - структурная электрическая схема передатчика подвижного объекта; на фиг. 5 - структурная электрическая схема устройства измерения задержки; на фиг. 6 - структурная электрическая схема устройства сравнения задержек; на фиг. 7 - временные диаграммы сигналов, поясняющие работу системы в режиме измерения координат и идентификации подвижных объектов; на фиг. 8 - временные диаграммы сигналов, поясняющие работу системы в режиме калибровки; на фиг. 9 - структурная электрическая схема устройства коррекции задержек; на фиг. 10 - структурная электрическая схема устройства сравнения и усреднения кодов; на фиг. 11 - схема варианта расположения на местности приемных пунктов при N= 7.
В предложенных способе и системе определения местоположения и идентификации подвижных объектов использована совокупность идей, объединенных единым изобретательским замыслом. К ним относятся следующие:
перенос основных операций по обработке сигналов на ЦП за счет ретрансляции этих сигналов на ЦП. Это обеспечивает существенное упрощение приемных пунктов, но при этом для обеспечения необходимой точности измерения моментов времени прихода сигналов способом, используемым в прототипе, требуется уникальная стабильность и точность установки частот трактов приема и ретрансляции (порядка 10-14);
измерение не моментов прихода сигналов, а их взаимной задержки на основе спектральной обработки сигналов. В данном случае может быть допущено общее расхождение частот приеморентрансляционных трактов на уровне разрешающей способности спектрального анализа, а такие требования технически несложно реализуемы. При этом переход на способ измерения, не требующий единой синхронизации системы и установки единого в пространственно рассредоточенных приемных пунктах порогового уровня, обеспечивает наряду с упрощением и повышение точности измерений;
применение режима периодического включения передатчиков подвижных объектов. Это обеспечивает квазиодновременное обслуживание не одного, а совокупности объектов в зоне действия трех приемных пунктов. Однако отсутствие синхронизации процессов включения передатчиков подвижных объектов может приводить к перекрытию периодов из излучения;
применение способов выявления фактов наличия в момент приема сигналов нескольких передатчиков или отсутствия сигналов, основанных на сравнении взаимных задержек и кодов сигналов, принятых одновременно тремя приемными пунктами. Существо идеи заключается в том, что только при излучении сигнала одного передатчика подвижного объекта в определенный интервал времени сигналы, принятые одновременно тремя ПП, будут когерентны, коды их будут совпадать и будет выполняться условие
τ12+τ23+τ31= 0(2) где τji - взаимная задержка между сигналами, принятыми i- и j-м ПП. Условие (2) не выполняется при одновременном излучении двух и более независимых между собой сигналов ППО с соизмеримой мощностью или при отсутствии излучения сигналов ППО (при наличии шумов);
применение принципа последовательного обзора пространства путем перевода в режим ретрансляции соответствующих групп из трех ПП, для чего вводится необходимое управление ПП. Реализация принципа обеспечивает резкое сокращение числа каналов связи;
применение для калибровки приемноретрансляционных трактов передатчика управления, что обеспечивает практически несущественное увеличение реализационных затрат при резком улучшении точностных характеристик системы.
Введение в структурные элементы системы (центральный пункт, приемные пункты, передатчики подвижных объектов) новых блоков, связанных между собой и другими блоками системы указанным образом, обеспечивает правило измерения взаимных задержек сигналов, по которым производится определение координат объектов с более высокими точностью и пропускной способностью при относительном снижении реализационных затрат.
Сопоставительный анализ заявляемого решения с прототипом показывает, что предложенный способ отличается от известного наличием новых действий над сигналами: ретрансляции с переносом спектра принятых в ПП сигналов на ЦП, прием сигналов на ЦП с преобразованием на единую промежуточную частоту, измерение взаимных задержек между принятыми сигналами, осуществление ретрансляции сигналов одновременно только тремя ПП (для чего режимами работы ПП управляют), проведение расчета координат, идентификации объектов и калибровки только в случае равенства нулю суммы взаимных задержек и совпадения кодов сигналов, ретранслированных тремя ПП, использование сигнала управления ПП для калибровки, периодическое излучение сигналов ППО. Сопоставительный анализ с прототипом также показывает, что предложенная система отличается наличием новых блоков (в каждом ППО - генератора импульсов; в каждом ПП - радиопередающих блоков и антенны, блока опознавания кода ПП и генератора импульса; в ЦП - приемной антенны, трех радиоприемных блоков, трех блоков измерения задержки, блока сравнения задержек, трех демодуляторов, трех блоков опознавания кода ПП, блока сравнения и усреднения кодов и передатчика управления), новыми связями между введенными блоками и остальными блоками системы, обеспечивающими реализацию нового способа определения местоположения и идентификации подвижных объектов. В связи с этим предложенные способ и система соответствуют критерию изобретения "новизна".
При изучении других известных технических решений в данной области техники указанная совокупность признаков, отличающая изобретение от прототипа, не была выявлена, что обеспечивает соответствие критерию "существенные отличия".
Передатчики подвижных объектов периодически с установленной скважностью R излучают радиосигналы с центральной частотой fc и шириной спектра Δ F, содержащие их индивидуальные коды, в течение фиксированных интервалов времени Δ tс. За счет естественных различий в периоде следования импульсов генераторов импульсов ППО Тс взаимное положение импульсов в каждом периоде их повторения будет изменяться случайно: от полного несовпадения до частичного или полного перекрытия. При этом, если эти объекты находятся в зоне электромагнитной доступности тройки близлежащих приемных пунктов, то соответственно с взаимным положением импульсов от этих ППО будут изменяться условия их приема и наблюдения. Сигналы ППО принимают не менее чем в трех ПП, в зону действия которых они попадают. Сигналы, принятые тремя близлежащими ПП одновременно подвергаются преобразованию по частоте с сохранением спектра и ретранслируются в течение интервала времени Δ tр на ЦП на закрепленных за каждым ПП одной из трех частот ретрансляции fр1, fр2 и fр3. Сигналы, одновременно ретранслированные с трех ПП принимают на ЦП, где их синхронно преобразуют в сигналы с единой промежуточной частотой fпр. После этого на ЦП измеряют взаимные задержки между парами сигналов, принятых с первого и второго ( τ 12), второго и третьего ( τ 23), третьего и первого ( τ 31) приемных пунктов указанной тройки ПП и одновременно производят демодуляцию принятых с этих ПП сигналов.
Измеренные значения трех взаимных задержек τ12, τ23, τ31 суммируют и полученную сумму сравнивают с пороговым значением Pτ= 3Δτ, где Δτ - погрешность измерения взаимной задержки между парой сигналов, т. е. производят проверку выполнения условия l τ12+τ23+τ31 l ≅Pτ, (3) эквивалентного условию (2) при идеальных измерителях взаимных задержек ( Δτ = 0). Одновременно производят поразрядное сравнение кодов принятых с трех ПП сигналов и формирование усредненного кода сигнала объекта. При выполнении условия (3) и совпадении результатов сравнения кодов сигналов, что свидетельствует о приеме в данный интервал времени сигнала только от одного ППО, во-первых, измеренные значения взаимных задержек τ12, τ23, τ31корректируются на соответствующие поправки, компенсирующие неидентичности приеморетрансляционных трактов данных трех ПП, которые получают при калибровке, далее по скорректированным взаимным задержкам τ12I, τ23I, τ31Iпроизводят расчет координат данного объекта путем использования известных формул, во-вторых, по усредненному коду сигналов от трех ПП производят опознавание индивидуального кода объекта.
