СП
о а а
о:
2.Гамма-томограф tio п. 1, отличающийся тем, что блок формирования содержит пог следовательно соединенные нормирователь, линейный пропускатель и схему коррекции
и последовательно соединенные второй нормирователь и амплитудный анализатор, причем один из выходов анализатора подключен к второму входу линейного пропускателя, а второй выход анализатора - к второму входу схемы коррекции.
3.Гамма-томограф по п. 1, отличающийся тем, что блок селекции поперечных слоев
содержит выравнивающее устройство, параллельно соединенные аналоговый коммутатор, регистр номера датчика и схему ИЛИ, многоканальный амплитудный селектор, регистр номера слоя и схему И, при этом выход аналогового коммутатора соединен с входом многоканального амплитудного селектора, выход которого подключен к входу регистра номера слоя, первый вход схемы И - ft выходу схемы ИЛИ, а второй вход схемы Ик выходу задатчика углового положения рамы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гамма-камера | 1976 |
|
SU669511A1 |
| Поперечный гамма-томограф | 1982 |
|
SU1063391A2 |
| Поперечный гамма-томограф | 1980 |
|
SU955905A1 |
| Сцинтилляционная гамма-камера | 1976 |
|
SU671519A1 |
| Гамма-камера | 1977 |
|
SU669512A1 |
| Гамма-камера | 1977 |
|
SU753427A1 |
| Гамма-камера с коррекцией неоднородности изображения | 1984 |
|
SU1340750A1 |
| Электронный плотномер | 1980 |
|
SU911971A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСПРЕДЕЛЕНИЯ РАДИОАКТИВНОГО ПРЕПАРАТА ВНУТРИ ИССЛЕДУЕМОГО ОБЪЕКТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2006 |
|
RU2349932C2 |
| ДЕТЕКТОР ДЛЯ РЕГИСТРАЦИИ НЕЙТРОНОВ И ГАММА-ИЗЛУЧЕНИЯ | 1998 |
|
RU2158011C2 |
ПОПЕРЕЧНЫЙ ГАММА-ТОМОГРАФ, содержащий поворотную раму с подвижно установленными на ней коллимированными датчиками излучения, механизм перемещения рамы со схемой управления и задатчиком углового положения рамы, механизм перемещения датчиков со схемой управления, интерфейс и электроннр-вы- ,. числительную машину, отличающийся тем, что, с целью уменьшения времени исследования пациента путем одновременного сбора информации f нескольких слоев тела пациента, он дополнительно содержит связанные с датчиками блоки формирования координатных сигналов и блок селекции попереч ных слоев, один из входов которого подключен к задачику углового положения рамы, остальные входы подключены к выxoдaN блоков формирования, а выходы соединены с интерфейсом, при этом каждый датчик содержит защитный экран, линейно-фокусирующий коллиматор, линейный детекторгамма-излучения, световод, фотоумножители, предусилители, формироваУель координатных сигналов и формирователь энергетических сигналов, а ось детектора перпендикулярна томографической плоскости (Л рамы.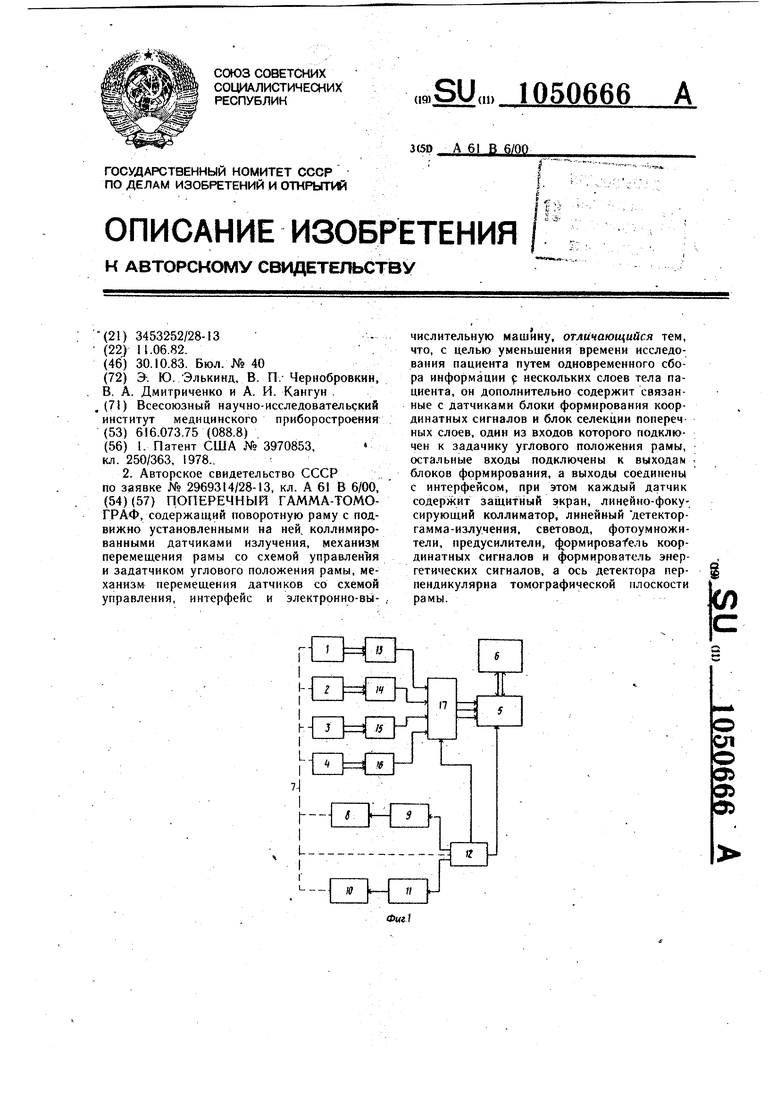
Изобретение относится к медицинской технике, а именно к устройствам для гамма- томографии, позволяющим с помощью вводимых пациенту радионуклидов определять форму, размеры, местоположение внутренних органов и систем, а также вявлять наличие патологических очагов.
