Изобретение относится к авиационной технике, в частности к летательным аппаратам с машущими крыльями, и предназначено для обеспечения свободного, парящего полета человека в восходящих и встречных потоках воздуха.
Известен проект летательного аппарата с машущими крыльями, содержащий корпус с установленными на нем крыльями, соединенными с пружинами, колеса шасси, на которых установлено устройство, состоящее из двух барабанов с храповыми механизмами (см. RU №2129076, МПК В64С 33/02, 20.04.1999 г.).
В известном аппарате автор попытался решить задачу маховых движений крыльев путем создания механической резонансной системы. Однако реализация подобных систем с «барабанами», гибкими лентами, «паразитным» шкивом и другими технически сложными приспособлениями представляется невозможной по причине ненадежности передаточных узлов и деталей, их суммарных весовых значений и практическим отсутствием управляемости аппарата.
Наиболее близким по назначению и технической сущности к заявленному изобретению является дельтамахолет, включающий остов, на котором шарнирно закреплены крылья, содержащие лонжерон, нежесткую обшивку и латы, рулевую трапецию с мачтой, гибкие тяги с натяжными роликами, подвесную систему пилота (см. RU №2263610, МПК В64С 31/028, В64С 33/02, 10.11.2005 г.).
В основу прототипа принят обычный дельтаплан, который переоборудуется в летательный аппарат с машущими крыльями. В данном аппарате пилот, висящий в подвесной системе, перекатываясь на ролике, воздействует на рулевую трапецию, создает момент усилия для маховых движений крыльев, т.е. на шарнирно закрепленные поверхности дельтаплана.
Недостатками такого летательного аппарата являются ненадежная система передачи усилий на крыло через сложную систему гибких тяг и роликов, отсутствие жесткой опоры у пилота для приложения усилий для обеспечения маховых движений и отсутствие эффективного управления углом атаки машущих крыльев, что является обязательным условием машущего полета. Основным недостатком данного прототипа является ограниченная до 20 м2 воздухонепроницаемая поверхность дельтаплана, которая, как известно, обеспечивает только кратковременный планирующий полет человека с возвышенностей, что не может считаться свободным полетом.
Необходимо отметить, что данный недостаток характерен для всех ранее известных проектов летательных аппаратов с машущими крыльями, в которых крылья приняты как воздухонепроницаемые поверхности, что успешно применяются для создания только малых моделей. Однако с увеличением массы аппарата необходимая для обеспечения полета площадь поверхности крыльев многократно увеличивается. При этом пропорционально увеличивается масса конструкции аппарата до значений, полностью исключающих отрыв аппарата от земли и свободный полет.
Таким образом, все известные аналоги ранее изобретенных летательных аппаратов с машущими крыльями имеют общие принципиальные недостатки, не позволяющие добиться успешного полета, независимо от применения в них мускульных усилий самого пилота и (или) двигателей разных конструкций и мощности.
Детальный анализ полетов птиц, прежде всего - парящих, а также внимательное изучение конструкции их крыльев, строения перьев и их взаиморасположения в крыльях позволило заявителю сделать однозначный вывод о том, что механическое увеличение площади крыльев из воздухонепроницаемого материала для создания махолетов не позволит добиться необходимого результата - свободного, парящего полета человека в воздухе.
Общеизвестно, что строение опорных перьев птиц состоит из множества пленок (мембран), расположенных поперек стержня перьев под определенным углом. Сами перья и основная часть крыльев птиц воздухопроницаемы. Таким образом, в крыльях парящих птиц в упорядоченном виде под углом к потоку воздуха расположены поверхности, суммарная площадь которых превышает площадь самих крыльев в несколько раз! При этом достигается удельный вес парящей птицы к суммарной поверхности мембран в крыльях и площади самих крыльев до значений не более 1,250 кг/м2, что равняется удельному весу самого воздуха. Вместе с тем, расчеты удельного веса по видимой части площади крыльев парящих птиц (в проекции) показывают значения, многократно превышающие удельный вес воздуха. При таких показателях сплошных воздухонепроницаемых поверхностей крыльев птиц машущие полеты, тем более в парящем режиме, оказываются невозможными. Данный вывод подтверждается многочисленными экспериментами с живыми птицами: при смазывании крыльев воздухонепроницаемыми составами птицы полностью теряли свои летательные способности.