Результаты расчета координат и опознавания индивидуального кода объекта регистрируются в блоке индикации ЦП. В другие интервалы времени за время ретрансляции Δ tр аналогично производится расчет координат и идентификация других объектов, сигналы которых также принимаются выбранной группой из трех ПП. При невыполнении условия (3) или несовпадении результатов сравнения кодов сигналов, что свидетельствует о приеме в данный интервал времени сигналов от двух и более ППО или об отсутствии приема сигнала хотя бы в одном из трех ПП, расчет координат и идентификация объекта не производятся. Выбор интервала ретрансляции Δ tр из условия
Tc<Δtp<2Tc(4) позволяет получить контакт выбранных трех ПП со всеми ППО, находящимися в зоне их энергодоступности, а количество одновременно излучающих ППО, определение координат, идентификацию которых можно произвести с использованием выбранной тройки ПП, примерно равно скважности k излучения радиосигналов ППО.
Далее последовательно во времени сигналы, принятые другими группами из трех близлежащих ПП (количество групп равно количеству комбинаций из трех близлежащих приемных пунктов, возможных для N приемных пунктов), аналогично ретранслируются на ЦП с последующим определением координат и идентификации объектов, находящихся в зоне действия соответствующих групп ПП. Для осуществления одновременной ретрансляции сигналов группой из трех близлежащих ПП с последующим перебором всех групп близлежащих ПП режимами ретрансляции ПП управляют, что чего с ЦП на частоте ППО fсизлучается сигнал управления, содержащий в течение трех последовательных интервалов времени Δ tВ1, ΔtВ2, Δ tВ3 индивидуальные коды первого, второго и третьего ПП выбранной тройки ПП. Сигнал управления принимают в каждом ПП, демодулируют и при совпадении переданного кода первого ПП с индивидуальным кодом ПП осуществляют ретрансляцию сигналов этим ПП в течение интервала времени Δ tр, принимают ретранслированный сигнал управления на ЦП, демодулируют, опознают индивидуальный код первого ПП и далее излучают, повторяя аналогичные действия, сигнал управления с кодами второго и третьего ППП выбранной тройки ПП. Необходимо отметить, чо при управлении ПП сигналом на частоте ППО могут возникать ситуации, при которых ПП одновременно принимает и сигнал управления, и сигналы ППО. В этом случае сигнал управления содержит индивидуальный код данного ПП до тех пор, пока индивидуальный код ПП в данном ПП не будет опознан, и режим ретрансляции ПП включен. Поэтому длительность интервалов времени Δ tв1, Δtв2, Δ tв3 в общем может быть различна. После включения последнего ПП из выбранной тройки ПП в течение интервала времени Δtрследует пауза, во время которой сигнал управления не излучается. Далее аналогично излучается сигнал управления, содержащий индивидуальные коды других групп из трех близлежащих ПП с последовательным перебором от цикла к циклу кодов всех приемных пунктов.
Для определения поправок, учитывающих неидентичности приеморетрансляционных трактов и служащих для устранения систематических ошибок измерения координат объектов, периодически во времени производят калибровку, конечным результатом которой является запоминание поправок для дальнейшего использования их при корректировке измеренных взаимных задержек. В режиме калибровки в качестве сигнала с известными координатами используется сигнал управления, излучаемый с ЦП с известными координатами. При этом после включения последнего ПП из выбранной тройки близлежащих ПП в течение интервала времени Δ tрсизлучается сигнал управления с опознавательным кодом калибровки, аналогичный по структуре сигналу ППО (один из возможных объектов). Данный калибровочный сигнал с центральной частотой fс и шириной спектра ΔF принимают выбранными тремя ПП и ретранслируют на соответствующих частотах fр1, fр2, fр3 на ЦП, где дальнейшие действия над принятыми с ПП сигналами совпадают с действиями при измерении координат и идентификации объектов. При выполнении условия (3) и совпадении результатов сравнения кодов сигналов, что свидетельствует о приеме в данный интервал времени выбранными тремя ПП только сигнала управления с опознавательным кодом калибровки, измеренные значения взаимных задержек τ12, τ23, τ31сравнивают с известными расчетными величинами τ12p, τ23p, τ31pсоответственно. Результаты сравнения запоминают в виде поправок, соответствующих группе из выбранных трех ПП. Аналогично осуществляется определение поправок, соответствующих другим группам ПП, переводимым в режим ретрансляции по сигналу управления с ЦП.
Для измерения взаимной задержки между сигналами при предложенном способе использована известная взаимосвязь величины изменения разности фаз Δϕ между парой сигналов, имеющих различие в частотах на величину частотного расстояния Δ f, от времени задержки сигналов τ , описываемая выражениями
Δϕ= 2πΔfτ (5)
или
τ = 
 (6) При этом, согласно предложенному способу, для измерения взаимной задержки τ12 между сигналами U1(t) и U2(t), имеющими ширину спектра Δ F, синхронно производят их дискретизацию во времени и квантование по уровню, преобразуют полученные дискретные временные отсчеты этих сигналов в совокупность дискретных комплексных спектральных компонент
(6) При этом, согласно предложенному способу, для измерения взаимной задержки τ12 между сигналами U1(t) и U2(t), имеющими ширину спектра Δ F, синхронно производят их дискретизацию во времени и квантование по уровню, преобразуют полученные дискретные временные отсчеты этих сигналов в совокупность дискретных комплексных спектральных компонент  (fn) и
(fn) и  (fn) соответственно, причем n= 1, 2, 3, . . . , Nf - номер спектральных компонент, а Nf - их количество в сигнале с шириной спектра Δ F. При этом преобразованные сигналы можно представить в виде
(fn) соответственно, причем n= 1, 2, 3, . . . , Nf - номер спектральных компонент, а Nf - их количество в сигнале с шириной спектра Δ F. При этом преобразованные сигналы можно представить в виде (t1) =
(t1) =  A1ne
A1ne ; (7)
; (7) (t2) =
(t2) =  A2ne
A2ne , (8) где t1 и t2 - времена распространения сигналов, взаимную задержку которых требуется измерить;
, (8) где t1 и t2 - времена распространения сигналов, взаимную задержку которых требуется измерить;
A1n и A2n - модули спектральных компонент сигналов;
fn и ϕn - частота и начальная фаза спектральных компонент сигналов.
Используя выражения (7) и (8), можно записать следующее равенство: (fn)
(fn) (fn)
(fn) (fn+k)
(fn+k) (fn+k) = A1nA2nA1(n+k)A2(n+k)e
(fn+k) = A1nA2nA1(n+k)A2(n+k)e , (9) где τ12 = t1-t2 - взаимная задержка сигналов;
, (9) где τ12 = t1-t2 - взаимная задержка сигналов;
K Δ f= fn+k-fn= k(fn+1-fn) - частотное расстояние между (n+k)-й и n-й спектральными компонентами сигналов (частотные расстояния между любыми соседними спектральными компонентами равны между собой). Поэтому, учитывая равенство (9), предложена совокупность дальнейших действий над спектральными компонентами сигналов  (fn) и
(fn) и  (fn), сводящаяся к вычислению взаимной задержки τ12 по правилу (1).
(fn), сводящаяся к вычислению взаимной задержки τ12 по правилу (1).
