ИрОДМСТпм Ji:i;)UpOTCHlI} ЯВЛНСТСН Л11С.Т(;ипдакицщ мохнни: для листовых ротаHiiuMHijix м.члшн, выполненной jj-виде рычагов с .в;1тами, закрепленными на яилу, н Л нод П1маемом над нечатным цилиндром приводными тягами.
В листовых ротационяых ма ллшах, и скпцих цилиндры с высоким коэффициентом И1;Н;1Ль; оиа)1Ия их рабочей поверхности, т. е. имеющих малые углы выемки нерабочей .асти, возникает необходимость при возврате рычага с захватами из положения верхнего выстия к. накладному столу изменять радиус качания рычага, чтобы по::ледний мог И1 оходить над 1)абочей )xHocrj i; цилиндра, не задевая ее. Изменение 1)адиуга качаи1гя осуществляется обычно или доиолнит(льн)1м иаклоиом головки рычага, несущей «ал с захватами, или цод1(мом их рычажным механизмам че1)ез двойной вал.
В ие1)В1)м -глучае увели1И)аются динамические нагрузки, возника) в «еха} изм; а во втором случае кложность конструкции затрудняет зксплуатацию Мехннизма.
()i:ic,i,iBai; ib i ли1тоиода1ои1ий механизм yinpaiiiier эти Недостатки и улучниет условия не|)едачи листо.
Особенность его заключается в том, что в нем, с цел)) ооесие.чеиин согласованности г.абнты залватов и печатного цилиидра, иривод рычагов с зах1 атами выполнен к виде соиснп скренле}1}П)о с, печатным цилинд1л).м кулачжа, вза1гмодейст у101цего через ролнк / толкателем, соединен.чым носредсгвом системы И ;1рнирно с «1заииых ; )ычагами, слуи;а.щими для ириподнима)1Ия .
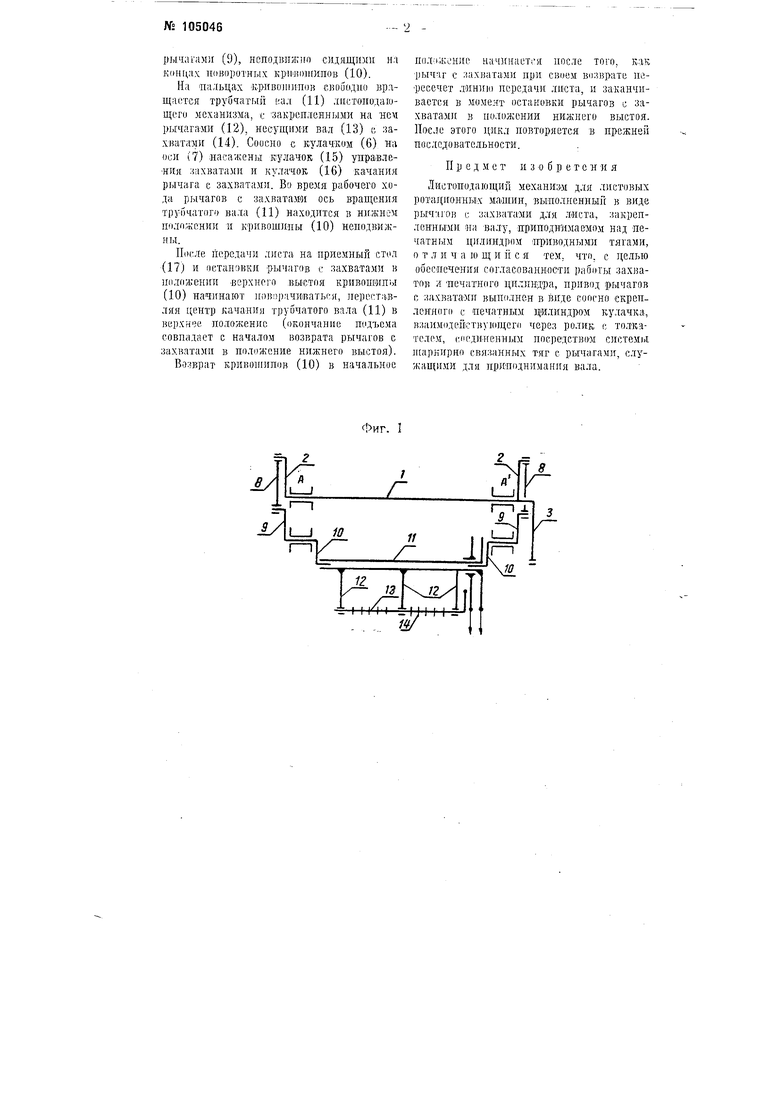
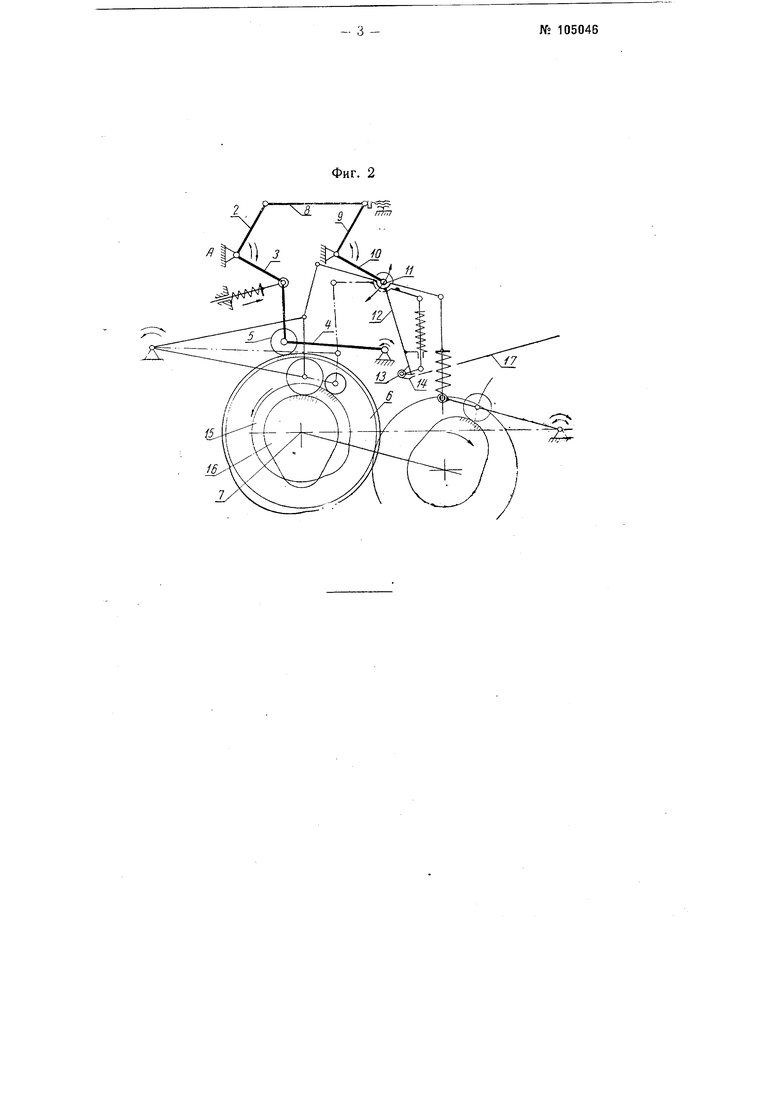
Нч фиг. 1 схематичег/ки изображен механизма в гпане; Hii фиг. 2 - кинематическая схема М1 ханизма.
На вал) (), ироходящем поперек листовой )отационной Мамгины и точках (А) и (А закреплешл рыча1и (2) и рычаг (;), соед||нен гый г,ерьгой с качающимся толкат1 д;м (4). и:мeloи им ролик (5), i3aiiмодействующи с |)1а. кулачком (G), установЛ1И111,гм на оси (7) иечатного } плиидра.