В результате анализа маховых движений крыльев птиц в полете отмечено, что колебательный маховый процесс происходит в упругом режиме, т.е. для маха крыльев не требуется приложения больших разовых усилий, а требуется приложение импульсов сил, возбуждающих колебательные движения упругой системы вплоть до резонансных значений. При этом частота импульсов силы, прилагаемых к крыльям, совпадает с частотой собственных колебаний этой упругой системы в воздушном потоке.
Обязательным условием обеспечения полета аппаратов с машущими крыльями является также то, что при любом режиме махового процесса крылья не теряют эффективную управляемость.
В современной теории по аэродинамике исключительно мало уделено внимания на создание и развитие теории по биоаэродинамике, т.е. по детальному и всестороннему исследованию разнообразных летательных способностей птиц и насекомых в природе для создания на его основе летательных аппаратов с машущими крыльями.
В основу представленного изобретения поставлена задача реального использования скрытых до настоящего времени дополнительных источников энергии для обеспечения свободного, парящего полета человека в воздухе.
Технический результат изобретения заключается в создании условий для свободного, парящего полета человека в воздухе, улучшении аэродинамики и управляемости крыльев аппарата, обеспечении надежности, безопасности полета.
Указанный технический результат достигается тем, что в биоаэродинамическом летательном аппарате с машущими крыльями, содержащем фюзеляж, к которому шарнирно закреплены крылья, между которыми прикреплены резиновые пружины, подвесную систему пилота, рулевое управление, хвостовой стабилизатор, согласно изобретению крылья аппарата состоят из трех частей - передней и задней с воздухонепроницаемыми покрытиями и средней с воздухопроницаемым покрытием, которая составляет большую часть крыла, под воздухопроницаемым покрытием крыла под углом к воздушному потоку посредством жестких составных вогнутых в продольном направлении пластин задней части крыла между спаренными жесткими нервюрами зафиксированы множество тонких мембран с аэродинамическим поперечным профилем, суммарная площадь которых превышает площадь самих крыльев в три и более раз в зависимости от веса пилота, при этом удельный вес аппарата составляет не более 1,250 кг/м2, передняя воздухонепроницаемая часть крыла содержит подвижную относительно нервюр осевую трубу круглого сечения, соединенную с рычагами управления крыльями и элеронами, шарнирно соединенными между собой поперечной перекладиной, на которой установлены педали в форме стремян и шасси, при этом в секторе элеронов, расположенных в концах крыльев, осевая труба имеет прямоугольное сечение, обеспечивающее жесткое сцепление с нервюрами, и соединена с круглой подвижной осевой трубой через переходной фиксирующий узел, крылья закреплены к фюзеляжу шарнирно через подвижные трехлучевые телескопические маховые стержни и упруго посредством центральных, передних и задних резиновых пружин, сила упругости первых в статическом состоянии равна силе тяжести аппарата и приложена к точке центра тяжести, совмещенной с линией центра давления крыльев, при этом задние резиновые пружины соединяют хвостовой стабилизатор с крыльями.
Отличительными признаками заявляемого изобретения являются новая форма выполнения крыльев, а именно состоящая из трех частей: передней и задней с воздухонепроницаемым и средней с воздухопроницаемым покрытиями, наличие новых конструктивных элементов, а именно множества тонких мембран с аэродинамическим профилем вдоль подвижной осевой трубы, наличие новых связей между конструктивными элементами, а именно связь подвижной осевой трубы с рычагами управления крыльями и элеронами, шарнирно соединенными между собой поперечной перекладиной, новая форма закрепления крыльев к фюзеляжу, а именно шарнирно через маховые трехлучевые телескопические стержни и упруго, посредством резиновых пружин.
Наличие множества тонких мембран, выполнение их с аэродинамическим профилем и установка их под углом к воздушному потоку в крыле под воздухопроницаемым покрытием по аналогу парящих птиц позволяет извлекать из потоков воздуха биоаэродинамическую энергию (D), достаточную для обеспечения свободного полета человека. Суммарная площадь данных мембран позволяет довести удельный вес аппарата с пилотом до значений, равных удельному весу самого воздуха (не более 1,250 кг/ м2), что является обязательным условием парящего полета. Следует особо отметить, что подъемная сила крыла, определяемая по Бернулли, в данном случае исполняет роль только вспомогательной силы, так как при обтекании воздушного потока по верхней стороне крыла над воздухопроницаемым покрытием создается зона пониженного давления. При этом создается эффект подсоса воздушного потока, проходящего ниже крыла, в пространство между мембранами, расположенными под углом к потоку. Толщина мембран (пленок) принята предельно малого значения. Передние кромки мембран расположены вдоль потока. Следовательно, предельно малое значение имеет и их лобовое сопротивление. Таким образом, нижний воздушный поток всасывается в пространство между мембранами и, меняя свое направление, отдает часть энергии мембранам. При этом извлекается скрытая до настоящего времени от внимания человека биоаэродинамическая сила - (D), вектор которой направлен вдоль крыла от пилота под углом от 5 до 20 градусов вверх в зависимости от положения крыльев. Суммарная вертикальная составляющая полученной энергии - подъемная сила (С) при режиме парения аппарата равна суммарной силе тяжести аппарата с пилотом (G) и приложена к центру тяжести аппарата (см. фиг.4).
