Современное состояние аэродинамики, а также небольшой вес авиационных двигателей допускают в настоящее время постройку летательных аппаратов со столь небольшим сопротивлением воздуху, что даже при остановке одного из двигателей двухмоторного аппарата остающийся мотор все еще развивает мощность, вполне достаточную для беспрепятственного продолжения полета.
Но до сих пор не удавалось уравновесить возникающую вследствие выведения из работы одного из двигателей асимметрию приводного усилия путем соответствующего перекладывания руля, чтобы сохранялась достаточная степень боковой и поперечной устойчивости. Хотя и случалось, что двухмоторные аппараты с лежащими по сторонам пропеллерами были в состоянии довольно продолжительное время летать по прямому направлению при работе одного только двигателя, но это большей частью объяснялось слабой нагрузкой аппаратов.
На практике не представляется возможным придать рулю бокового управления такую величину или корпусу аппарата такую длину, чтобы и при остановке одного из расположенных по бокам аппарата винтов действия руля направления хватало с достаточным запасом для обеспечения прямолинейного полета.
Предлагаемое изобретение имеет целью устранить указанные затруднения тем, что вся система бокового управления аппарата поворачивается относительно направления полета в такой степени, что вредная асимметрия воздушного потока, вызываемая односторонним действием пропеллера, полностью компенсируется.
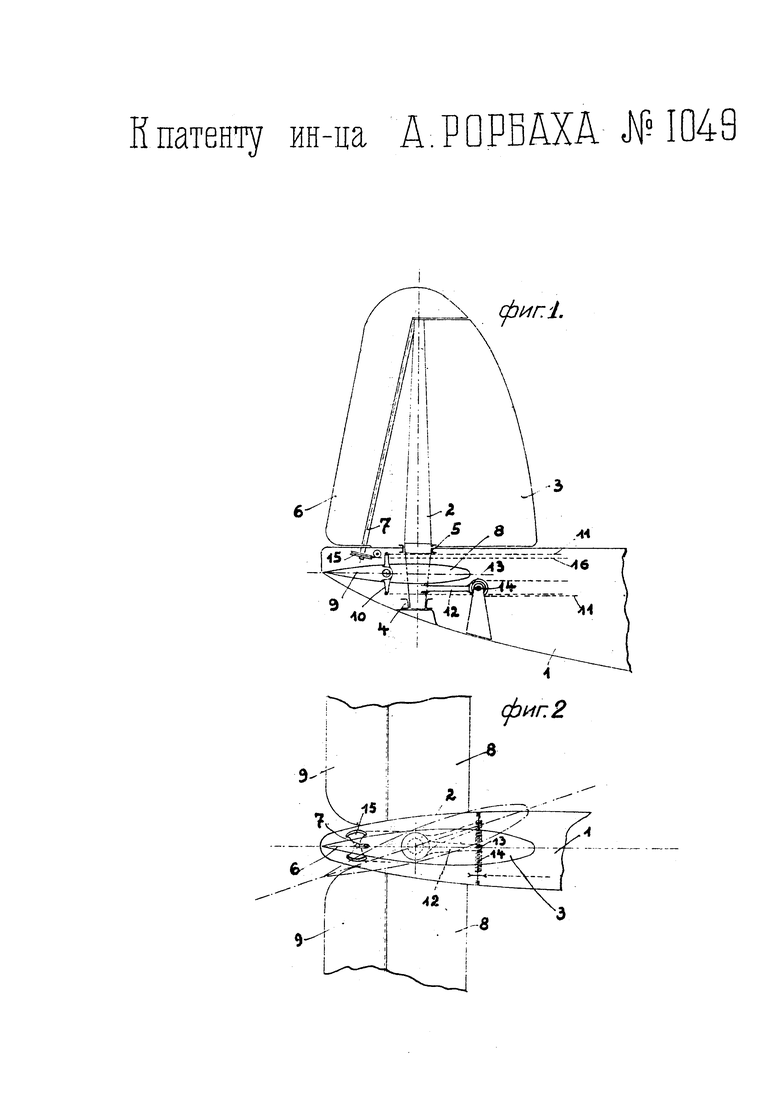
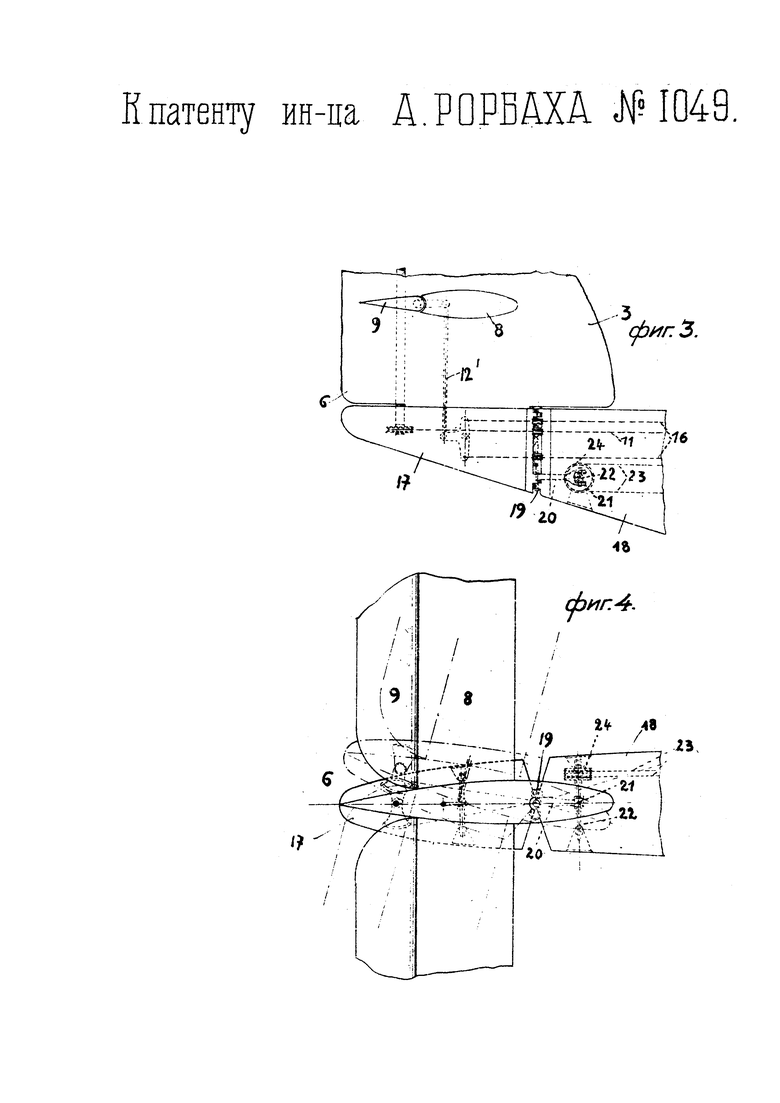
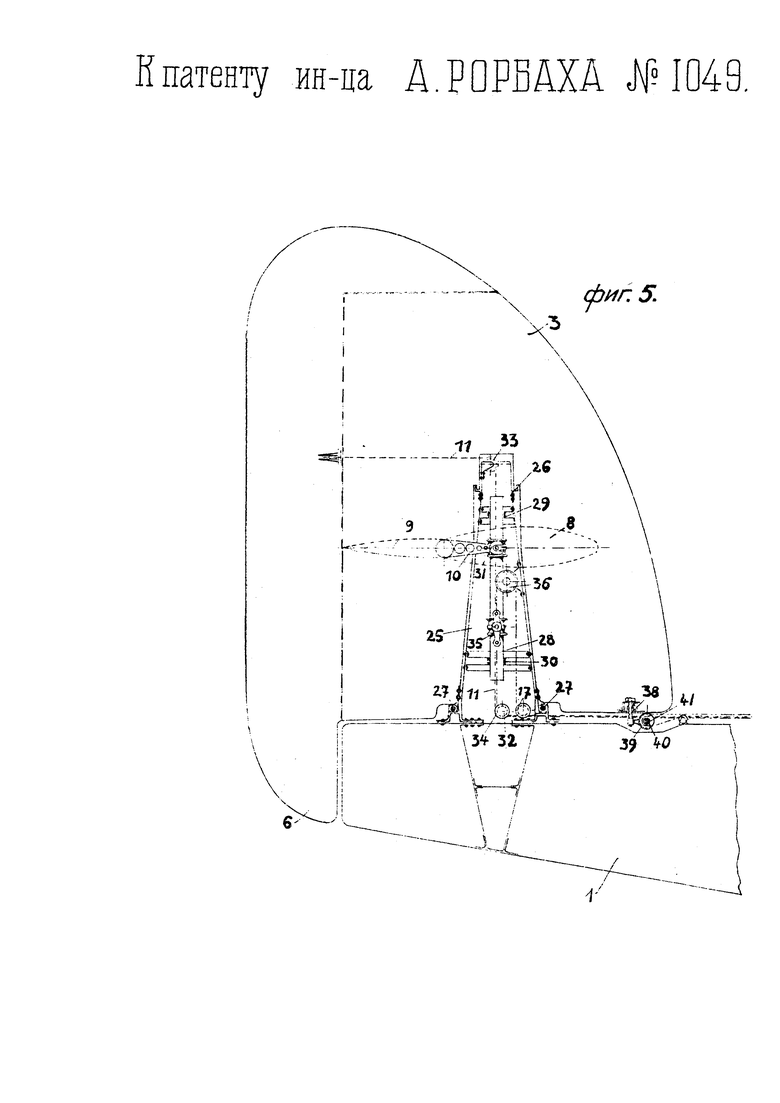
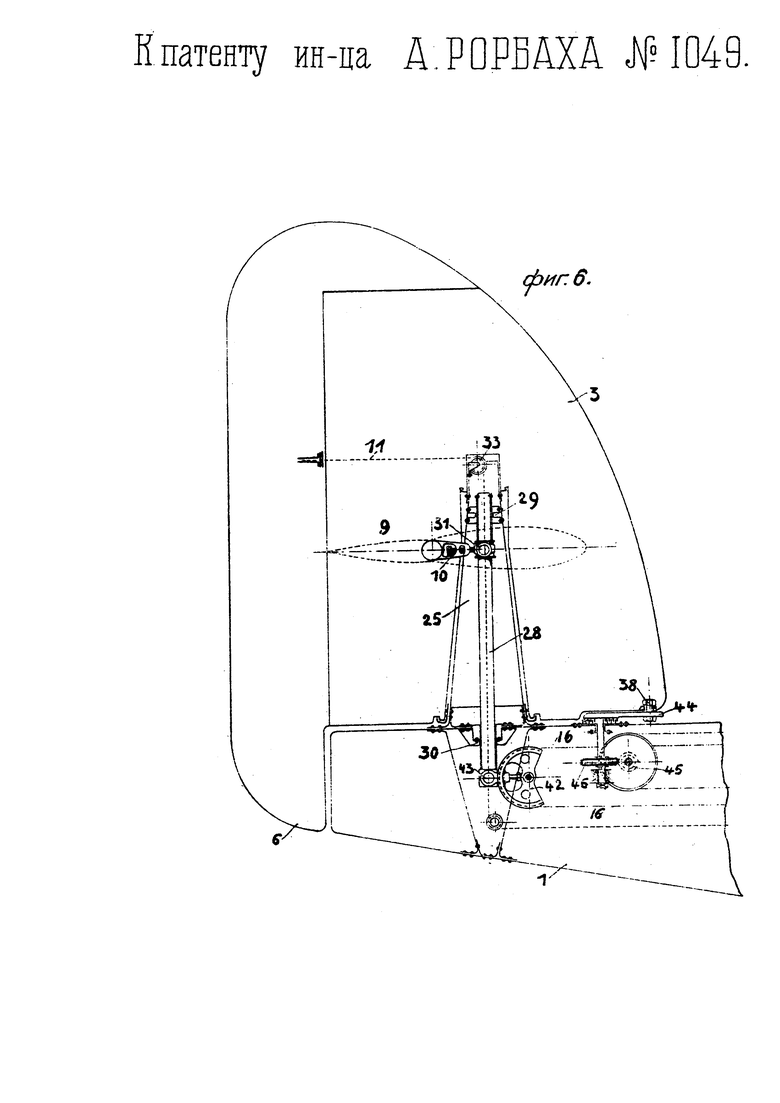
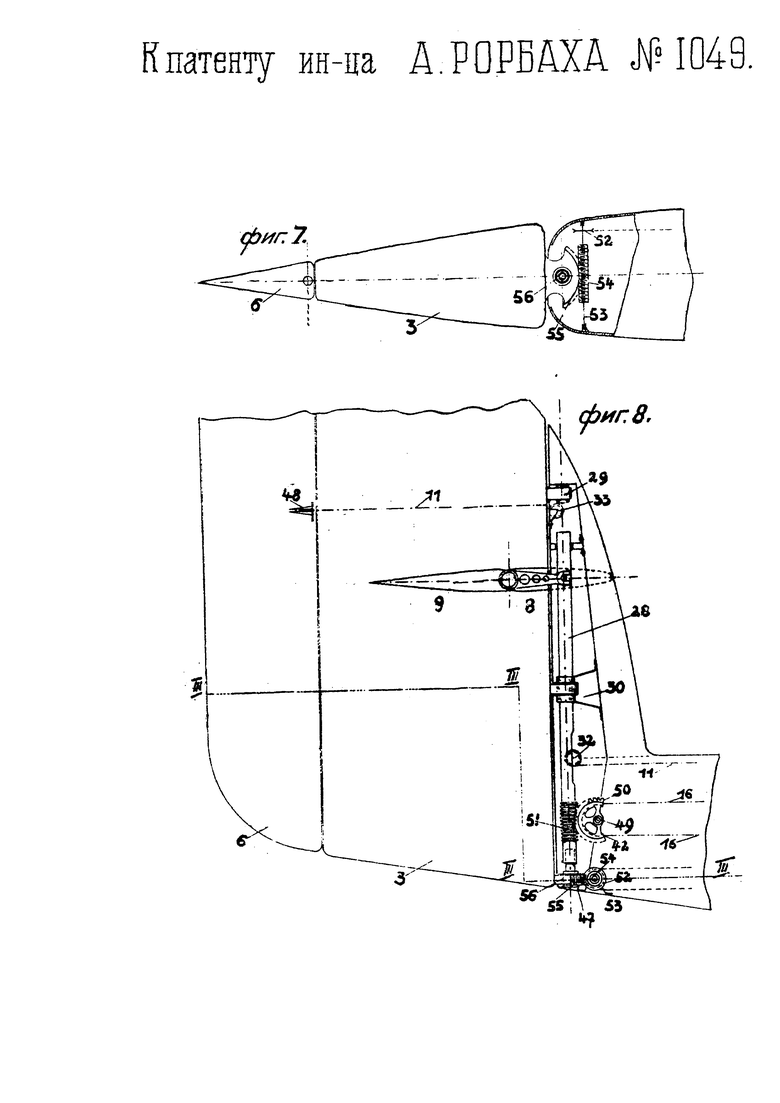
На чертежах фиг. 1 изображает боковой вид системы управления летательного аппарата; фиг. 2 - вид сверху той же системы; фиг. 3 и 4 - соответствующие виды варианта системы управления; фиг. 5 - боковой вид поворотной системы управления в схематическом изображении; фиг. 6 - видоизменение системы управления; фиг. 7 - сечение системы управления по линии III-III, на фиг. 8; фиг. 8 - боковой вид варианта системы управления.
