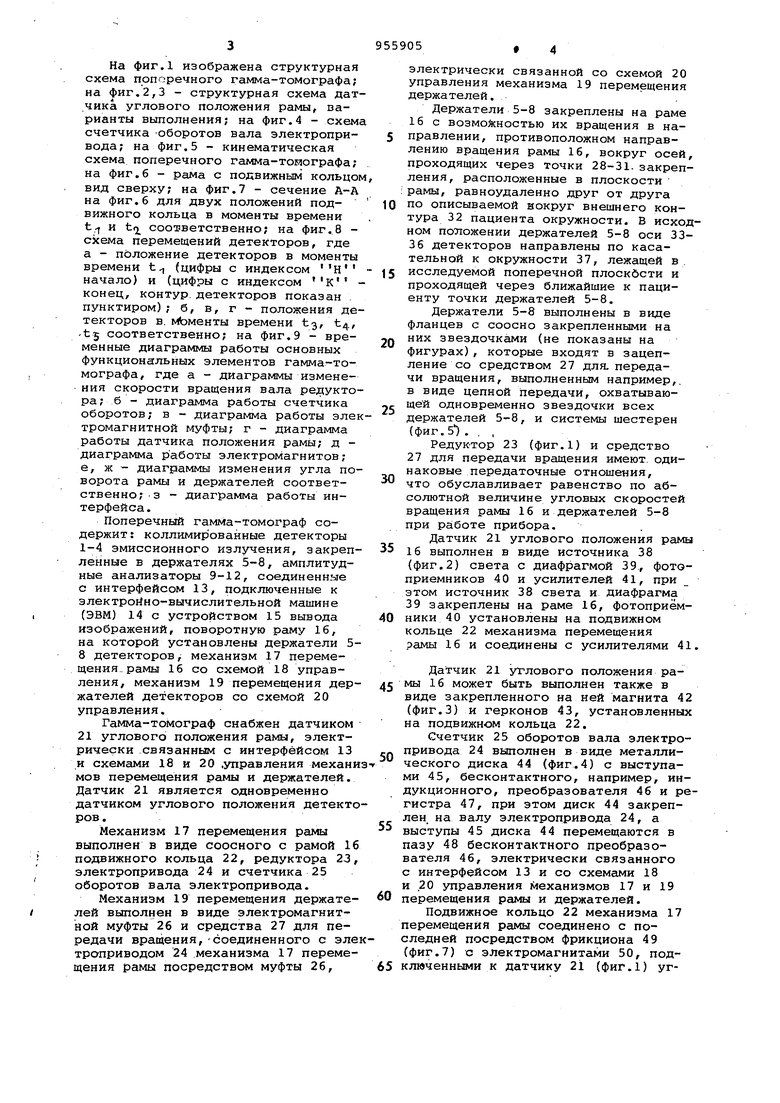
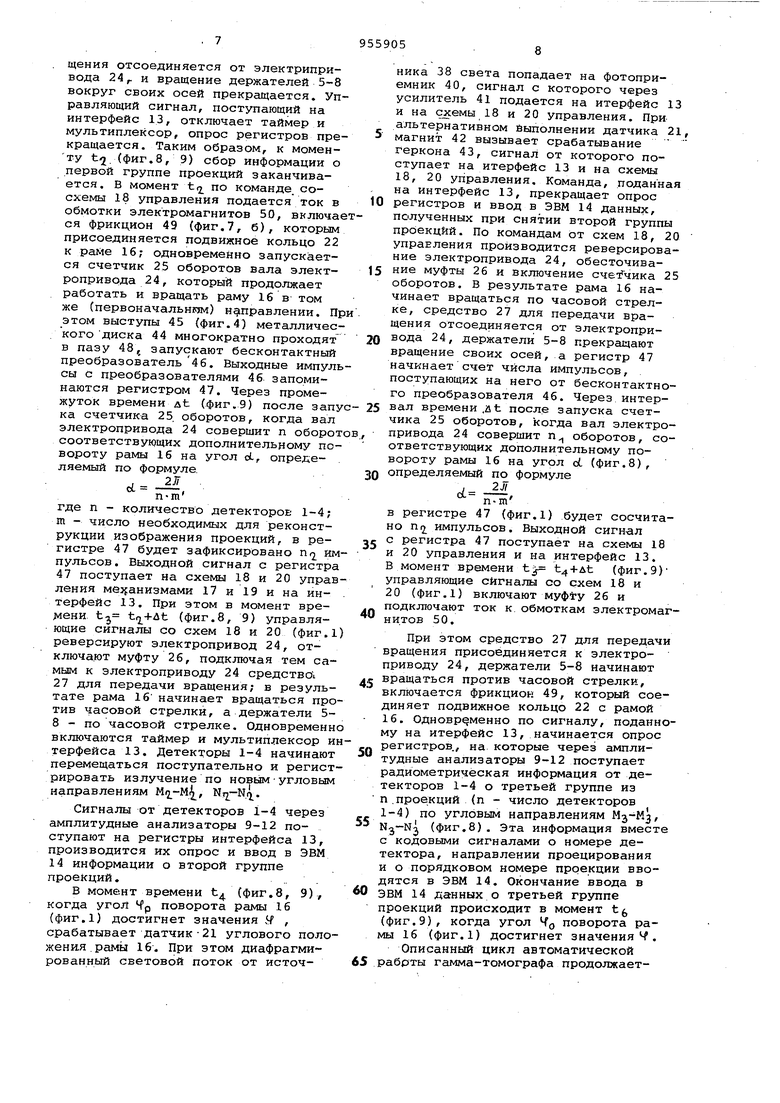
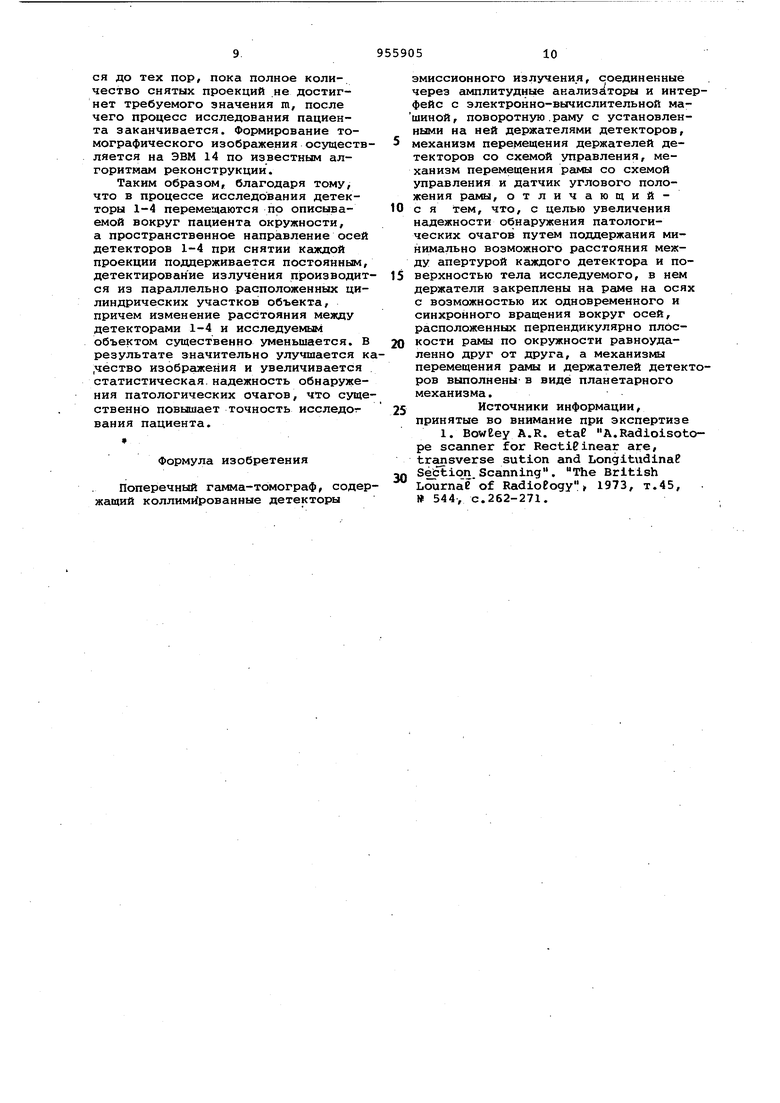
На фиг.1 изображена структурная схема поперечного гамма-томографа; на фиг.2,3 - структурная схема дат .чика углового положения рамы, варианты выполнения; на фиг.4 - схем счетчика -оборотов вала электропривода; на фиг.5 - кинематическая схема поперечного гамма-тонографа; на фиг.б - рама с подвижным кольцо вид сверху; на фиг.7 - сечение А-А на фиг.6 для двух положений подвижного кольца в моменты времени t-f и tr соответственно; на фиг. 8 схема перемещений детекторов, где а - положение детекторов в моменты времени t (цифры с индексом Н начало) и (цифры с индексом К конец, контур, детекторов показан . пунктиром); б, в, г - положения де текторов в. МЬменты времени t, t4, -tj соответственно; на фиг.9 - временные диаграммы работы основных функциональных элементов гамма-томографа, где а - диаграммы изменения скорости вращения вала редукто ра; б - диаграмма работы счетчика оборотов; в - Диаграмма работы эле тромагнитной муфты; г - диаграмма работы датчика положения рамы; д диаграмма работы электромагнитов; е, ж - диаграммы изменения угла по ворота рамы и держателей соответственно; -3 - диаграмма работы интерфейса. Поперечный гамма-томограф содержит: коллимированные детекторы 1-4 эмиссионного излучения, закреп ленные в держателях 5-8, амплитудные анализаторы 9-12, соединенные с интерфейсом 13, подключенные к электронно-вычислительной машине (ЭВМ) 14 с устройством 15 вывода изображений, поворотную раму 16, на которой