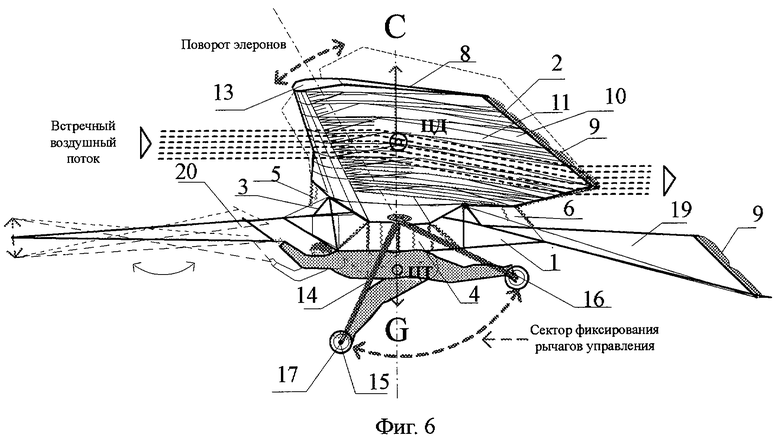
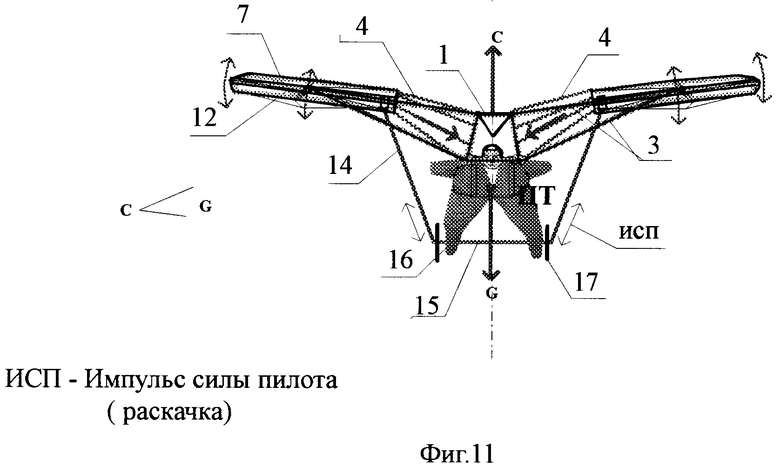
Особенностью настоящего изобретения является также простота и надежность управления элеронами и крыльями по использованию энергии встречного потока воздуха и упруго натянутых центральных, передних и задних пружин для возбуждения махового колебательного процесса. Для этого пилоту требуется прикладывать только импульсы силы ног к педалям (стременам) рычага управления элеронами крыльев в такт собственной частоты упруго натянутых пружин в форме раскачки (см. фиг.6, 10, 11). При этом угол атаки элеронов поворотом осевой трубы крыльев может меняться периодически от положительного до отрицательного значения и обратно (см. фиг.6). При совпадении фазы поворотов элеронов с фазой собственной частоты колебания упругой системы резиновых пружин, которая выступает в роли резонатора, происходит возбуждение колебаний вплоть до резонансных значений (см. фиг.4, 9, 10, 11). При скорости встречного потока от 5 м/с до 12 м/с (разбег или встречный ветер) обеспечивается отрыв аппарата от земли с последующим набором высоты и скорости. Вертикальная составляющая силы упругости центральных пружин в статическом состоянии устанавливается равной суммарной силе тяжести аппарата с пилотом. Точка приложения силы упругости пружин совмещена с центром тяжести аппарата. Дополнительное увеличение подъемной силы крыльев в полете больше сил упругости пружин и обеспечивает набор высоты (см. фиг.4, 10, 11). При маховых движениях крыльев проявляется сильный крутящий момент (М), как одна из составляющей биоаэродинамической силы (D), направленный вперед по курсу полета. Данному крутящему моменту противодействуют в основном задние пружины, горизонтальная составляющая сил упругости которых (Т) направлена вперед по курсу полета. Значение этой силы при полете больше, чем лобовое сопротивление аппарата, что является непременным условием поступательного движения по курсу (см. фиг.5). Передние резиновые пружины в колебательном процессе выполняют дополнительную стабилизирующую роль. Вектор вертикальной составляющей силы упругости передних пружин направлен вверх. При парящем режиме полета пилоту требуется прикладывать ногами небольшие усилия к рычагам управления, достаточные для поддержания равновесия