Известен гамма-томограф, содержащий детекторную систему, опорную раму, амплитудный анализатор, интерфейс, ЭВМ, механизм вращения опорной рамы с блоком управления. Детекторная система выполнена в аиде четырех детекторных головок, каждая из которых содержит восемь прямолинейно расположенных коллимированных сцинтилляционных детекторов, оси которых параллельны и лежат в исследуемой попереч ной плоскости (.
Недостатком этого прибора является то, -что поскольку детекторы расположены в одной поперечной плоскости за один цикл исследования собирается информация только из одного слоя и, следовательно, время, необходимое для получения информации со всего исследуемого объема, занимающего несколько слоев, является чрезмерно большим. Другим недостатком указанного прибора является то, что поскольку детекторы расположены прямолинейно, в тангенциальном, относительно объекта направлении, рас- стояние между объектом и апертурой детекторов является непостоянным. В силу этого эффективность детектирования излучения ограничена, а пространственное разрешение недостаточно, что предопределяет низкое качество томографического изобретения. Наиболее близким к изобретению по технической сущности является поперечный гамма-томограф, содержащий поворотную раму с подвижно установленными на ней коллимированными датчиками излучения, механизм перемещения рамы со схемой управления и задачиком углового положения рамы, механизм перемещения датчиков со
5 схемой управления, интерфейс и электронновычислительную машину 2., Недостатком известного гамма-томографа является то, что поскольку детекторы рас положены в одной поперечной плоскости за
Q один цикл сканирования собирается информация только из одного поперечного слоя и, следовательно, время, необходимое для получения информации со всего исследуемого органа, занимающего несколько слоев, яв ляется чрезмерно большим.
S Цель изобретения - уменьщение времени исследования пациента путем одновременного сбора информации с нескольких слоев тела пациента;
Поставленная цель достигается тем, что поперечный гамма-томограф, содержащий
поворотную раму с подвижно установле.нными на ней коллимированными датчиками излучения, механизм перемещения рамы со схемой управления и задатчиком углового положения рамы, механизм перемещения
5 чиков со схемой управления, интерфейс и электронно-вычислительную мащину, дополнительно содержит связанные с датчиками блоки формирования координатных сигна лов и блок селекции поперечных слоев, один из входов которого подключен к задатчику
0 углового положения рамы, остальные входы подключены к выходам блоков формирования, а выходы соединены с интерфейсом, при этом каждый датчик содержит защитный экран, линейно-фокусируюц ин коллиматор, линейный детектор гамма-излучения, световод, фотоумножители, предусилители, формирователь координатных сигналов и формирователь энергетических сигналов, а ось детектора перпендикулярна томографичес-, кой плоскости рамы.