Система определения местоположения и идентификации подвижных объектов содержит центральный пункт 1, N приемных пунктов 2. i (i= 1, 2, . . . , N), причем N>3, и требуемое количество М передатчиков подвижных объектов 3. m (m= 1, 2, 3, . . . , M). Центральный пункт 1 содержит приемную антенну (ПрА)4, первый, второй и третий радиоприемные блоки (РПр6) 5, 6 и 7, первый, второй и третий блоки измерения задержки (БИЗ) 8, 9 и 10, первый, второй и третий блоки коррекции задержек (БКЗ) 11, 12 и 13, блок расчета координат (БРК) 14, блок сравнения задержек (БСЗ) 15, первый, второй и третий демодуляторы (ДМ) 16, 17 и 18, первый, второй и третий блоки опознавания кода приемного пункта (БОКПП) 19, 20 и 21, блок сравнения и усреднения кодов (БСУК) 22, блок опознавания кода объекта (БОКО) 23, управляющий блок 24, блок индикации (БИ) 25 и передатчик управления (ПУ) 26, включающий генератор кодов приемных пунктов (ГКПП) 27, генератор кода калибровочного сигнала (ГККС) 28, коммутатор 29, радиоперадающий блок (РПБ) 30 и передающую антенну (ПА) 31.
Каждый приемный пункт 2. i содержит приемную антенну 32, радиоприемный блок 33, радиопередающий блок 34, передающую антенну 35, демодулятор 36, блок опознавания кода приемного пункта 37 и генератор одиночного импульса (ГОИ) 33.
Каждый передатчик подвижного объекта 3. m содержит генератор кода объекта (ГКО) 39, радиопередающий блок 40, передающую антенну 41 и генератор импульсов (ГИ) 42.
Кроме того, каждый блок измерения задержки 8, 9 и 10 содержит первый и второй аналого-цифровые преобразователи (АЦП) 43 и 44, первый и второй процессоры быстрого преобразования Фурье (БПФ) 45 и 46, первый и второй умножители комплексных чисел (УКЧ) 47 и 48, элемент задержки комплексных чисел (ЭЗКЧ) 49, накапливающий сумматор комплексных чисел (НСКЧ) 50, функциональный преобразователь вида arctgyx (ФП) 51, первый и второй делители 52 и 53, накапливающий сумматор (НС) 54, датчик дискретных частотных расстояний (ДДЧР) 55 и постоянное запоминающее устройство (ПЗУ) 56.
Кроме того, устройство сравнения задержек 15 содержит первый и второй сумматоры 57 и 58 и пороговый блок 59.
Система, реализующая способ определения местоположения и идентификации подвижных объектов, работает следующим образом.
Передатчики подвижных объектов 3. m периодически с периодом Тс с установленной скважностью k излучают радиосигналы с центральной частотой fси шириной спектра Δ F, содержащие их индивидуальные коды, в течение фиксированных интервалов времени Δ tc (см. фиг. 7 а, б, в и 8 а, б, в), для чего в каждом ППО 3. m сигнал с ГКО 39, содержащий индивидуальный код объекта, поступает на РПБ 40, включение которого управляется ГИ 42, формирующим с периодом Тс импульсы длительностью Δ tc, и далее сигнал с центральной частотой fc в установленные интервалы времени Δ tcпоступает на ПА 41 и излучается. Радиосигналы, излучаемые каждым ППО 3. m принимают не менее чем в трех пространственно разнесенных ПП, ближайших к соответствующим ППО 3. m.
В режиме измерения координат и идентификации подвижных объектов по командам с ЦП 1 одновременно осуществляют ретрансляцию сигналов группам из трех близлежащих ПП при последовательном во времени переборе всех комбинаций возможных из N пространственно разнесенных приемных пунктов, образующих группы из трех близлежащих ПП. Для осуществления ретрансляции сигналов группой из трех близлежащих ПП с седьмого, восьмого и девятого выходов управляющего блока 24 на вход ГКПП 27, управляющие входы коммутатора 29 и РПБ 30 соответственно поступают сигнал, содержащий номер первого ПП выбранной группы, сигнал логической единицы и сигнал включения передатчика. По этим сигналам ГКПП 27 формирует код первого ПП выбранной группы, который поступает на первый вход коммутатора 29 и далее - на вход РПБ 30, формирующего сигнал управления на частоте fс, содержащий код первого ПП. Данный сигнал управления с выхода РПБ 30 поступает на вход ПА 31 и излучается. Сигнал управления принимают на частоте fc в каждом ПП системы, причем сигнал, принятый ПрА 32, поступает на вход РПрБ 33, где усиливается и преобразуется в сигнал с промежуточной частотой fпр. с сохранением первоначального спектра. Далее сигнал с выхода РПрБ 33 поступает одновременно на входы РПБ 34 и демодулятора 36. В демодуляторе 36 производят демодуляцию сигнала, после чего демодулированный сигнал с выхода ДМ 36 поступает на вход БОКПП 37, в котором производят сравнение переданного кода первого ПП выбранной группы ПП с индивидуальным кодом ПП. При совпадении кодов с выхода БОКПП 37 первого ПП выбранной группы ПП на вход ГОИ 38 поступает сигнал совпадения, при приеме которого ГОИ 38 формирует одиночный импульс длительностью Δ tр, поступающий на управляющий вход РПБ 34 и включающий его на интервал времени Δ tр (см. фиг. 7, д). В течение этого интервала времени сигнал, поступающий на вход РПБ 34 на промежуточной частоте fпр, преобразуется в сигнал с центральной частотой ретрансляции fр1, закрепленной за данным ПП, и сохраняющий первоначальный спектр сигналов. Данный сигнал с выхода РПБ 34 поступает на вход ПА 35 и излучается в течение интервала времениΔ tр. Ретранслированный включенным первым ПП из выбранной группы ПП сигнал управления, содержащий индивидуальный код этого ПП, принимается ПрА 4 ЦП 1, с выхода которой поступает на вход первого РПрБ 5, настроенного на центральную частоту fp1, где усиливается, преобразуется с сохранением первоначального спектра в сигнал на промежуточной частоте fпр. С выхода РПрБ 5 сигнал поступает на вход первого демодулятора 16, где он демодулируется, и далее с выхода ДМ 16 поступает на вход первого БОКПП 19, где производится сравнение полученного кода с индивидуальными кодами ПП, имеющих закрепленные частоты ретрансляции fр1. При совпадении принятого кода с кодом соответствующего ПП на выходе УОКПП 19 появляется сигнал совпадения, который поступает на пятый вход управляющего блока 24. При поступлении на пятый вход управляющего блока 24 сигнала совпадения с его седьмого выхода на вход ГКПП 27 поступает сигнал, содержащий номер второго ПП выбранной тройки ПП (необходимо отметить, что сигнал управления, формируемый на ЦП 1, содержит индивидуальный код первого ПП выбранной группы в течение интервала времени Δ tв1 (см. фиг. 7, г). Далее производятся аналогичные действия с сигналом управления, содержащим индивидуальный код второго ПП, за исключением следующих действий. При совпадении кодов с выхода БОКПП 37 второго ПП выбранной группы ПП его РПБ 34 формирует сигнал на частоте fр2, закрепленной за данными ПП (см. фиг. 7, е). Ретранслированный включенным вторым ПП сигнал управления, содержащий индивидуальный код этого ПП, принимается ПрА 4, с выхода которой поступает на вход второго РПрБ 6, настроенного на центральную частоту fр2, где усиливается, преобразуется с сохранением первоначального спектра в сигнал на промежуточной частоте fпр. С выхода РПрБ 6 сигнал поступает на вход второго демодулятора 17, где он демодулируется, и далее с выхода ДМ 17 поступает на вход второго БОКПП 20, где производят сравнение полученного кода с индивидуальными кодами ПП, имеющих закрепленные частоты ретрансляции fр2. При совпадении принятого кода с кодом соответствующего ПП на выходе БОКПП 20 появляется сигнал совпадения, который поступает на шестой вход управляющего блока 24. При поступлении на шестой вход управляющего блока 24 сигнала совпадения с его седьмого выхода на вход ГКПП 27 поступает сигнал, содержащий номер третьего ПП выбранной тройки ПП (необходимо отметить, что сигнал управления, формируемый на ЦП 1, содержит индивидуальный код второго ПП выбранной группы ПП в течение интервала времени tв2, что отражено на фиг. 7, г).