по крену. Осевая труба в секторе элеронов имеет прямоугольное сечение и имеет жесткое сцепление с нервюрами элеронов и представляет с ними единое целое. В секторе парения крыла осевая труба после переходного узла элерона имеет круглое сечение и по отношению к нервюрам данного сектора находится в определенной свободе вращения. Таким образом, поворотом подвижной осевой трубы через рычаги управления элеронами крыльев изменяется геометрия крыла в форме скручивания. При этом у элеронов в концах крыльев меняется, по желанию пилота, угол атаки от положительного до отрицательного и обратно, тем самым, обеспечивается управление аппаратом по крену. Крылья аппарата совершают в воздухе сложную траекторию движения, близкого к овалу, при этом возврат крыльев в верхнее заднее положение происходит укороченным путем. В любом режиме маховых движений управляемость крыла сохраняется, т.е. пилот при необходимости имеет возможность прекратить мах крыльев, свободно переходя в режим парения и наоборот, усилиями ног возобновить режим маховых движений. Таким образом, новые конструктивные признаки заявляемого изобретения обеспечивают условия для свободного, парящего полета человека в воздухе, повышают аэродинамику и управляемость крыльев аппарата, обеспечивают надежность, маневренность и безопасность полета.
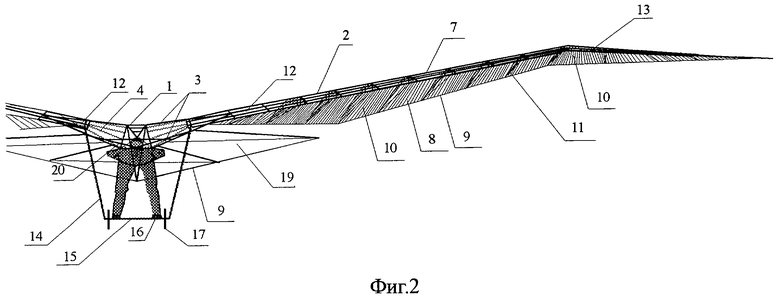
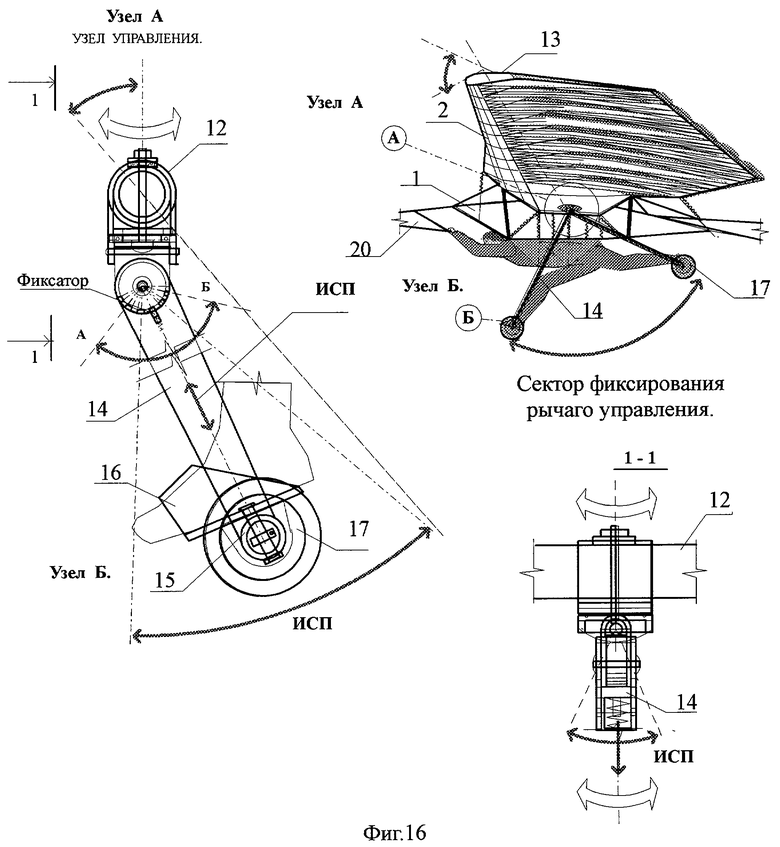
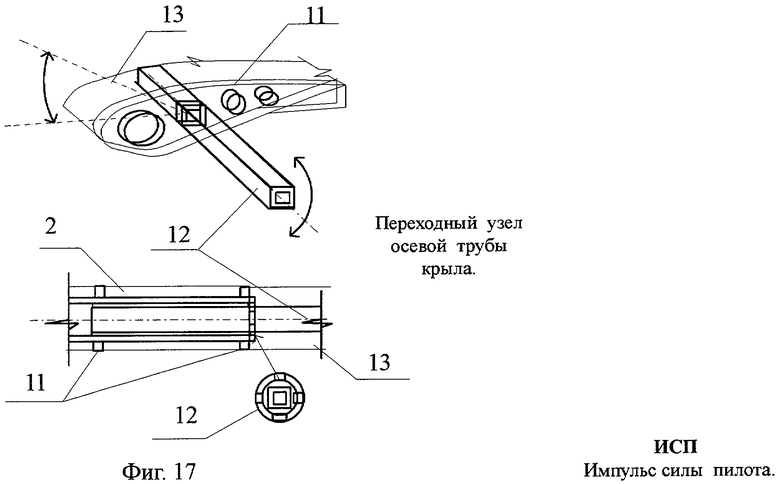
Заявляемое изобретение поясняется чертежами, где на фиг.1 изображена конструкция каркаса аппарата, на фиг.2 - вид аппарата спереди, на фиг.3 - вид аппарата снизу (фрагмент), на фиг.4 - схема маха крыльев по вертикали в воздушном потоке, на фиг.5 - схема движения подвижных частей аппарата по горизонтали в воздушном потоке, на фиг.6 - внешний вид аппарата сбоку и схема движения подвижных частей по вертикали в воздушном потоке, на фиг.7 - поперечный разрез крыла, на фиг.8 - принципиальная схема получения энергии из встречных и восходящих воздушных потоков, на фиг.9 - конструкция центральной части аппарата - резонатора, на фиг.10, 11 - схемы возбуждения резонансных маховых движений крыльев через упругую систему пружин - резонатора, на фиг.12 - трехлучевые маховые телескопические стержни, схемы движения, на фиг.13 - виды каркаса фюзеляжа, на фиг.14 - схемы расположения мембран вдоль осевой трубы и маховые движения крыла (фрагменты), на фиг.15 - фрагмент общего вида мембран, на фиг.16 - схема движения рычагов управления, основные узлы рычагов управления, фиг.17 - принципиальная схема переходного узла осевой трубы.