Блок формирования может содержать последовательно соединенные нормировагель, линейный пропускатель и схему коррекц и и последпвательно соединенные второй нормирователь и амплитудный анализатор, причем один из выходов анализатора подключен к .второму входу линейного пропускателя, а второй выход анализатора - к второму входу схемы коррекции.
Блок селекции поперечных слоев может содержать выравнивающее устройство, параллельно соединенные аналоговый коммутатор, регистр номера датчика и схему ИЛИ, многоканальньт амплитудный селектор, регистр Hohiepa слоя и схему И, при этом выход аналогового коммутатора соединен с входом многоканального амплитудного селектора, выход которого .Подключен-к входу регистра номера слоя, первый вход схемы И - к выходу схемы ИЛИ, а второй вход схемы И - к выходу задатчика углового положения рамы..
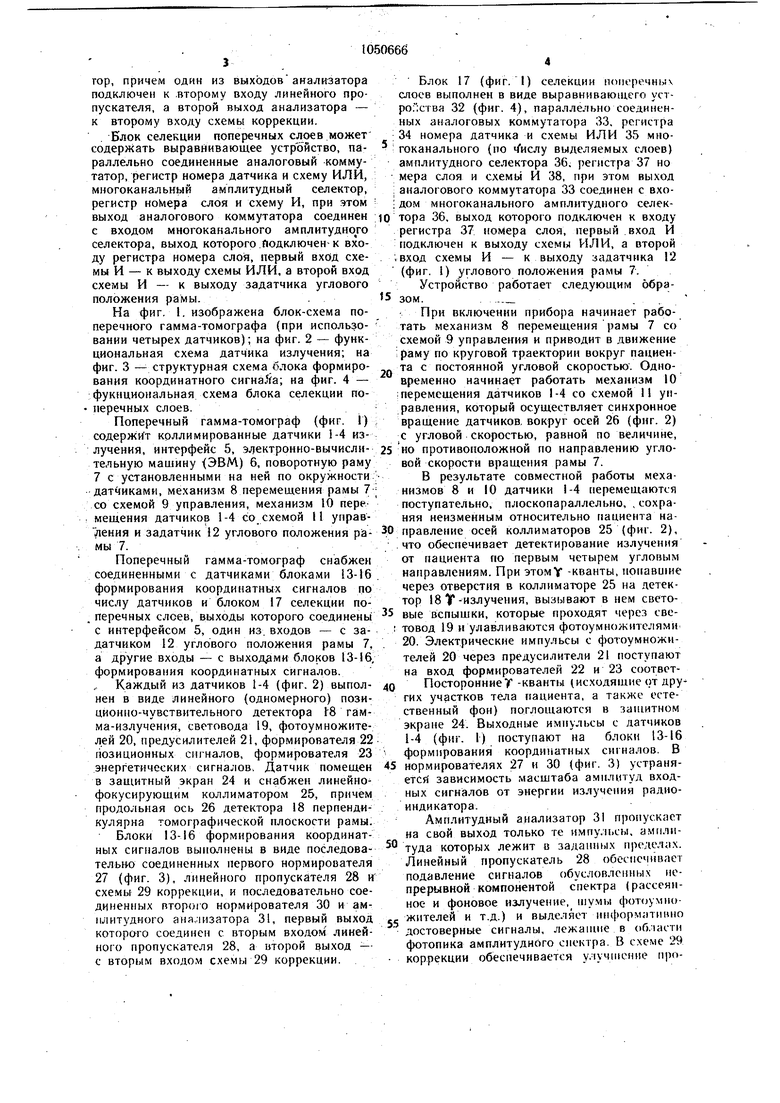
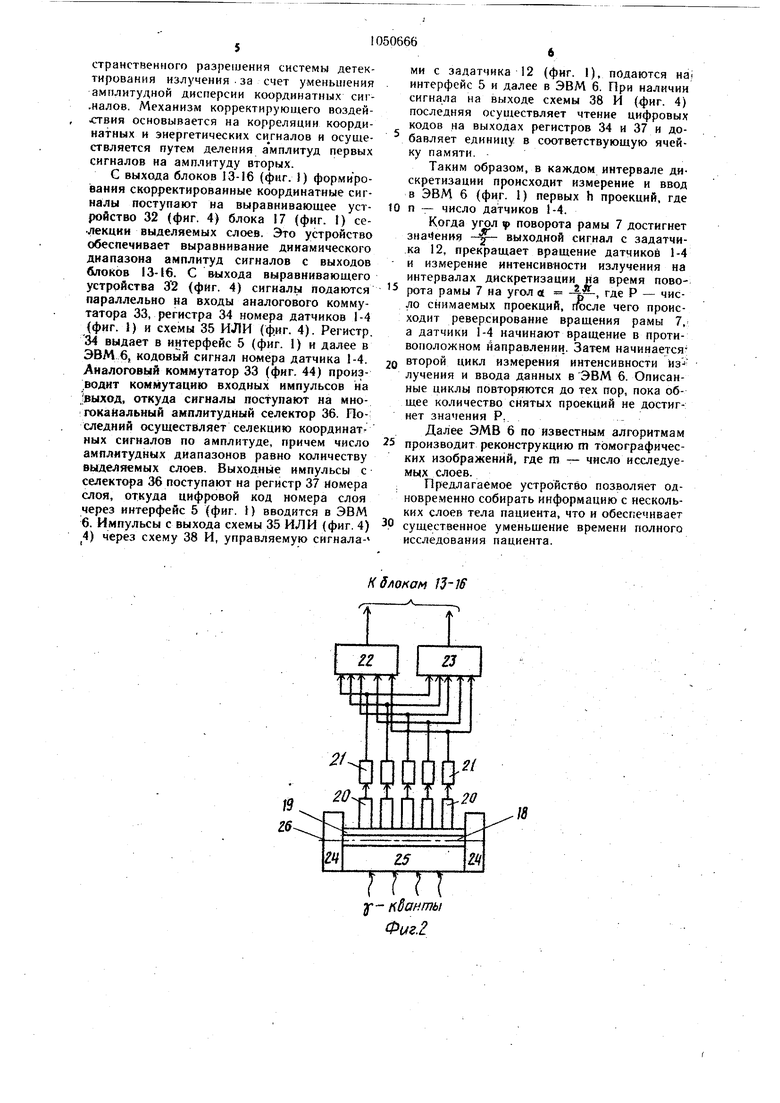
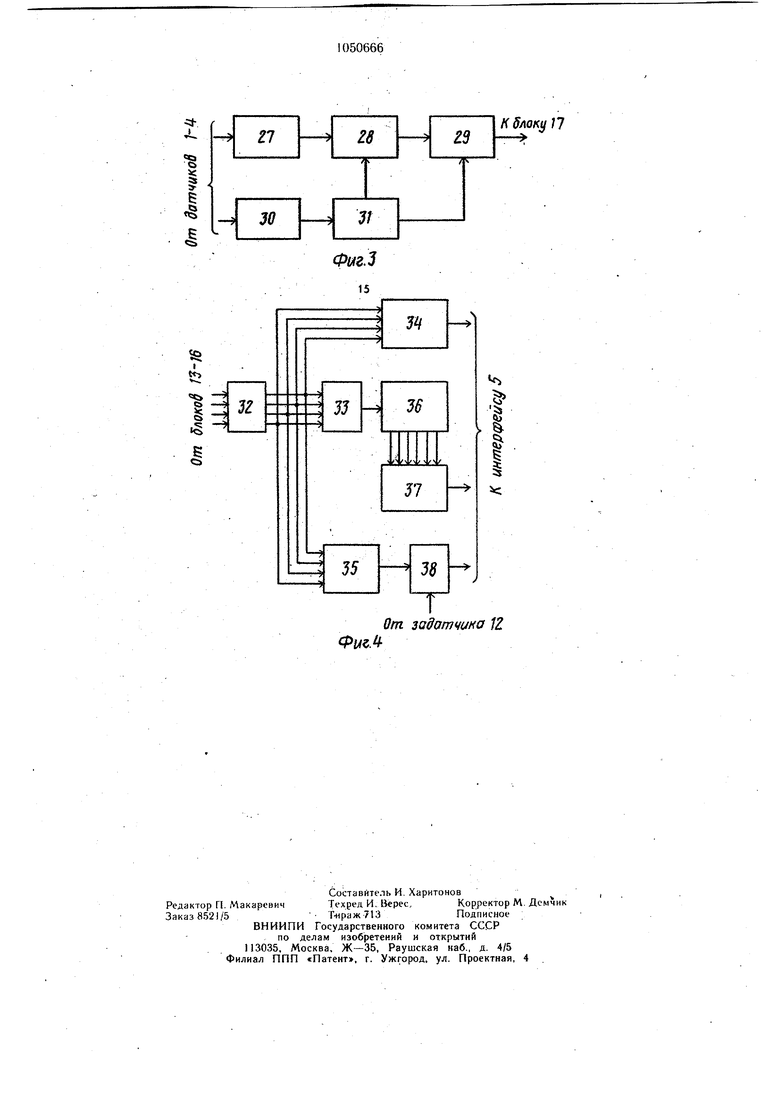
На фиг. 1. изображена блок-схема поперечного гамма-томографа (при использовании четырех датчиков); на фиг. 2 - функциональная схема датчика излучения; на фиг. 3 - структурная схема блока формирования координатного сигна5га; на фиг. 4 - :фукнциональная схема блока селекции поперечных слоев.