Далее производятся аналогичные действия с сигналом управления, содержащим индивидуальный код третьего ПП, за исключением следующих действий. При совпадении кодов с выхода БОКПП 37 третьего ПП выбранной группы ПП его РПБ 34 формирует сигнал на частоте fр3, закрепленной за данными ПП (см. фиг. 7, ж). Ретранслированный включенным третьим ПП сигнал управления, содержащий индивидуальный код этого ПП, принимается ПрА 4, с выхода которой поступает на вход третьего РПрБ 7, настроенного на центральную частоту fр3, где усиливается, преобразуется с сохранением первоначального спектра в сигнал на промежуточной частоте fпр. С выхода РПрБ 7 сигнал поступает на вход третьего демодулятора 18, где он демодулируется и далее с выхода ДМ 18 поступает на вход третьего БОКПП 21, где производят сравнение полученного кода с индивидуальными кодами ПП, имеющих закрепленные частоты ретрансляции fр3. При совпадении принятого кода с кодом соответствующего ПП на выходе БОКПП 21 появляется сигнал совпадения, который поступает на седьмой вход управляющего блока 24. При поступлении на седьмой вход управляющего блока 24 сигнал совпадения с его девятого выхода на управляющий уход РПБ 30 поступает сигнал выключения передатчика, в результате чего сигнал управления с ПУ 26 не излучается (необходимо отметить, что сигнал управления, формируемый на ЦП 1, содержит индивидуальный код третьего ПП выбранной группы ПП в течение интервала времени Δtв3, что отражено на фиг. 7, г).
После включения режима ретрансляции последнего ПП из выбранной тройки ПП эти ПП в течение интервала времени Δ tрс, определяемого выражением
Δtpc= Δtp-2(ΔtB2+ΔtB3), (10) производят одновременную ретрансляцию сигналов ППО, находящихся в зон действия этой группы ПП (см. фиг. 7). При этом сигналы ППО на частоте fспринимают одновременно этой группой ПП, причем в каждом ПП принятые ПрА 32 сигналы ППО поступают на вход РпрБ 33, где усиливаются и преобразуются в сигналы с промежуточной частотой fпр с сохранением принятого спектра. Далее сигналы в каждом из трех ПП с выхода РПрБ 33 поступают на вход РПБ 34, где преобразуются в сигналы с соответствующей ПП частотой ретрансляции fр1, fр2, fр3, которые поступают на ПА 34 и излучаются. В режиме измерения координат и идентификации подвижных объектов после включения режима ретрансляции первого, второго и третьего ПП выбранной группы ПП с второго выхода управляющего блока 24 на первые управляющие входы БКЗ 11, 12 и 13 поступает сигнал считывания, а с третьего, четвертого и пятого выходов управляющего блока 24 на вторые управляющие входы БКЗ 11, 12 и 13 поступают сигналы, содержащие пары номеров ПП, являющихся соответственно первым и вторым, третьим и первым, вторым и третьим ПП в выбранной группе ПП, осуществляющих ретрансляцию. Сигналы ППО, синхронно ретранслированные тремя выбранными ПП, принимают ПрА 4 ЦП 1, с выхода которой одновременно поступают на входы РПрБ 5, РПрБ 6 и РПрБ 7, настроенных на соответствующие частоты fр1, fр2, fр3, при этом сигналы, ретранслированные первым, вторым и третьим ПП выбранной группы ПП одновременно усиливаются и преобразуются в сигналы с единой промежуточной частотой fпр в РПрБ 5, РПрБ 6 и РПрБ 7 соответственно. Сигналы с выходов РПрБ5, РПрБ 6 и РПрБ7 поступают на входы соответственно ДМ16, ДМ17 и ДМ18, где производится их демодуляция и, кроме того, пары сигналов с выходов РПрБ 5 и РПрБ 6, РПрБ 7 и РпрБ 5, РПрБ 6 и РПрБ 7 поступают соответственно на пары входов первого БИ38, второго БИЗ 9, и третьего БИЗ 10, где производят измерение взаимных задержек τ12, τ31иτ23 между парами сигналов, ретранслированных соответственно первым и вторым, третьим и первым, вторым и третьим ПП выбранной группы ПП. Измеренные значения взаимных задержек τ12, τ31, τ23с выходов БИЗ 8, БИЗ 9 и БИЗ 10 поступают на соответствующие входы БСЗ 15, где производят суммирование этих взаимных задержек и сравнение полученной суммы с пороговым значением Pτ , и входы соответственно БКЗ 11, БКЗ 12 и БКЗ 13, где производят их корректировку на соответствующие поправки Δτ12, Δτ31, Δτ23, компенсирующие инструментальные погрешности измерения взаимных задержек, обусловленные неидентичностью приеморетрансляционных трактов между первым и вторым, третьим и первым, вторым и третьим ПП выбранной группы ПП. Скорректированные взаимные задержки τ12I, τ31I, τ23I с выходов БКЗ 11, БКЗ 12 и БКЗ 13 поступают на соответствующие входы БРК 14. Кроме того, коды демодулированных сигналов с выходов ДМ 16, ДМ 17 и ДМ 18 поступают на соответствующие входы БСУК 22, где производят сравнение и усреднение кодов, причем усредненный код сигналов с первого выхода БСУК 22 поступает на вод БОКО 23. Если полученная в БСЗ 15 сумма взаимных задержек τ12, τ31иτ23 не превышает пороговое значение Pτ , что свидетельствует о приеме в данный интервал времени сигнала только от одного ППО, то на выходе БСЗ 15 появляется сигнал логической единицы, в противном случае - сигнал логического нуля (см. фиг. 7, з). Кроме того, если коды сигналов, поступающих на БСУК 22, совпадают, что также дополнительно подтверждает факт приема в данный интервал времени сигнала только от одного ППО, то на втором выходе БСУК 22 появляется сигнал логической единицы, в противном случае - сигнал логического нуля (см. фиг. 7, и). Сигналы с выхода БСЗ 15 и второго выхода БСУК 22 поступают соответственно на третий и четвертый входы управляющего блока 24. При поступлении на третий и четвертый входы управляющего блока 24 сигналов логических единиц на ее шестом выходе формируется сигнал логической единицы, а при поступлении хотя бы на один из этих входов сигналов логического нуля на ее шестом выходе формируется сигнал логического нуля. Сигнал с шестого выхода управляющего блока 24 поступает на управляющие входы БРК 14 и БОКО 23. При поступлении на управляющий вход БРК 14 сигнала логической единицы в нем производится расчет координат объекта на основе использования известных формул /3/ по скорректированным взаимным задержкам τ12I, τ31I, иτ23I сигналов, полученным в данный интервал времени Δ tи (см. фиг. 7), в противном случае расчет координат не производится. Вычисленные значения координат объекта с выхода БРК 14 поступают на первый вход управляющего блока 24. При поступлении на управляющий вход БОКО 23 сигнала логической единицы в нем производится опознавание кода объекта на основе поразрядного сравнения поступившего на его вход в данный интервал времени Δ tи кода с кодами всех ППО системы. При совпадении поступившего кода с кодом одного из ППО на выходе БОКО 23 появляется сигнал, содержащий номер этого ППО системы, который поступает на второй вход управляющего блока 24, где по номеру данного ППО системы из памяти управляющего блока 24 извлекается подробная информация об объекте, заложенная в банк данных (например, фамилия владельца ППО, марка, цвет, регистрационный номер автомобиля, на котором установлен ППО и т. д. ). При поступлении сигналов на первый и второй входы управляющего блока 24 на его первом выходе формируется сигнал, содержащий информацию о координатах и результатах идентификации данного объекта, который поступает на вход БИ 25, где производится отображение принятой информации. Таким образом, в течение интервала времени Δ tрс (см. фиг. 7 и формулу (10)) производятся определение местоположения и идентификация объектов, передатчики которых излучают радиосигналы и которые находятся в зоне действия трех ПП выбранной группы ближайших между собой ПП. На фиг. 7 в качестве примера указаны интервалы времени Δ tи1, Δ tи2, Δ tи3, в течение которых производится определение местоположения и идентификация соответственно первого, второго и третьего объектов, находящихся в зоне действия выбранных трех ПП.