Биоаэродинамический летательный аппарат с машущими крыльями содержит фюзеляж 1, к которому закреплены крылья 2 шарнирно через подвижные трехлучевые телескопические маховые стержни 3 (см. фиг.12) и упруго посредством центральных 4, передних 5 и задних 6 пружин из резиновых жгутов (см. фиг.9). Сила упругости пружин 4, 5, 6 установлена в статическом состоянии равной силе тяжести аппарата и приложена к точке центра тяжести аппарата, совмещенной с линией центра давления крыльев (см. фиг.4, 5, 6). Крылья 2 аппарата состоят из трех частей: передней 7 и задней с воздухонепроницаемыми покрытиями и средней 8 с воздухопроницаемым покрытием, которая составляет большую часть крыла. Задняя часть крыла состоит из воздухонепроницаемых жестких составных вогнутых в продольном направлении пластин 9. Под воздухопроницаемым покрытием 8 крыла 2 под углом к воздушному потоку зафиксировано множество тонких мембран 10 с поперечным аэродинамическим профилем. Продольная форма мембран 10 соответствует аэродинамической форме крыла 2 (см. фиг.7, 8). Суммарная площадь мембран 10 превышает площадь самих крыльев в 3 и более раз в зависимости от веса пилота. Например, при весе пилота 69,25 кг, суммарная площадь мембран в крыльях составляет 68,9 м2, площадь крыльев в проекции составляет 19,4 м2, а площадь мембран в секторе парения крыльев составляет 55 м2. Пространство (щели) между мембранами 10 открыты снизу, что позволяет встречным и восходящим потокам воздуха свободно проходить между ними (см. фиг.8, 14, 15). Постоянное натянутое состояние мембран с сохранением их профиля в машущих крыльях 2 обеспечивают жесткие вогнутые в продольном направлении составные пластины 9 задней части крыльев и жесткие спаренные нервюры 11. С передней стороны мембраны 10 жестко зафиксированы к воздухонепроницаемому остову крыла 2 составными пластинами и стержнями, не препятствующими скручиванию крыла. Пластины 9 имеют противопикирующий профиль, препятствующий срыву потока с несущих поверхностей аппарата.