Поперечный гамма-томограф (фиг. 1) содержит коллимированные датчики 1-4 излучения, интерфейс 5, электронно-вычислительную машину ЭВМ) 6, поворотную раму 7 с установленными на ней по окружности датчиками, механизм 8 перемещения рамы 7 со схемой 9 управления, механизм 10 перемещения датчиков 1-4 со схемой 11 управления и задатчик 12 углового положения рамы 7.
Поперечный гамма-томограф снабжен соединенными с датчиками блоками 13-16 формирования координатных сигналов по числу датчиков и блоком 17 селекции по, перечных слоев, выходы которого соединены с интерфейсом 5, один из. входов - с задатчиком 12 углового положения рамы 7, а другие входы - с выходами блоков 13-16, формирования координатных сигналов.
Каждый из датчиков 1-4 (фиг. 2) выполнен в виде линейного (одномерного) позиционио-чувствительного детектора IS гамма-излучения, световода 19, фотоумножителей 20, предусилителей 21, формирователя 22 позиционных сигналов, формирователя 23 энергетических сигналов. Датчик помещен в защитный экран 24 и снабжен линейнофокусирующим коллиматором 25, причем продольная ось 26 детектора 18 перпендикулярна томографической плоскости рамы.
Блоки 13-16 формирования координатных сигналов выполнены в виде последовательно соединенных первого нормирователя 27 (фиг. 3), линейного пропускателя 28 и схемы 29 коррекции, и последовательно соединенных второго нормирователя 30 и ам(ичитудного ана.;1изатора 31, первый выход которого соединен с вторым входом линейного пропускателя 28, а второй выход - с вторым входом схемы 29 коррекции.
Блок 17 (фиг. 1) селекции пош-речных слоев выполнен в виде выравнивающего устро: :ства 32 (фиг. 4), параллельно соединенных аналоговых коммутатора 33. регистра 34 номера датчика и схемы ИЛИ 35 .многоканального (по Мислу выделяемых слоев) амплитудного селектора 36, регистра 37 но мера слоя и схемЫ И 38, при этом выход аналогового коммутатора 33 соединен с входом многоканального амплитудного селектора 36, выход которого подключен к входу регистра 37 номера слоя, первый .вход И подключен к выходу схемы ИЛИ, а второй
.вход схемы И - к В1з1ходу задатчика 12 (фиг. 1) углового положения рамы 7.
Устройство работает следующим образом.
: При включении прибора начинает работать механизм 8 перемещения рамы 7 со схемой 9 управления и приводит в .движение
; раму по круговой траектории вокруг пациента с постоянной угловой скоростью. Одновременно начинает работать механизм 10
;перемещения датчиков 1-4 со схемой И управления, который осуществляет синхронное вращение датчиков, вокруг осей 26 (фиг. 2) с угловой скоростью, равной по величине, но противоположной по направлению угловой скорости вращения рамы 7.