Аналогично производится включение режима ретрансляции других групп из трех близлежащих ПП при последовательном во времени переборе всех комбинаций, возможных из N пространственно разнесенных приемных пунктов, и определение местоположения и идентификация объектов, находящихся в зоне действия соответствующих групп ПП. Таким образом, интервал времени перебора всех комбинаций из трех близлежащих ПП (циклов) ΔtΣпроизводится местоопределение и идентификация всех ППО системы, излучающих радиосигналы в данный интервал времени ΔtΣ . Причем интервал времени ΔtΣ связан с временными параметрами одного цикла по формуле
ΔtΣ= S(Δtp+ΔtB1+ΔtB2+ΔtB3), (11) где S - количество комбинаций из трех близлежащих ПП, возможных из N пространственно разнесенных приемных пунктов системы.
Периодически во времени производится калибровка системы, конечным результатом которой является получение и запоминание поправок, учитывающих неидентичности приеморетрансляционных трактов ПП и используемых в дальнейшем в режиме определения координат объектов.
В режиме калибровки аналогично режиму измерения координат и идентификации подвижных объектов по командам с ЦП одновременно осуществляют ретрансляцию сигналов группой из трех близлежащих ПП при последовательном во времени переборе всех комбинаций, возможных из N пространственно разнесенных приемных пунктов. Отличие режима калибровки от режима измерения заключается в следующем. После включения режима ретрансляции третьего (последнего) ПП выбранной группы из трех ПП, т. е. после поступления на седьмой вход управляющего блока 24 сигнала совпадения с ее восьмого выхода на управляющий вход коммутатора 29 поступает сигнал логического нуля, соединяющий его второй вход с выходом, а с ее девятого выхода на управляющий вход РПБ 30 продолжает поступать сигнал включения в течение интервала времени Δ tрс с момента поступления сигнала логического нуля на управляющий вход коммутатора 29. Код калибровочного сигнала с выхода ГККС 28 поступает на второй вход коммутатора 29 и далее с его выхода - на выход РПБ 30, формирующего сигнал с опознавательным кодом калибровки на частоте fс с шириной спектра Δ F, по структуре аналогичный сигналу ППО, но со скважностью k, равной единице (т. е. непрерывный сигнал). Калибровочный сигнал с выхода РПБ 30 поступает на вход ПА 31 в течение интервала времени Δtрс и излучается (см. фиг. 8). Кроме того, в режиме калибровки, так же как и в режиме измерения после включения режима ретрансляции трех ПП выбранной группы с третьего, четвертого и пятого выходов управляющего блока 24 на вторые управляющие входы БК3 11, БКЗ 12 и БКЗ 13 поступают сигналы, содержащие пары номеров ПП, являющихся соответственно первым и вторым, третьим и первым, вторым и третьим ПП в выбранной группе ПП. Калибровочный сигнал принимается всеми N приемными пунктами системы как один из сигналов ППО. Дальнейшие действия над калибровочным сигналом полностью совпадает с аналогичными действиями над сигналами в системе при режиме измерения до момента поступления сигналов с выходов БС3 15 и БСУК 22 соответственно на третий и четвертый входы управляющего блока 24. При поступлении на третий и четвертый входы управляющего блока 24 сигналов логических единиц, что соответствует приему в данный интервал времени Δ tк только одного калибровочного сигнала (см. фиг. 8), на ее втором выходе формируется сигнал "Запись", который поступает на объединенные управляющие входы БКЗ 11, БКЗ 12 и БКЗ 13. Поэтому сигналу в БКЗ 11, БКЗ 12 и БКЗ 13, во-первых, производится определение поправок Δτ12, Δτ31иΔτ23 соответственно на основе сравнения измеренных взаимных задержек τ12, τ31, τ23 с расчетными τ12p, τ31p, τ23p, и во-вторых, производится запоминание этих поправок, соответствующих выбранной группе из трех ПП. В течение интервала времени ретрансляции сигналов одной группой ПП Δ tрс интервалов времени Δ tki, в течение которых производится калибровка, может быть несколько (см. фиг. 8). Их число и продолжительность зависят от числа одновременно работающих в интервале времени Δ tpcППО, находящихся в зоне действия выбранных трех ПП. Аналогично производится калибровка всех других групп системы. Общее время калибровки системы ΔtΣтакже определяется формулой (11).
Каждый блок измерения задержки 8, 9 и 10 работает следующим образом.
Пара сигналов U1(t) и U2(t), имеющих ширину спектра Δ F, одновременно поступают соответственно на первый и второй входы (вх. 1 и Вх. 2) БИЗ (см. фиг. 5), которые являются входами АЦП 43 и АЦП 44, где синхронно производят их дискретизацию во времени и квантование по уровню. Дискретные временные отсчеты сигналов с выходов АЦП 43 и АЦП 44 поступают на входы процессоров БПФ 45 и 46 соответственно, где эти отсчеты сигналов преобразуют в совокупность дискретных комплексных спектральных компонент этих же сигналов  (fn) и
(fn) и  (fn) соответственно, причем n= 1, 2, 3, . . . , Nf. Последовательно во времени действительные (мнимые) части каждой спектральной компоненты сигналов
(fn) соответственно, причем n= 1, 2, 3, . . . , Nf. Последовательно во времени действительные (мнимые) части каждой спектральной компоненты сигналов  (fn) и
(fn) и  (fn) с первых (вторых) выходов процессоров БПФ 45 и 46 синхронно поступают на первые (вторые) входы соответственно первой и второй пары входов УКЧ 47, где последовательно во времени производят вычисление составляющих взаимного спектра
(fn) с первых (вторых) выходов процессоров БПФ 45 и 46 синхронно поступают на первые (вторые) входы соответственно первой и второй пары входов УКЧ 47, где последовательно во времени производят вычисление составляющих взаимного спектра  (fn) по правилу
(fn) по правилу (fn)=
(fn)=  (fn)
(fn) (fn). (12)
(fn). (12)
Далее последовательно во времени действительные (мнимые) части каждой составляющей взаимного спектра  (fn) с первого (второго) выходов УКЧ 47 поступают на первый (второй) вход первой пары входов УКЧ 48 и первый (второй) вход ЭЗКЧ 49. Одновременно сигнал с выхода ДДЧР 55, соответствующий первому частотному расстоянию между спектральными компонентами k Δ f (т. е. для k= 1), поступает на объединенные управляющий вход ЭЗКЧ 49 и второй вход первого делителя 52. ЭЗКЧ 49 производит задержку действительных и мнимых частей каждых поступающих на его входы спектральных компонент взаимного спектра на время Тз, определяемое по формуле
(fn) с первого (второго) выходов УКЧ 47 поступают на первый (второй) вход первой пары входов УКЧ 48 и первый (второй) вход ЭЗКЧ 49. Одновременно сигнал с выхода ДДЧР 55, соответствующий первому частотному расстоянию между спектральными компонентами k Δ f (т. е. для k= 1), поступает на объединенные управляющий вход ЭЗКЧ 49 и второй вход первого делителя 52. ЭЗКЧ 49 производит задержку действительных и мнимых частей каждых поступающих на его входы спектральных компонент взаимного спектра на время Тз, определяемое по формуле
Тз= kTo, (13) где То - интервал следования спектральных компонент взаимного спектра  (fn).