Система бокового управления укреплена на задней части корпуса 1 аппарата при помощи колонки 2. Эта колонка скреплена с вертикальным стабилизатором 3 и может поворачиваться в подпятнике 4 и в подшипнике 5 корпуса 1. На стабилизаторе 3 укреплен поворотно вокруг оси 7 руль направления 6. Система вертикального управления (рулем высоты) в данном случае неподвижно скреплена с корпусом. Руль высоты 9 шарнирно соединен с горизонтальным стабилизатором 8 так, что он поворачивается при натягивании одного из тросов 11, прикрепленных к рулевому рычагу 10. Поворот всей системы бокового или горизонтального управления достигается вращением колонки 2 в ее опорах, для чего колонка 2 снабжена рычагом 12, который несет на своем свободном конце гайку 13, взаимодействующую с шпинделем 14; при повороте шпинделя 14 происходит перемещение гайки 13, которая вызывает поворот колонки 2, а вместе с ней вращение всей системы горизонтального управления.
Для поворота собственно руля направления 6 на конце его оси 7 сидит двойной сегментный рычаг 15, с которым скреплены тросы 16 так, что при натяжении одного из них происходит поворот руля 6.
На фиг. 3 и 4 изображено видоизменение предлагаемого устройства, которое состоит в том, что система вертикального управления укреплена на системе горизонтального управления. Чтобы и в этом случае получить возможность поворота всей системы управления, задняя часть 17 аэроплана 18 соединена с последним шарнирно. Вращение части 17 совершается около оси 19 посредством рычага 20, наглухо скрепленного с частью 17 и снабженного на конце гайкой 21, могущей перемещаться по шпинделю 22. При посредстве тросов 23 и барабана 24 шпиндель 22 приводится во вращение и вызывает поворачивание заднего конца 17 корпуса 18, в результате чего и происходит поворот всей системы управления аппарата, принимающей при этом косое положение относительно средней вертикальной поверхности аэроплана. Система вертикального управления 8, 3 укреплена на вертикальном плавнике 3, при чем руль высоты 9 управляется таким же образом, как и выше, при посредстве рычажного механизма 121. Поворот системы горизонтального управления также сходен с соответствующим приспособлением в рассмотренном выше устройстве.