Воздухонепроницаемая передняя часть 7 крыла 2 содержит подвижную осевую трубу 12 круглого сечения. В секторе элеронов 13, расположенных на концах крыльев 2, осевая труба 12 имеет прямоугольное сечение, обеспечивающее жесткое сцепление оси с нервюрами элеронов 13, образуя с элеронами единое целое. Осевая труба прямоугольного сечения соединена с осевой трубой круглого сечения через фиксирующий переходной узел (см. фиг.17). К осевым трубам 12 крыльев 2 снизу со стороны пилота через поворотные узлы установлены рычаги управления 14 элеронами и крыльями, шарнирно соединенные между собой на уровне ног пилота поперечной перекладиной 15. На перекладине 15 установлены ножные педали в форме стремян 16, а также шасси 17 (см. фиг.16). В пространстве под воздухонепроницаемым покрытием передней части 7 крыла 2 на осевых трубах круглого сечения установлены свободно, так же, как нервюры 11 сектора парения крыла, профильные пластины 18 из легкого материала (например, пенопласта) (см. фиг.1, 5). Пластины 18 так же, как нервюры 11 в данном секторе не препятствуют скручиванию крыла 2 и сохраняют заданный профиль покрытия крыла при разных режимах управления. В задней части фюзеляжа 1 расположен хвостовой стабилизатор 19, соединенный с крыльями аппарата задними пружинами 6. Такое соединение обеспечивает синхронное движение хвостового стабилизатора 19 вместе с крыльями 2. В передней части фюзеляжа 1 установлен руль 20 высоты и направления (см. фиг.1, 5, 6). В задней части хвостового стабилизатора 19 и руля 20 установлены аналогично крыльям такие же пластины 9, имеющие противопикирующий профиль и исполняющие роль жестких упоров для обеспечения постоянного натяжения обшивки несущих поверхностей аппарата. Пустоты в конструкциях между покрытиями аппарата для сохранения заданного профиля заполняются при необходимости легким пенопластом. В фюзеляже предусмотрено место для укладки спасательного парашюта 21 с системой аварийного отделения от аппарата (см. фиг.13). В обшивку аппарата в соответствии с установленными аэродинамическими формами и чертежами встроены растяжки 22, состоящие из тонких усиленных капроновых лент. На фюзеляже 1 установлены опорные шаровые шарниры 23 трехлучевых маховых стержней 3 (см. фиг.12). Такие же шаровые шарниры 23 установлены по 2 на остове каждого крыла. Таким образом, создается условие для устойчивого притяжения крыльев к фюзеляжу посредством упругого натяжения пружин 4, 5, 6 до необходимых значений и установочного положения крыльев. Трехлучевая телескопическая конструкция маховых стержней 3 имеет по три точки опоры на фюзеляже и обеспечивает в упругом режиме устойчивые, заданные проектом, амплитуды и траектории маховых движений крыльев (см. фиг.4, 5, 9, 10, 11, 12). Руль высоты и направления 20, установленный спереди аппарата, имеет ось вращения, совмещенную с центром давления плоскости руля, что облегчает управление аппаратом в воздушном потоке.
Заявляемое устройство работает следующим образом.
