Изобретение относится к рентгвйо sxHHKia, в частности к рантгеновскю- вычислительным томографам. Ирвестны томографы четырех поко/ шний, реализующие различные типы движений источника и детекторов 1 .Наиболее быстродействующими явля томографы 3-го и 4-го поколений, в которых имеет место только круговое движение. Однако недостатком этих систем , является необходимость подбора боль шого количества детекторов со строго заданными параметрами или использования специальных средств для коррек ировки сигналов детекторов на неоднородность -их характеристик. Кроме того, использование широкого веерного пучка требует средств поддержания пространственной однородности пучка, а так.же использования МО111НОЙ рентгеновской трубки. Наиболее близким к предлагаемому техническим решением является рентгеновский томограф первого поколения, содержащий узкоколлимированный источник рентгеновского излучения, детектор излучения, изогнутый соединитех ьный рычаг, на противоположных концах которого закреплены йс7ЮЧНИК и детектор, держатель исследуемого объекта, привод поворота соединительного рычага с источником и детектором .относительно держателя привод линейного перемещения, соединительного рыча.га с источником и детектором относительно держателя, схе му предварительной обработки сигнало детектора, ЭВМ и дисплей 2, Достоинством вычислительных томографов первого поколения является од нородность используемого пучка и детектора, что снимает необходимость использования дополнительных средств коррекции сигналов различных детекто роз. . ,Недостаток этого томографа - огра ничейное быстродействие, связанное с необходимостью перемещения значительных масс, которое определяется и необходимостью перемещения вместе с прямолинейно движущимся рычагом противовеса, Цель изобретения - повышение быс родействия томографа. Поставленная цель достигается тем что в рентгеновском вычислительном томографе, содержащем узкоколлимиро ванный источник рентгеновского -излу чения, детектор излучения, изогнуты соединительный рычаг, на противоположных концах которого закреплены источник и детектор, держатель исследуемого объекта, привод поворота соединительного рычага с источником и детектором вокруг держателя, при.вод дополнительного перемещения сое динительного рычага с источником и детектором относительно держсггеля, схемупредварительной обработки сигналов детектора, ЭВМ и дисплей, привод .дополнительного перемещения выполнен в виде реверсивного привода поворота рычага с источником и детектором вокруг оси, проходящей чаре фокус источника и параллельной оси основного поворота рычага. На чертеже представлена схема рентгеновского вычислительного томографа. Рентгеновский вычислительный томограф содержит узкоколлимированный рентгеновский источник 1, детектор 2 соединительный рычах 3, на противоположных концах которого установлены источник 1 и детектор 2, держатель 4 исследуемого объекта 5, Трубка, (источник) 1 .установлена на поворотном элементе б, .который приводится во вращение с помощью привода 7, Поворотный элемент 6 и привод 7 установлены на -поворотной раме 8, приводимой во вращение с помощью привода 9, Рама 8 совершает вращение вокруг оси О, проходящей через исследуемый объект 5, Трубка 1 вместе с -рычагом 3 и детектором 2 совершает поворот с помощью элемента 6 вокруг Оси О, проходящей через фикус трубки 1 и параллельной оси О, Кроме того, томограф содержит схеМУ 10 предварительной обработки, ЭВМ 11, дисплей 12, схему 13 дифференцирования. Первое пороговое устройство 14, второе пороговое устройство 15, схему.И.16,.Схема.10 пред-, варитйльной обработки, схема 13 дифференцирования и.первое пороговое устройство 14 подключены.к детектору 2, Выход схемы 13 дифференцирования подключен к второму пороговому . устройству 15,. Выходы пороговы с устройств 14 и 15 подключены к входам схемы И 16, вьоход которой подключен к управляквдим входам приводов 7 и 3, Рентгеновский томограф работает следующим образом. При неподвижной раме 8 (привод 9 выключен) происходит поворот источника 1 с рычагом 3 и детектором 2 вокруг оси О, Величина поворота выбирается такой, чтобы пучок источника 1 захватил весь угловой диапазон размв-. щения исследуемого объекта5, Во время этого поворота сигналы детектора 2 попадают в схему 10 предварительной обработки, откуда они поступают в память ЭВМ 11, Кроме того, сигналы детектора отслеживаются схемой 13 дифференцирования и пороговым устройством 14, Это производится для установления момента окончания сканирования пучком исследуемого объекта 5, Сутьэтого решения заключается в том. что при выходе .