При обоих описанных выше устройствах возникают однако большие затруднения в отношении снабжения системы поворотной в корпусе, вертикальной цапфой, а также в отношении устройства отдельной задней части, соединенной поворотно с передним корпусом аппарата.
От указанного выше недостатка свободны устройства, изображенные на фиг. 5-8. Здесь опорной частью для всей системы управления в целом служит вертикальная цапфа 25, укрепленная на заднем конце корпуса 1 аэроплана и несущая на себе опоры, необходимые для поворота системы управления, а именно в верхней части опору в виде пяты 26, а в нижней части - шариковый или роликовый подшипник 27. Внутри самой цапфы 25 помещена полая направляющая труба 28, сидящая в двух подшипниках 29 и 30, в которых она может перемещаться в продольном направлении, и соединенная с рулем высоты 9. Тяговые тросы 11, служащие для поворота руля направления, проходят точно в центре цапфы, чтобы не испытывать напряжений при повороте системы управления. Ввиду движения рычага 10 руля высоты по кругу, применено подвижное устройство шарнирного сцепления 31, исключающего защемление между направляющей 28 и рычагом 10. Тяговые тросы 11, поворачивающие руль направления 6, идут от сидения пилота через направляющий блок 32 внутрь направляющей 28 и через ролик 33 у верхнего конца цапфы 25 к рычагу руля направления.
Тяговые тросы руля высоты идут через блок 34 и скрепляются с муфтой 35; от нее они идут на блок 36, меняют направление и затем по направляющему блоку 17 возвращаются к месту пилота.
Поворот всей системы управления совершается вокруг серединной цапфы 25, для чего у переднего конца вертикального стабилизатора 3 укреплена посредством болта 38 гайка 39, которая сцеплена с винтовым шпинделем 40. Шаг резьбы шпинделя выбран с таким расчетом, что в любом положении гайки имело место самотормажение. Шпиндель 40 вращается при посредстве сидящего на нем ролика 41, вокруг которого идут тяговые тросы, приводимые в действие с места сидения пилота.
При устройстве, изображенном на фиг. 6, все тяговые тросы для перестановки системы управления проложены внутри корпуса аппарата, в видах уменьшения сопротивления воздуха. Помимо того, здесь несколько видоизменен привод поворотного механизма с целью получения возможно меньших размеров серединной цапфы, внутри которой помещена только гладкая трубчатая направляющая, без блоков, муфт и пр. Этим достигается, наряду с значительным упрощением приспособления, удешевление его стоимости,. без ущерба для надежности действия.
При таком устройстве привод руля направления осуществляется тем же способом, как и в варианте изображенном на фиг. 5, перевод же руля высоты упрощается, так как тяговые тросы 16 проходят по сегменту 42, поворот которого вызывает продольное перемещение направляющей 43, 28, так что не требуется проводить тяги через реверсирующий блок, помещенный внутри цапфы 25.
Равным образом в этом устройстве несколько видоизменен и механизм вращения всей системы управления вокруг цапфы 25. При чем самый поворот вызывается отклонением кривошипа 44, цапфа 38 которого соединена с вертикальным стабилизатором 3. Отклонение кривошипа может быть произведено сидящим на общей с ним оси червячным колесом 46, приводимым в действие червяком 45.
Вариант, изображенный на фиг. 7 и 8, имеет по сравнению с предыдущими то преимущество, что здесь возможно одновременно укорочение корпуса и увеличение размеров вертикального стабилизатора. При этом цапфа, вокруг которой поворачивается система, устраивается в передней части вертикального стабилизатора. Внутри цапфы попрежнему имеется направляющая труба 28, поддерживаемая подшипниками 29, 30 и 47, в которых она может перемещаться в продольном направлении. Внутри направляющей трубы 28 проходят тяговые тросы 11, идущие через блоки 32 и 33 к рычагу 48 руля направления. Тяговые тросы руля высоты идут к сектору 42, на оси 49 которого насажен зубчатый сектор 50, сцепленный с круглой зубчатой рейкой 51 направляющей трубы 28. Поворот сектора 50 натяжением троса 16 вызывает таким образом приподымание или опускание направляющей 28, а следовательно и поворот руля высоты.