установлены держатели 5 8 детекторов, механизм 17 перемещения, рамы 16 со схемой 18 управления, механизм 19 перемещения дер жателей детекторов со схемой 20 управления. Гамма-томограф снабжен датчиком 21 углового положения рамы, электрически связанным с интерфейсом 13 и схемами 18 и 20 .управления механи мов перемещения рамы и держателей. Датчик 21 является одновременно датчиком углового положения детект ров. Механизм 17 перемещения рамы выполнен в виде соосного с рамой 1 подвижного кольца 22, редуктора 23 электропривода 24 и счетчика 25 оборотов вала электропривода. Механизм 19 перемещения держателей выполнен в виде электромагнитной муфты 26 и средства 27 для передачи вращения,-соединенного с эле троприводом 24 механизма 17 переме щения рамы посредством муфты 26, электрически связанной со схемой 20 управления механизма 19 перемещения держателей.. Держатели 5-8 закреплены на раме 16 с возможностью их вращения в направлении, противоположном направлению вращения рамы 16, вокруг осей, проходящих через точки 28-31. закрепления, расположенные в плоскости рамы, равноудаленно друг от друга по описываемой вокруг внешнего контура 32 пациента окружности. В исходном положении держателей 5-8 оси 3336 детекторов направлены по касательной к окружности 37, лежащей в . исследуемой поперечной плоскбсти и проходящей через ближайшие к пациенту точки держателей 5-8. Держатели 5-8 выполнены в виде фланцев с соосно закрепленными на них звездочками (не показаны на фигурах), которые входят в зацепление со средством 27 для, передачи вращения, выполненным