Пилот жестко закрепляется снизу к фюзеляжу 1 посредством креплений в горизонтальном положении. При этом ноги пилота вместе с рычагами управления 14, в зависимости от режима полета, могут принимать любое необходимое зафиксированное положение в секторе до 90 градусов или легко освобождаться от педалей рычагов в момент старта или посадки. Рычаги управления 14 фиксируются или освобождаются от фиксации простым поворотом педалей 16 вокруг поперечных осей на перекладине 15 (см. фиг.16). При старте пилот даже при полном отсутствии встречного ветра может разбежаться до отрыва аппарата от земли, затем легко и быстро вставляет ноги в стремена (педали) 16. Перед стартом рычаги управления 14 переводятся в заднее фиксированное положение, чтобы не мешать свободному разбегу пилота. Далее, энергично воздействуя на рычаги управления 14, пилот обеспечивает возбуждение маховых движений крыльев до необходимых резонансных значений, достаточных для набора высоты и скорости (см. фиг.4, 10, 11). Взлет аппарата осуществляется практически с любого удобного места, при этом необязательно требуется возвышенность. Хвостовой стабилизатор 19 выполняет функцию гашения опрокидывающих моментов при махе крыльев 2, т.к. при этом линия центра давления крыльев смещается от центра тяжести аппарата вперед или назад (см. фиг.5, 6). Пилот при необходимости может посредством рычагов управления 14 остановить мах крыльев, переходя в режим спокойного парения и наоборот, возобновлять режим маховых движений. Усилием рук руль 20 может двигаться вправо или влево, вверх или вниз (см. фиг.5, 6). Таким образом, обеспечиваются маневры по направлению и высоте. Простым поворотом рукоятки руль 20 может быть зафиксирован или освобожден от фиксированного положения. При фиксированном положении руля 20 руки пилота могут быть свободными от управления. Синхронными движениями руля 20 и рычага 14 пилот выполняет маневры по изменению курса полета с допустимым креном аппарата. Обеспечение условий для парящего полета достигается тем, что удельное давление веса пилота - 68,9 кг на мембраны сектора парения площадью 55 м2 составляет всего 1,250 кг/м2, что равняется удельному давлению самого воздуха, а удельный вес всего аппарата с пилотом при общей площади поверхностей в 101 м2 при общем весе 126,4 кг также равняется удельному давлению воздуха. Поперечная перекладина 15 с педалями, соединенная с рычагами управления 14 шарнирно, позволяет управлять элеронами асинхронно, таким образом обеспечивается управление креном аппарата. Шасси 17 обеспечивают удобную посадку на землю. После полной остановки аппарата на земле пилот легко освобождает ноги от педалей, обеспечивая при этом равновесие аппарата.
Для создания данного изобретения могут быть использованы известные материалы и ткани, которые применяются в конструкциях современных дельтапланов, парапланов и парашютов. В конструкциях каркаса предусмотрены легкие и прочные трубы из легких сплавов и (или) трубы по спецзаказу из композитных материалов. Для жесткости каркаса фюзеляжа 1 и нервюр 11 используются тонкие алюминиевые листы толщиной до 1 мм. Для растяжек 22 применяются усиленные тонкие капроновые ленты шириной не более 2 см, вшитые в обшивку 7, 8 аппарата. Необходимая сила упругости пружин 4, 5, 6 достигается на стенде путем подбора в период центровки аппарата из резиновых жгутов, применяемых в авиационной технике. Натянутые пружины покрываются сверху легким упругим покрытием, обеспечивающим подвижность и обтекаемость центральной части аппарата. Биоаэродинамические мембраны 10 состоят из специальных легких армированных тонкими волокнами пленок, туго натянутых по форме аэродинамического профиля. Биоаэродинамические мембраны могут быть изготовлены также из легких, тонких и прочных пластинчатых материалов при соответствии их весовым показателям. Для более устойчивого сохранения полетных профилей в динамичных режимах в крыльях 2 встроены легкие пенопластовые пластинчатые профили 18, не препятствующие скручиванию крыльев. Для сохранения заданных полетных профилей аппарата пустоты между обшивками руля, элеронов и фюзеляжа заполняются пенопластовым материалом. Все шарнирные соединения и детали узлов вращения предусматривается выполнить из легких титановых сплавов с высокой степенью точности с наименьшими потерями по трению.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| МАХОЛЕТ | 2011 |