Поворот всей системы управления вызывается вращением канатного шкива 52, на оси 53 которого сидит червяк 54, сцепленный с червячным сектором 55. Целесообразна такая конструкция сектора 55, которая одновременно допускает его использование в качестве подшипника для вертикального плавника 3.
Следует отметить еще, что в последнем из описанных выше устройств расстояние между опорами очень велико, ввиду чего давления в них значительно меньше, чем в случае, когда эти опоры приходится располагать близко друг от друга.
Описанное устройство действует следующим образом: при полете с двумя двигателями вся система управления занимает свое нормальное положение, иными словами она расположена в средней вертикальной плоскости аппарата. При остановке одного из двигателей или пропеллеров летчик поворачивает при посредстве тяговых тросов всю систему управления в косое положение, уравновешивающее асимметрию приводного усилия. Угол отклонения системы управления может быть выбран большим или меньшим, смотря по надобности. В виду самотормажения поворачивающего механизма вся система управления замыкается в любом положении, в которое она установлена.
1. Устройство органов стабилизации и управления в аэропланах, снабженных несколькими рядом установленными моторами, характеризующееся применением колонки 2 (фиг. 1 и 2), установленной поворотно в корпусе аэроплана 1 и соединенной наглухо с вертикальным стабилизатором 3, на оси которого 7 поворотно укреплен руль направления 6, каковая колонка снабжена рычагом 12, несущим на своем свободном конце гайку 13, взаимодействующую со шпинделем 14, приводимым во вращение при помощи насаженной на ось его передачи, поворот же руля направления 6 производится посредством двойного сегментного рычага 15, с которым соединены идущие к пилоту тросы 16, руль же высоты 9 поворотно соединен с горизонтальным стабилизатором 8 и может быть поворачиваем одним из тросов 11, прикрепленных к рулевому рычагу 10.
2. Видоизменение описанного в п. 1 устройства, отличающееся тем, что вращение органов горизонтального управления производится вместе с укрепленными на них органами вертикального управления (фиг. 3 и 4), с каковою целью кормовая часть 17 корпуса аэроплана 18 соединена с последним при помощи вертикальной оси 19, снабженной рычагом 20 в конце которого установлена гайка 21, могущая перемещаться по шпинделю 22, вращаемому посредством барабана 24 и троса 23, руль же высоты 9 управляется посредством рычажного механизма 121.
3. Видоизменение описанного в п. 2 устройства, отличающееся тем (фиг. 5), что опорной частью всей системы управления служит вертикальная цапфа 25, поворотно укрепленная на корме корпуса 1, внутри которой помещена полая направляющая труба 28, сидящая на подшипниках 29 и 30, в которых она может перемещаться в продольном направлении, каковая труба несет при посредстве рычага 10 руль высоты 9, тяговые тросы которого идут от пилота через блок 34, укрепляются к муфте 35 и далее, огибая блок 36, возвращаются через направляющий блок 17 обратно к пилоту, тяговые же тросы руля направления 11 идут от пилота через блок 32 внутрь трубы 28 и через ролик 33 к рычагу руля, поворот же всей системы управления производится вокруг цапфы 25, с каковой целью в стабилизаторе 3 укреплена посредством болта 38 гайка 39, сцепленная с винтовым шпинделем 40, могущим вращаться при помощи ролика 41, от которого тросы идут к пилоту.
4. Видоизменение описанного в п. 3 устройства, отличающееся тем, что все тяговые тросы проходят внутри корпуса аэроплана (фиг. 6), с каковою целью тяговые тросы руля высоты 16 проходят по укрепленному внутри корпуса сегменту 42, поворот которого вызывает продольное перемещение трубы 28, 43, поворот же всей системы управления производится отклонением кривошипа 44, цапфа 38 которого соединена со стабилизатором 3, каковое отклонение кривошипа может быть произведено червячным колесом 46, приводимым в действие червяком 45.
5. Видоизменение описанного в п. 4 устройства, отличающееся тем (фиг. 7 и 8), что труба 28 поддерживается на подшипниках 29, 30 и 47, внутри каковой трубы проходят тяговые тросы 11, идущие через блоки 32 и 33 к рычагу 48 руля направления, тяговые же тросы руля высоты идут к сектору 42, на оси 49 которого насажен зубчатый сектор 50, сцепленный с зубчатой рейкой 51 трубы 28, поворот какового сектора тросом 16 может вызвать продольное движение трубы 28, а следовательно и поворот руля высоты, поворот же всей системы управления может быть произведен вращением шкива 52, на оси 53 которого насажен червяк 54, сцепленный с червячным сектором 55.