например,. в виде цепной передачи, охватывающей одновременно звездочки всех держателей 5-8, и системы шестерен (фиг. 5) . . , Редук-тор 23 (фиг.1) и средство 27 для передачи вращения имеют, одинаковые передаточные отношения, что обуславливает равенство по абсолютной величине угловых скоростей вращения рамы 16 и держателей 5-8 при работе прибора. Датчик 21 углового положения рамы 16 выполнен в виде источника 38 (фиг,2) света с диафрагмой 39, фотоприемников 40 и усилителей 41, при этом источник 38 света и диафрагма 39 закреплены на раме 16, фотоприёмники 40 установлены на подвижном кольце 22 механизма перемещения рамы 16 и соединены с усилителями 41. Датчик 21 углового положения рамы 16 может быть выполнен также в виде закрепленного на ней магнита 42 (фиг.З) и герконов 43, установленных на подвижном кольца 22. Счетчик 25 оборотов вала электропривода 24 выполнен в виде металлического диска 44 (фиг.4) с выступами 45, бесконтактного, например, индукционного, преобразователя 46 и регистра 47, при этом диск 44 закреплен, на валу электропривода 24, а выступы 45 диска 44 перемещаются в пазу 48 бесконтактного преобразователя 46, электрически связанного с интерфейсом 13 и со схемами 18 и .20 управления механизмов 17 и 19 перемещения рамы и держателей. Подвижное кольцо 22 механизма 17 перемещения рамы соединено с последней посредством фрикциона 49 (фиг.7) о электромагнитами 50, подключенными к датчику 21 (фиг.1) углевого положения рамы 16. Коллимированные детекторы 1- 4 регистрируют гамма-излучение, исходящее из исследуемого пациента.