(2) связан, через серьги (8) с
рычагами (9), неподвижно с) H.I концах поноротных крищошипов (10).
На пальцах «-ривоишпов глооодио вращается трубчатый кал (11) листгашдающсго механизма, с закрепленными на нем рычагами (12), ниеущими вал (13) с захватами (14). Соосно с кулачком (6) ни «си (7) насажен), кулачок (15) управления .чахватами и кулачок (16) качания рычага с захватами. Во время рабочего хода рычагов с захватами ось вращения трубчатого вала (11) находится в нижнем положении и кривошипы (10) непод)шжны.
После передачи листа на приемный стол (17) и остановки рычагов с захватами в положении -BopxHei-o лпЛСТоя кривоцшн.л (10) начинают )ачи1вать(я, ие1)е(:талляя центр качания трубчатого вала (11) в верхнее положение (окончание подъема совпадает с началом возврата рычагов с захватами в положение нижнего выстой).
Возврат кривонпгаов (10) в начальное
поло .кение начинается иосле того, как рьгч-ir с захватами при своем возврате по,рееечет линию передачи листа, и заканчивается в .мо.чеят остановки рычагов с захватами в иоложении нижнего выстоя. lloc.je этого цикл повторяется в прежней последовательности..
Предмет изобретения
Листоподающий механизм для листовых ротационных машин, выполненный в вида рычагов с захватами для листа, закрепленньгми на валу, приподнимаемом над печатным цилиндром приводными тягами, о т л и ч а К) щ и и с я тем, что, с целью обеспечения согласованности работы захватов л печатного цплпндра, привод рычагов с захватами выполнен в виде соосно скрепленного с печатным цилиндром кулачка, взаимодействующего через ролик с то.ткателем, («единенным иосредством систем 1 1иарнирно связанных тяг с рьгчатами, служащими для приподнимания вала.