(fn).
Действительные и мнимые части спектральных компонент  (fn) с первого и второго выходов ЭЗКЧ 49 поступают соответственно на первый и второй входы второй пары входов второго УКЧ 48, где последовательно во времени производят вычисление комплексных параметров
(fn) с первого и второго выходов ЭЗКЧ 49 поступают соответственно на первый и второй входы второй пары входов второго УКЧ 48, где последовательно во времени производят вычисление комплексных параметров  , n по правилу
, n по правилу  =
=  (fn+k)
(fn+k) (fn) (14) для n= 1, 2, . . . , Nf-k. Действительные (мнимые) части этих значений с выхода первого (второго) УКЧ 48 поступают на первый (второй) вход НСКЧ 50, где суммируются в течение периода следования Тсл всех компонент
(fn) (14) для n= 1, 2, . . . , Nf-k. Действительные (мнимые) части этих значений с выхода первого (второго) УКЧ 48 поступают на первый (второй) вход НСКЧ 50, где суммируются в течение периода следования Тсл всех компонент  начиная с первого не нулевого значения, поступившего на один из входов НСКЧ 50, причем Тсл= NfTo. Полученная сумма действительных частей параметров
начиная с первого не нулевого значения, поступившего на один из входов НСКЧ 50, причем Тсл= NfTo. Полученная сумма действительных частей параметров  с первого выхода НСКЧ 50 поступает на первый вход (вход "знаменателя") ФП 51, а сумма мнимых частей параметров
с первого выхода НСКЧ 50 поступает на первый вход (вход "знаменателя") ФП 51, а сумма мнимых частей параметров  с второго выхода - на второй вход (вход "числителя") ФП 51. В ФП 51 производится вычисление аргумента комплексного числа, результат вычисления которого с выхода ФП 51 поступает на первый вход первого делителя 52, где производится деление его на частотное расстояние k Δ f. Результат деления с выхода первого делителя 52 поступает на вход НС 54. Кроме того, периодически с периодом Тсл с выхода ДДЧР 55 на управляющий вход ЭЗКЧ 49 и второй вход первого делителя 52 поступают сигналы, соответствующие следующим частотным расстояниям между спектральными компонентами для k от 2 до (Nf-1). Для каждого частотного расстояния k Δ f аналогично производятся действия над сигналами в блоках 49, 48, 50, 51 и 52. Результаты деления с выхода первого делителя 52 последовательно во времени поступают на вход НС 54, где они суммируются в течение интервала времени измерения взаимной задержки Δtτ , определяемого формулой
с второго выхода - на второй вход (вход "числителя") ФП 51. В ФП 51 производится вычисление аргумента комплексного числа, результат вычисления которого с выхода ФП 51 поступает на первый вход первого делителя 52, где производится деление его на частотное расстояние k Δ f. Результат деления с выхода первого делителя 52 поступает на вход НС 54. Кроме того, периодически с периодом Тсл с выхода ДДЧР 55 на управляющий вход ЭЗКЧ 49 и второй вход первого делителя 52 поступают сигналы, соответствующие следующим частотным расстояниям между спектральными компонентами для k от 2 до (Nf-1). Для каждого частотного расстояния k Δ f аналогично производятся действия над сигналами в блоках 49, 48, 50, 51 и 52. Результаты деления с выхода первого делителя 52 последовательно во времени поступают на вход НС 54, где они суммируются в течение интервала времени измерения взаимной задержки Δtτ , определяемого формулой
Δtτ = (Nf-1)Tсл= (Nf-1)NfTo, (15) начиная с момента поступления на вход НС 54 первого сигнала. Полученная сумма с выхода НС 54 поступает на первый вход второго делителя 53, на второй вход которого с выхода ПЗУ 56 поступает сигнал, соответствующий значению 2 π (Nf-1). В результате деления на выходе второго делителя 53, являющемся выходом (Вых. ) устройства измерения задержки (см. фиг. 5), появляется значение взаимной задержки τ12 между парой сигналов U1(t) и U2(t), поступивших на входы УИЗ.
Согласно фиг. 2, входы БИЗ 8, БИЗ 9 и БИЗ 10 объединены попарно и подключены к трем выходам соответствующих РПрБ 5, РПрБ 6 и РПрБ 7. Поэтому три БИЗ со структурой, представленной на фиг. 5, могут быть реализованы с использованием всего трех физических каналов последовательно соединенных АЦП и процессора БПФ, конструктивно могут быть объединены первые АЦП и процессор БПФ БИЗ 8 и вторые АЦП и процессор БПФ БИЗ 9, вторые АЦП и процессор БПФ БИЗ 8 и первые АЦП и процессор БПФ БИЗ 10, первые АЦП и процессор БПФ БИЗ 9 и вторые АЦП и процессор БПФ БИЗ 10.
Блок сравнения задержек 15 работает следующим образом.
Сигналы, поступающие на входы Вх. 1, Вх. 2 и Вх. 3 БСЗ 15 (см. фиг. 6) одновременно поступает на пару входов первого сумматора 57 и второй вход второго сумматора 58. Сумма сигналов с выхода первого сумматора 57 поступает на первый вход второго сумматора 58, где производится суммирование с сигналом, поступившим на его второй вход. Сигнал с выхода второго сумматора 58 поступает на вход порогового блока 59. Если сигнал на входе ПБ 59 не превышает порогового значения Pτ (см. формулу 3), то на выходе ПБ 59, являющемся выходом (Вых. ) БСЗ 15, формируется сигнал логической единицы, в противном случае - сигнал логического нуля.
Блок коррекции задержек 11, 12 и 13 может быть выполнен, например, как это показано на фиг. 9, и содержит два вычитателя 60 и 61, блок памяти расчетных взаимных задержек 62, блок памяти поправок 63 и имеет шины входа (вх. ), выхода (Вых. ), первого и второго управляющих входов (Упр. 1 и Упр. 2).
Блок сравнения и усреднения кодов БСУК 22 может быть выполнен, например, как это показано на фиг. 10, и содержит элемент формирования усредненного кода 64, три элемента сравнения 65, 66, 67 и имеет шины трех входов (Вх. 1, Вх. 2 и Вх. 3), первого и второго выходов (Вых. 1 и Вых. 2).