Амплитудные анализаторы 9-12 обеспечивают спектрометрический ре.жим регистрации гамма-излучения, т.е. из всех импульсных сигналов, поступающих на них от соответствующих детекторов 1-4, пропускают только те, амплитуда которых лежит в заданных пределах, определя.емых шириной фотопика спектра из;лучения применяемого радионуклида.
Интерфейс 13, содержащий регистры, таймер и мультиплексор (не показаны на фигурах), предназначен для ввода в ЭВМ 14 данных об интенсивности регистрируемого в процессе исследования излучения на выходе амплитудных анализаторов 9-12, а также кодовых сигналов о номере детектора, направлений проецирования в номере проекции по командам от датчика 21 углового положения рамы 16 и механизма 17 ее перемещения.
ЭВМ 14 служит для сбора, заполнения и обработки регистрируемой радиометрической информации и для цифровой реконструкции (формирования) поперечной гамма-томограммы.
Устройство 15 вывода изображений обеспечивает возможность наблюдения и документирования реконсруированных поперечных томографических изображений.
Механизм 17 перемещения рамы приводит в движение раму 16 по круговой траектории вокруг пациента.
Механизм 19 перемещения держателей обеспечивает синхронное враг щение последних в процессе перемещения рамы 16 при регистрации и вводе в ЭВМ 14 радиометрической информации.
Механизмы.перемещения рамы и дежателей детекторов выполнены в виде планетарного механизма.
Схемы 18 и 20 управления механимов 17 и 19 перемещения рамы и держателей обеспечивают управление включением и реверсированием электропривода 24, а также работой элекромагнитной муфты 26 и фрикциона 4 с электромагнитами 50.
Датчик 21 углового положения ра служит для формирования управляющи сигналов (команд) в моменты времени, соответствующие повороту pai 16 на заданный угол.
Поперечный гамма-томограф работает следующим образом.
При включении прибора в момент времени t (фиг.8, 9) начинает работать электропривод 24, который приводит-в движение редуктор 23, вращающий раму 16 в направлении.
например, по часовой стрелке. В исходном состоянии электромагнитная муфта 26 обесточена и соединяет с редуктором 23 средство 27 для передачи вращения держателям 5-8,
которые врашаются синхронно с рамой 16, но в обратном направлении (т.е. против часовой стрелки). При этом в силу равенства передаточных отношений редуктора 23 и средства 27
для передачи вращения угловые скорости вращения рамы 16 и держателей 5-8 одинаковы по абсолютной величине. В результате держатели 5-8 (фиг.1) с закрепленными в них детекторами 1-4 перемещаются в исследуемой плоскости поступательно, т.е. ось каждого детектора при последующем его положении остается параллельной этой же оси при предыдущем положении детектора (фиг.8).
Таким образом, в процессе синхронного вращения рамы 16 и держателей 5-8 направление осей 33-36 детекторов 1-4 относительно пациента
поддерживается постоянным, что обеспечивает регистрацию излучения объекта детекторами 1-4 по первым угловым направлениям , и измерение первой группы из п проекции (п - число детекторов 1-4). Сигналы от детекторов 1-4 через ешплитудные анализаторы 9-12 поступают на регистры интерфейса 13. Последовательный опрос регистров осуществляется с помощью таймера и мультиплексора. Полученные данные об интенсивности излучения вместе с кодовыми сигналами о номере детектора, направлении проецирования и о порядковом номере проекции вводятся
в ЭВМ 14.
В исходном состоянии электромагниты 50 обесточены и фрикцион 49 (фиг.7 а) не соединяет подвижное кольцо 22 с рамой 16. В момент времени tf (ФИГ..9), когда угол Чр поворота рамы 16 (фиг.1) достигнет значения Ч (фиг.8 а), срабатывает датчик 21 (фиг.1) углового положе- ния рамы 16. При этом диафрагмированный световой поток от источника 38 света попадает на один из фотоприемников 40, сигнал с вькода которого через усилитель 41 подается на интерфейс 13 и на схемы 18 и 20 .