В результате совместной работы механизмов 8 и 10 датчики 1-4 перемещаются поступательно, плоскопараллельно, .сохраняя неизменным относительно пациента напpaвлeflиe осей коллиматоров 25 (фиг. 2),
.что обеспечивает детектирование излучения от пациента по первым четырем угловым направлениям. При этому -кванты, попавшие через отверстия в коллиматоре 25 на детектор 18 Т-излучения, вызывают в нем световые вспышки, которые проходят через световод 19 и улавливаются фотоумножителями 20. Электрические импульсы с фотоумножителей 20 через предусилители 21 поступают на вход формирователей 22 и 23 соответПосторонниеУ -кванты i исходящие от других участков тела пациента, а также естественный фон) поглощаются в защитном экране 24. Выходные импульсы с датчиков 1-4 (фиг. I) поступают на блоки 13-16 формирования координатных сигналов. В нормирователях 27 и 30 (фиг. 3) устраняется зависимость масштаба амплитуд входных сигналов от энергии излучения радиоиндикатора.
Амплитудный анализатор 31 пропускает на свой выход только те импу.;1ьсы, амплитуда которых лежит в заданных предел 1х. Линейный пропускатель 28 обеспечивает подавление сигналов обусловлонны.х непрерывной компонентой спектра (рассеянное и фоновое излучение, шумы фотоумножителей и т.д.) и выделяет нпформлтинно достоверные сигналы, лежащие в ofviacTM фотопика амплитудного спектра. В схеме 29 коррекции обеспечивается улучшение пространствениого разрешения системы детектирования излучения . за счет уменьшения амплитудной дисперсии координатных сиг.налое. Механизм корректирующего воздействия основывается на корреляции координатных и энергетических си/налов и осуществляется путем деления амплитуд первых сигналов на амплитуду вторых.
С выхода блоков 13-16 (фиг. 1) формирования скорректированные координатные сигналы поступают на выравнивающее устройство 32 (фиг. 4) блока 17 (фиг. 1) седекции выделяемых слоев. Это устройство обеспечивает выравнивание динамического диапазона амплитуд сигналов с выходов блоков 13-16. С выхода выравнивающего устройства 32 (фиг. 4) сигналы подаются параллельно на входы аналогового коммутатора 33, регистра 34 номера датчиков 1-4 (фиг. 1) и схемы 35 ИЛИ (ф.иг. 4). Регистр. 34 выдает в интерфейс 5 (фиг. 1) и далее в ЭВМ 6, кодовый сигнал номера датчика 1-4. Аналоговый коммутатор 33 (фиг. 44) производит коммутацию входных импульсов на Ьыход, откуда сигналы поступают на многоканальный амплитудный селектор 36. Последний осуществляет селекцию координат ных сигналов по амплитуде, причем число амплитудных диапазонов равно количеству выделяемых слоев. Выходные импульсы с селектора 36 поступают на регистр 37 Номера слоя, откуда цифровой код номера слоя через интерфейс 5 (фиг. I) вводится в ЭВМ 6. Импульсы с выхода схемы 35 ИЛИ (фиг. 4) 4) через схему 38 И, управляемую сигнала-
ми с задатчика 12 (фиг. I), подаются на интерфейс 5 и далее в ЭВМ 6. При наличии сигнала на выходе схемы 38 И (фиг. 4) последняя осуществляет чтение цифровых кодов на выходах регистров 34 и 37 и добавляет единицу в соответствующую ячейку памяти. Таким образом, в каждом интервале дискретизации происходит измерение и ввод в ЭВМ 6 (фиг. 1) первых h проекций, где 0 п - число датчиков 1-4.
Когда угол поворота рамы 7 достигнет зна 1ения - выходной сигнал с задатчика 12, прекращает вращение датчиков 1-4 и измерение интенсивности излучения на интервалах дискретизации на время пово рота рамы 7 на угол л -%-, где Р - число снимаемых проекций, ггосле чего происходит реверсирование вращения рамы 7, а датчики 1-4 начинают вращение в противоположном направлении.. Затем начинается Q второй цикл измерения интенсивности излучения и ввода данных в ЭВМ 6. Описанные циклы повторяются до тех пор, пока общее количество снятых проекций не достигнет значения Р,
Далее ЭМВ 6 по известным алгоритмам 5 производит реконструкцию m томографических изображений, где m - число исследуемых слоев.
Предлагаемое устройство позволяет одновре.менно собирать информацию с нескольких слоев тела пациента, что и обеспечивает существенное уменьщение времени полного исследования пациента.
К5локуЛ
ФиъЛ
От задатчина 7Z
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3970853, кл | |||
| Катодное реле | 1921 |
|
SU250A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 2969314/28-13, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