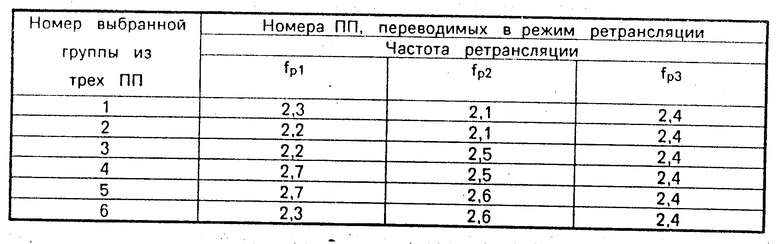
Для подтверждения возможности повышения точности местоопределения и пропускной способности предложенных способа и системы при относительном снижении реализационных затрат на современной базе серийно выпускаемых изделий и элементов разработан, изготовлен и исследован опытный образец (ОО) системы определения местоположения и идентификации подвижных объектов. Радиоприемные блоки 5, 6 и 7 совместно с приемной антенной 4, передатчик управления 26 центрального пункта 1, радиоприемные и радиопередающие блоки 33 и 34 совместно с приемными и передающими антеннами 32 и 35 каждого приемного пункта реализованы на базе комплекса радиостанций "Маяк-С". В качестве аналого-цифровых преобразователей устройств измерения задержки 8, 9 и 10 использовались преобразователи Ф 4223. Процессоры БПФ блока измерения задержки 8, 9 и 10 реализованы в виде специализированных процессоров на основе использования алгоритмов. Остальные элементы блоков измерения задержки 8, 9 и 10, блока коррекции задержек 11, 12 и 13, блок расчета координат 14, блок сравнения задержек 15, демодуляторы 16, 17 и 18 и блок сравнения и усреднения кодов 22 выполнены на базе ЭВМ МС-1212. Блоки опознавания кодов приемных пунктов 19, 20 и 21, блок опознавания кода объекта 23, управляющий блок 24 и блок индикации 25 реализованы на базе ЭВМ IBM РС/АТ-286. Система была размещена в городских условиях. Схема варианта расположения на местности приемных пунктов при N= 7 показана на фиг. 11. В таблице приведен один из вариантов порядка ретрансляции сигналов группами этих приемных пунктов. Для работы системы использовались четыре частоты в диапазоне УКВ. Расстояние между ближайшими приемными пунктами ОО составляло 3-4 км. Мощность используемых передатчиков подвижных объектов 1-2 Вт, ширина спектра сигналов ППО 30 кГц. В качестве блока индикации использовался монитор ЭВМ IBM PC/АТ-286, на котором отображалась электронная карта города, где размещена система. В результате экспериментальных исследований ОО получены следующие основные характеристики системы:
инструментальная среднеквадратическая погрешность измерения координат подвижных объектов - 50 м;
пропускная способность местоопределения и идентификации объектов - 1 местоопределение и идентификация за 20-30 мс;
среднеквадратическая погрешность измерения взаимных задержек сигналов - 0,1-0,2 мкс.
Таким образом, использование в предложенных способе и системе определения местоположения и идентификации подвижных объектов следующих отличительных признаков: перенос основных операций по обработке сигналов на центральный пункт за счет ретрансляции этих сигналов на ЦП; измерение взаимной задержки сигналов на основе спектральной обработки сигналов; применение режима периодического включения передатчиков подвижных объектов при одновременном выявлении интервалов времени, в течение которых в зоне действия трех приемных пунктов работает только один передатчик объекта; применение принципа последовательного обзора пространства путем перевода в режим ретрансляции соответствующих групп из трех приемных пунктов, для чего введено необходимое управление приемными пунктами, причем передатчик управления применяется одновременно для калибровки системы, позволяет по сравнению с прототипом, а также известными техническими решениями в данной области повысить точность определения местоположения подвижных объектов и пропускную способность определения местоположения и идентификации подвижных объектов, а также существенно сократить затраты на техническую реализацию.
Так как в предложенных способе и системе не требуется единая синхронизация процессов измерений параметров сигналов и установка единого порогового уровня в пространственно разнесенных приемных пунктах, существенно сокращено число каналов связи приемных пунктов с центральным пунктом (всего три канала связи) и все передатчики подвижных объектов работают на одной частоте.
Принципиальное отличие предложенной системы заключается в ее многофункциональности: одна система способна обеспечить информацией все или почти все службы города в считанные секунды. Это, например, позволяет осуществлять быстрое раскрытие преступлений по "горячим следам" с привлечением гораздо меньших сил и средств.
Предложенная система является достаточно гибкой, т. е. может быть использована для обслуживания как малых, так и больших территорий. Эта система является коммерческой, так как продажа ее элементов (передатчиков объектов) населению, отдельным городским службам, установка передатчиков на охраняемый объект, взятие абонентского налога позволяет быстро окупить стоимость системы, а в дальнейшем приносить существенный доход владельцу системы. Кроме того, внедрение предложенной системы позволит резко улучшить информационное обеспечение городских служб с указанием точных координат мест происшествий и идентификацией охраняемых конкретных объектов, что должно привести к весьма существенному повышению процента раскрываемости преступлений и резкому снижению расходов на раскрытие каждого отдельного преступления.
1. Способ определения местоположения и идентификации подвижных объектов, заключающийся в излучении сигналов передатчиками подвижных объектов, снабженных индивидуальными кодами, приеме и демодуляции сигналов в N пространственно разнесенных приемных пунктах с известными координатами, где N > 3, идентификации подвижных объектов на основе демодуляции сигналов и вычислении координат подвижных объектов на центральном пункте с известными координатами по взаимным задержкам принятых в приемных пунктах сигналов передатчиков подвижных объектов, скорректированным на поправки, получаемые при калибровке, периодически осуществляемой путем излучения на частоте передатчиков подвижных объектов из пункта с известными координатами сигнала с опознавательным кодом калибровки, приема его в этих приемных пунктах и запоминания в виде поправок результатов сравнения полученных взаимных задержек между сигналами, принятыми в приемных пунктах, с известными расчетными величинами, отличающийся тем, что принятые в приемных пунктах сигналы ретранслируют с переносом спектра на центральный пункт, где эти сигналы принимают с преобразованием на единую промежуточную частоту и измеряют взаимные задержки между ними, причем ретрансляцию сигналов производят одновременно только тремя приемными пунктами в течение установленного промежутка времени, для чего с центрального пункта на частоте передатчиков подвижных объектов периодически излучают сигнал управления, содержащий индивидуальные коды приемных пунктов, принимают его в приемных пунктах, демодулируют и при совпадении переданного кода с индивидуальным кодом приемного пункта осуществляют ретрансляцию сигналов этим приемным пунктом, при этом в сигнале управления формируют индивидуальные коды трех близлежащих приемных пунктов с последовательным перебором от цикла к циклу кодов всех N приемных пунктов, в установленные промежутки времени в сигнале управления формируют опознавательный код калибровки, причем передатчики подвижных объектов излучают сигналы периодически с установленной скважностью, идентификацию подвижных объектов и опознавание кода калибровки производят на центральном пункте по результатам демодуляции, сравнения и формирования усредненного кода сигналов, принятых одновременно с трех приемных пунктов, вычисление координат, идентификацию подвижных объектов и калибровку производят в случае равенства нулю суммы трех измеренных значений взаимных задержек между парами сигналов, принятых с первого и второго, второго и третьего, третьего и первого приемных пунктов выбранной группы приемных пунктов и совпадения кодов сигналов, ретранслированных этими приемными пунктами.
2. Способ по п. 1, отличающийся тем, что для измерения взаимной задержки сигналов в каждой из пары сигналов, принятых с первого и второго, второго и третьего, третьего и первого приемных пунктов выбранной группы, приемных пунктов Ui(t) и Uj(t), где i = 1,2,3, j = 1,2,3, i ≠ j синхронно производят их дискретизацию во времени и квантование по уровню, преобразуют полученные дискретные временные отсчеты этих сигналов в совокупность дискретных комплексных спектральных компонент Ui(fn) и Uj(fn соответственно и вычисляют взаимную задержку τij по правилу
τ12=  arg
arg (fn)
(fn) (fn)
(fn) f
f f
f ,
,
где Nf - количество спектральных компонент сигналов;
n = 1,2,3, . . . , Nf - номер спектральной компоненты сигналов.