управления механизмами 17 и 19. При альтернативном выполнении датчика 21 магнит 42 вызывает срабатывание геркона 43, сигнал от которого поступает на интерфейс 13 и схемы 18
и 20 управления..
Электрический сигнал, поступающий с;о cxeNBJ 29 управления на электромагнитную муфту 26i вызывает срабатывание последней, вследствие чего средство 27 для передачи вращения отсоединяется от электрипривода 24 г и вращение держателей 5-8 вокруг своих осей прекращается. Уп равляющий сигнал, поступающий на интерфейс 13, отключает таймер и мультиплексор, опрос регистров пре кращается. Таким образом, к моменту t (фиг.8, 9) сбор информации о первой группе проекций заканчивается. В момент ti2 по команде сосхемы 18 управления подается ток в обмотки электромагнитов 50, включа ся фрикцион 49 (фиг.7, б), которым присоединяется подвижное кольцо 22 к раНе 16; одновременно запускается счетчик 25 оборотов вала электропривода 24, который продолжает работать и вращать раму 16 в том же (первоначальнпм) направлении. П этом выступы 45 (фиг.4) металличес кого диска 44 многократно проходят в пазу 48, запускают бесконтактный преобразователь 46. Выходные импул сы с преобразователями 46 запоминаются регистром 47. Через промежуток времени дЬ (фиг.9) после запу ка счетчика 25 оборотов, когда вал электропривода 24 совершит п оборо соответствующих дополнительному по вороту рамы 16 на угол oL, определяемый по формуле. 2J n-m где п - количество детекторов 1-4; m - число необходимых для реконструкции изображения проекций, в регистре 47 будет зафиксировано п,2. И пульсов. Выходной сигнал с регистра 47 поступает на схемы 18 и 20 управ ления мез{анизмами 17 и 19 и на интерфейс 13. При этом в момент времени t (фиг.8, 9) управляющие сигналы со схем 18 и 20 (фиг.1 реверсируют электропривод 24, отключа.ют муфту 26, подключая тем самым к электроприводу 24 средство 27 для передачи вращения; в результате рама 16 начинает вращаться про тив часовой стрелки, а держатели 58 - по часовой стрелке. Одновременн включаются таймер и мультиплексор и терфейса 13. Детекторы 1-4 начинают перемещаться поступательно и регист рировать излучение по новымугловым направлениям М(, Nij-Nij. Сигналы от детекторов 1-4 через амплитудные анализаторы 9-12 поступают на регистры интерфейса 13, производится их опрос и ввод в ЭВМ 14 информации о второй группе проекций.В момент времени t (фиг.8, 9), когда угол Чр поворота рамы 16 (фиг.1) достигнет значения , срабатывает датчик21 углового поло жения, рамы 16. При этом диафрагмированный световой поток от источвика 38 света попадает на фотоприемник 40, сигнал с которого через усилитель 41 подается на итерфейс 13 и на схемы 18 и 20 управления. При альтернативном выполнении датчика 21, магнит 42 вызывает срабатывание геркона 43, сигнал от которого поступает на итерфейс 13 и на схемы 18, 20 управления. Команда, поданная на интерфейс 13, прекращает опрос регистров и ввод в ЭВМ 14 данных, полученных при снятии второй группы проекций. По командам от схем 18, 20 управления производится реверсирование электропривода 24, обесточивание муфты 26 и включение счетГчика 25 оборотов. В результате рама 16 начинает вращаться по часовой стрелке, средство 27 для передачи вращения отсоединяется от электропривода 24, держатели 5-8 прекращают вращение своих осей, а регистр 47 начинает счет числа импульсов, поступающих на него от бесконтактного преобразователя 46. Через интервал времени,at после запуска счетчика 25 оборотов, когда вал электропривода 24 совершит п оборотов, соответствующих дополнительному повороту рамы 16 на угол оС (фиг.8), определяемый по формуле , 21 - K75J в регистре 47 (фиг.1) будет сосчитано П12 импульсов. Выходной сигн-ал с регистра 47 поступает на схемы 18 и 20 управления и на интерфейс 13. В момент времени t (фиг. 9) управляющие сигналы со схем 18 и 20 (фиг.1) включают муфгу 26 и подключают ток к обмоткам электромагнитов 50. При этом средство 27 для передачи вращения присоединяется к электроприводу 24, держатели 5-8 начинают вращаться против часовой стрелки, включается фрикцион 49, который соединяет подвижное кольцо 22 с рамой 16. одновременно по сигналу, поданному на итерфейс 13, начинается опрос регистров., на которые через амплитудные анализаторы 9-12 поступает радиометрическая информация от детекторов 1-4 о третьей группе из п.проекций (п - число детекторов 1-4) по угловым направлениям , No-N3 (фиг.8). Эта информация вместе с кодовьлми сигналами о номере детектора, направлении проецирования и о порядковом номере проекции вводятся в ЭВМ 14. Окончание ввода в ЭВМ 14 данных о третьей группе проекций происходит в момент t(, (фиг.9), когда угол Ч поворота рамы 16 (фиг.1) достигнет значения f . Описанный цикл автоматической рабрты гамма-томографа продолжается до тех пор, пока полное количество снятых проекций не достигнет требуемого значения т, после чего процесс исследования пациента заканчивается. Формирование томографического изображения осуществляется на ЭВМ 14 по известным алгоритмам реконструкции.