|
RU2467923C1 |
| Моторный орнитоптер | 1959 |
|
SU131618A1 |
| ИНДИВИДУАЛЬНОЕ СКОРОСТНОЕ ПЛАВАТЕЛЬНОЕ СРЕДСТВО | 2009 |
|
RU2399399C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1992 |
|
RU2097267C1 |











Изобретение относится к авиационной технике, в частности к летательным аппаратам с машущими крыльями, и предназначено для обеспечения свободного парящего полета человека в восходящих и встречных потоках воздуха. Летательный аппарат содержит фюзеляж, на котором шарнирно закреплены крылья, между которыми прикреплены резиновые пружины, подвесную систему пилота, рулевое управление и хвостовой стабилизатор. Крылья аппарата состоят из трех частей: передней и задней с воздухонепроницаемыми покрытиями и средней с воздухопроницаемым покрытием. Под воздухопроницаемым покрытием крыла под углом к воздушному потоку посредством жестких составных вогнутых в продольном направлении пластин между спаренными жесткими нервюрами зафиксированы тонкие мембраны с аэродинамическим поперечным профилем. Передняя воздухонепроницаемая часть крыла содержит подвижную относительно нервюр осевую трубу, соединенную через узел крепления с рычагами управления крыльями и элеронами, шарнирно связанными между собой снизу поперечной перекладиной, на которой установлены педали и шасси. В секторе элеронов осевая труба соединена с подвижной осевой трубой через фиксирующий переходной узел. Крылья закреплены к фюзеляжу шарнирно через подвижные трехлучевые телескопические маховые стержни и упруго посредством центральных, передних и задних резиновых пружин. Достигается улучшение аэродинамики аппарата и повышение безопасности полета. 2 з.п. ф-лы, 17 ил.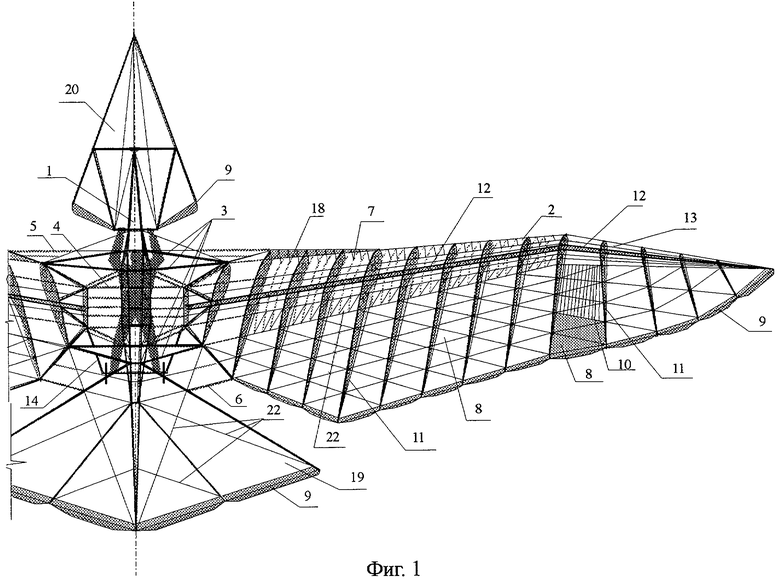
1. Биоаэродинамический летательный аппарат с машущими крыльями, содержащий фюзеляж, на котором шарнирно закреплены крылья, между которыми прикреплены резиновые пружины, подвесную систему пилота, рулевое управление, хвостовой стабилизатор, отличающийся тем, что крылья аппарата состоят из трех частей - передней и задней с воздухонепроницаемыми покрытиями и средней с воздухопроницаемым покрытием, которая составляет большую часть крыла, под воздухопроницаемым покрытием крыла под углом к воздушному потоку посредством жестких составных вогнутых в продольном направлении пластин задней части крыла между спаренными жесткими нервюрами зафиксированы тонкие мембраны с аэродинамическим поперечным профилем, суммарная площадь которых превышает площадь самих крыльев в три и более раз в зависимости от веса пилота, при этом удельный вес аппарата составляет не более 1,250 кг/м3, передняя воздухонепроницаемая часть крыла содержит подвижную относительно нервюр осевую трубу круглого сечения, соединенную через узел крепления с рычагами управления крыльями и элеронами, шарнирно связанными между собой снизу поперечной перекладиной, на которой установлены педали в форме стремян и шасси, при этом в секторе элеронов, расположенных в концах крыльев, осевая труба имеет прямоугольное сечение, обеспечивающее жесткое сцепление с нервюрами, и соединена с подвижной осевой трубой круглого сечения через фиксирующий переходной узел, крылья закреплены к фюзеляжу шарнирно через подвижные трехлучевые телескопические маховые стержни и упруго посредством центральных, передних и задних резиновых пружин, сила упругости первых в статическом состоянии равна силе тяжести аппарата и приложена к точке центра тяжести, совмещенной с линией центра давления крыльев, при этом задние пружины соединяют хвостовой стабилизатор с крыльями.
2. Аппарат по п.1, отличающийся тем, что продольная форма мембран соответствует аэродинамической форме крыла.
3. Аппарат по п.1, отличающийся тем, что руль высоты и направления, установленный спереди аппарата, имеет ось вращения, совмещенную с центром давления плоскости руля.
| ДЕЛЬТАМАХОЛЕТ | 2004 |
|
RU2263610C1 |
| Пакетный переключатель | 1949 |
|
SU80641A1 |
| 0 |
|
SU187533A1 | |
| JP 2006341623 A, 21.12.2006. | |||