Δ f= fn+1-fn - частотное расстояние между соседними спектральными компонентами сигналов;
k = 1,2,3, . . . , Nf-1 - масштабный множитель частотного расстояния между спектральными компонентами сигналов;
arg{  } - аргумент комплексной величины
} - аргумент комплексной величины  .
.
3. Система определения местоположения и идентификации подвижных объектов, содержащая передатчики подвиженых объектов, N пространственно разнесенных приемных пунктов с известными координатами, где N > 3, и центральный пункт с известными координатами, причем каждый передатчик подвижных объектов включает последовательно соединенные генератор кода объекта, радиопередающий блок и передающую антенну, каждый приемный пункт включает последовательно соединенные приемную антенну, радиоприемный блок и демодулятор, а центральный пункт включает блок расчета координат, блок опознавания кода объекта, блок индикации, управляющий блок и три блока коррекции задержек, выходы которых подключены к соответствующим входам блока расчета координат, выход которого подключен к первому входу управляющего блока, второй вход которого подключен к выходу блока опознавания кода объекта, а первый и второй выходы подключены соответственно к входу блока индикации и к объединенным первым управляющим входам первого , второго и третьего блоков коррекции задержек, вторые управляющие входы которых подключены соответственно к третьему, четвертому и пятому выходам управляющего блока, отличающаяся тем, что в каждый передатчик подвижных объектов введен генератор импульсов, выход которого подключен к управляющему входу радиопередающего блока, в каждый приемный пункт введены последовательно соединенные радиопередающий блок и радиопередающая антенна и последовательно соединенные блок опознавания кода приемного пункта и генератор одиночного импульса, выход которого подключен к управляющему входу радиопередающего блока, вход которого подключен к выходу радиоприемного блока, а вход блока опознавания кода приемного пункта подключен к выходу демодулятора, кроме того, в центральный пункт введены приемная антенна, три радиоприемных блока, объединенные входы которых подключены к выходу приемной антенны, три блока измерения задержки, блок сравнения задержек, три входа которого объединены с входами соответствующих трех блоков коррекции задержек и подключены к выходам соответствующих блоков измерения задержки, а выход подключен к третьему входу управляющего блока, три демодулятора, входы которых подключены к выходам соответствующих радиоприемных блоков, три блока опознавания кода приемного пункта, входы которых подключены к выходам соответствующих демодуляторов, блок сравнения и усреднения кодов, три входа которого подключены к выходам соответствующих демодуляторов, а первый и второй выходы - соответственно к входу блока опознавания кода объекта и четвертому входу управляющего блока, шестой выход которого подключен к объединенным управляющим входам блока расчета координат и блока опознавания кода объекта, и передатчик управления, содержащий генератор кода приемных пунктов, генератор кода калибровочного сигнала и последовательно соединенные коммутатор, радиопередающий блок и передающую антенну, причем два входа коммутатора подключены соответственно к выходам генератора кода приемных пунктов и генератора кода калибровочного сигнала, а вход генератора кода приемных пунктов и управляющие входы коммутатора и радиопередающего блока подключены к седьмому, восьмому и девятому выходам управляющего блока, соответственно пятый, шестой и седьмой входы которого подключены к выходам соответствующих блоков опознавания кода приемного пункта, объединенные первый вход первого и второй вход второго блоков измерения задержки, объединенные второй вход первого и первый вход третьего блоков измерения задержки и объединенные первый вход второго и второй вход третьего блоков измерения задержки подключены к выходам соответствующих радиоприемных блоков.
4. Система по п. 3, отличающаяся тем, что блок измерения задержки содержит два аналого-цифровых преобразователя, два процессора быстрого преобразования Фурье (БПФ), два умножителя комплексных чисел, элемент задержки комплексных чисел, функциональный преобразователь вида arctg x/y, два делителя, накапливающий сумматор комплексных чисел, датчик дискретных частотных расстояний и постоянное запоминающее устройство, причем выходы аналого-цифровых преобразователей подключены к входам соответствующих процессоров БПФ, пары выходов которых подключены к соответствующим парам входов первого умножителя комплексных чисел, пара выходов которого подключена соответственно к одной паре входов второго умножителя комплексных чисел и к паре входов элемента задержки комплексных чисел, пара выходов которого подключена к другой паре входов второго умножителя комплексных чисел, пара выходов которого подключена к паре входов накапливающего сумматора комплексных чисел, пара выходов которого подключена к паре входов функционального преобразователя вида arctg x/y, выход которого подключен к первому входу первого делителя, выход которого подключен к входу накапливающего сумматора, комплексных чисел, выход которого подключен к первому входу второго делителя, к второму входу которого подключен выход постоянного запоминающего устройства, выход датчика дискретных частотных расстояний подключен к объединенным управляющему входу элемента задержки комплексных чисел и второму входу первого делителя, причем входы двух аналого-цифровых преобразователей и выход второго делителя является соответственно входами и выходами блока измерения задержки.
5. Система по п. 3, отличающаяся тем, что блок сравнения задержек содержит два сумматора и пороговый блок, причем выход первого сумматора подключен к первому входу второго сумматора, выход которого подключен к входу порогового блока, пара входов первого сумматора, второй вход второго сумматора и выход порогового блока являются соответственно тремя входами и выходом блока сравнения задержек.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2158004C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2285937C2 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2021 |
|
RU2772812C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263928C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2003 |
|
RU2263926C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2516432C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ПО ТРЕВОЖНЫМ РАДИОСИГНАЛАМ | 2002 |
|
RU2263323C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТРУКТУРЫ СИМПЛЕКСНОЙ РАДИОСЕТИ МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2008 |
|
RU2383031C2 |
| МЕТКА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И КОНТРОЛЯ ОБЪЕКТОВ | 2007 |
|
RU2371734C2 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
Использование: радиотехника, системы определения координат источников радиоизлучения, для информационного обеспечения, различных городских служб. Сущность изобретения: способ заключается в излучении кодированных сигналов передатчиков объектов, приеме их в N пространственно разнесенных пунктах, где N больше 3, с последующей ретрансляцией на центральный пункт и измерением взаимных задержек на основе взаимного спектра сигналов, при этом ретрансляцию сигналов из трех пунктов осуществляют одновременно, для чего режимами ретрансляции управляют, сигналы передатчиками излучают периодически, осуществляют измерение и калибровку в выявленные интервалы времени приема только одного сигнала тремя близлежащими пунктами, идентифицируют объекты на основе демодуляции сигналов и вычисляют координаты по взаимным задержкам, скорректированным на калибровочные поправки. 2 с. п. ф-лы, 3 з. п. ф-лы, 11 ил. , 1 табл.
τ12=  arg
arg (fn)
(fn) (fn)
(fn) f
f f
f ,
,
где Nf - количество спектральных компонент сигналов;
n = 1,2,3, . . . , Nf - номер спектральной компоненты сигналов.
Δ f= fn+1-fn - частотное расстояние между соседними спектральными компонентами сигналов;
k = 1,2,3, . . . , Nf-1 - масштабный множитель частотного расстояния между спектральными компонентами сигналов;
arg{  } - аргумент комплексной величины
} - аргумент комплексной величины  .
.