Таким образом, благодаря тому, что в процессе исследования детекторы 1-4 перемещаются по описываемой вокруг пациента окружности, а пространственное направление осей детекторов 1-4 при снятии каждой проекции поддерживается постоянным, детектирование излучения производится из параллельно расположенных цилиндрических участков объекта, причем изменение расстояния между детекторами 1-4 и исследуемым объектом существенно уменьшается. В результате значительно улучшается к,чество изображения и увеличивается статистическая, надежность обнаружения патологических очагов, что существенно повышает точность исследогвания пациента.
Формула изобретения
Поперечный гамма-томограф, содержащий коллимйрованные детекторы
эмиссионного излучения, соединенные через амплитудные анализаторы и интерфейс с электронно-вычислительной машиной, поворотную.раму с установленными на ней держателями детекторов,
механизм перемещения держателей детекторов со схемой управления, механизм перемещения рамы со схемой управления и датчик углового положения рамы, отличающийс я тем, что, с целью увеличения надежности обнаружения патологических очагов путем поддержания минимально возможного расстояния между апертурой каждого детектора и поверхностью тела исследуемого, в нем держатели закреплены на раме на осях с возможностью их одновременного и синхронного вращения вокруг осей, расположенных перпендикулярно плоскости рамы по окружности равноудаленно друг от друга, а механизмы перемещения рамы и держателей детекторов выполнены в виде планетарного механизма.
Источники информации,
принятые во внимание при экспертизе
1. BowEey A.R. etaE A.Radioisotoре scanner for Rectilinear are, transverse sution and LongitudinaP
Sebtiqn Scanning. The British LournaTof Radioeogy 1973, т.45, 544, с.262-271.

| название | год | авторы | номер документа |
|---|---|---|---|
| Поперечный гамма-томограф | 1982 |
|
SU1063391A2 |
| Поперечный гамма-томограф | 1982 |
|
SU1050666A1 |
| Рентгеновское вычислительное томографическое устройство | 1989 |
|
SU1608526A1 |
| Вычислительный томограф | 1988 |
|
SU1608598A1 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2745304C1 |
| ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ (ВАРИАНТЫ) | 1993 |
|
RU2071725C1 |
| РЕНТГЕНОВСКИЙ РЕФЛЕКТОМЕТР | 1999 |
|
RU2176776C2 |
| ТОМОГРАФ С ГАММА-КАМЕРОЙ | 2024 |
|
RU2835777C1 |
| Устройство для контроля положения кислородной фурмы | 1990 |
|
SU1696487A1 |
| Устройство для исследования совершенства структуры монокристаллических слоев | 1985 |
|
SU1396023A2 |




ff/7ff/yefff
H /foffSwff X
.I
/f0/fy /f0/fA y //
фе/г,1
ff 4fff гм /7К-/7 &су Л
X/ t
X. f . / / .1,
X
CJrfj /f
г.ге
к 9 e/f K7/7joy 2
7
I
/f г/лулу y/rjffff jreffM
в
фуг.&
А- А
4fff -39 -Jff
--- 7)ТЪ аJ/
if
Ф(/г.7 /y; /y/ / fft 3ffgf1l (p&gj fff fff
f .
4sj4 воГ%5,4ji «О
iX,;
5 t
-o