излучения из объекта 5 его интенсивность становится максимальной, т.е. максимален сигнал детектора, а кроме того, дифференцирование этого сигнала дает ноль. Порог срабатывания устройства 14 выбран на основе величин напряжения и тока на источнике 1, а нулевой УР9вень на выходе схемы 13 дифференцирования фиксируется пороговым устрюй ством 15. Одновременное испрльзование двух пороговых устройств связано с тем, что нулевой уровень на вы ,|ходе 13 дифференцирования может быть в определенные моменты получен и во время прохождения пучка по объекту 5 а точная установка уровня срабатывания порогового устройства 14 затруднена (фактически порог срабатывания должен быть несколько ниже максималь ного сигнала детектора). В связи с этим каждый по отдельности сигнал по роговых устройств 14 и 15 не обеспечивает однозначной индикации момента окончания прохождения пучком объекта 5. Однако одновременное наличие этих сигналов одйозначность обес чПечивает,для чего служит схема И которая при поступлении на ее входы сигналов с обоих пороговых устройств 14 и 15 вырабатывает сигнал, выклю-. чающий привод 7 и включающий, привод 9. Последний поворачивает раму на заданный угол, например после чего цикл сканирования объекта 5 пучком источника повторяется в обратном направлении. Таким обраэом, происходит накапливание измерительных данных в ламяти ЭВМ, которая по окончании всех циклов сканирования вос:станавливает изображение исследуемого слоя объекта 5 с помощью алгоритма восстановления томографов третьеГО поколения. Таким образом, в предлагаемом томографе вместо линейного сканирования использовано вращение вокруг фокуса источника жестко соединенных источника и детектора. Это позволяет снизить общую массу движущихся частей, поскольку отпадает необходимость в использовании противовеса и системы экстренного торможения. Кроме того, момент инерции сборки, источник, рычаг, детектор при повороте меньше, чем при линейном перемещении. Все эти факторы позволяют поднять быстродействие томографа первого поколения практически до уровня томографа второго поколения, дохраняя все достоинства томографов первого поколения и избегая недостатков, связанных с использованием нескольких детекторов (от. 30 детекторов и более JB томографах второго поколения) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Эмиссионно-трансмиссионный вычислительный томограф | 1983 |
|
SU1153885A1 |
| РЕНТГЕНОВСКИЙ ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ | 1992 |
|
RU2069854C1 |
| РАДИАЦИОННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ ИНТРОВИБРОВИЗОР | 1992 |
|
RU2146814C1 |
| Способ томографического исследования объектов | 1983 |
|
SU1087932A1 |
| Способ вычислительной томогра-фии и ТОМОгРАф для ЕгО РЕАлизА-ции | 1979 |
|
SU807173A1 |
| Устройство для вычислительной рентгеновской томографии | 1980 |
|
SU873065A1 |
| СПОСОБ РАДИАЦИОННОЙ ВЫЧИСЛИТЕЛЬНОЙ ВИБРОТОМОГРАФИИ | 1992 |
|
RU2114419C1 |
| ВЫЧИСЛИТЕЛЬНЫЙ ТОМОГРАФ (ВАРИАНТЫ) | 1993 |
|
RU2071725C1 |
| Вычислительный томограф | 1988 |
|
SU1608598A1 |
| Вычислительный томограф | 1982 |
|
SU1047283A1 |
РБНТГ:ЕНОВСКИЙ ВЫЧИСЛИТЕЛЬНЫЙ ТО ЮГРАФ, содержащий узкоколлимиро- ванный источник рентгеновского излу- : чения, детектор излучения, изогнутый соединительный рычаг, на противопо ложных концах которого закреплены источник и детектор, держатель исследуемого объекта, привод поворота соединительного рычаг а с источником и детектором вокруг держателя, привод дополнительного перемещения соединительного рычага с источником и детектором относительно держателя, схему предварительной обработки сигналов детектора, ЭВМ и дисплей, о т л и ч а ю щ и и с я тем, что, с целью повышения его быстродействия, привод дополнительного перемещения выпЬл-нен в виде реверсивногй привода поворота рычага с источником и детектором вок-© руг О.СИ, проходящей через фокус ис(Л точника и параллельной оси основного поворота рычага. 7 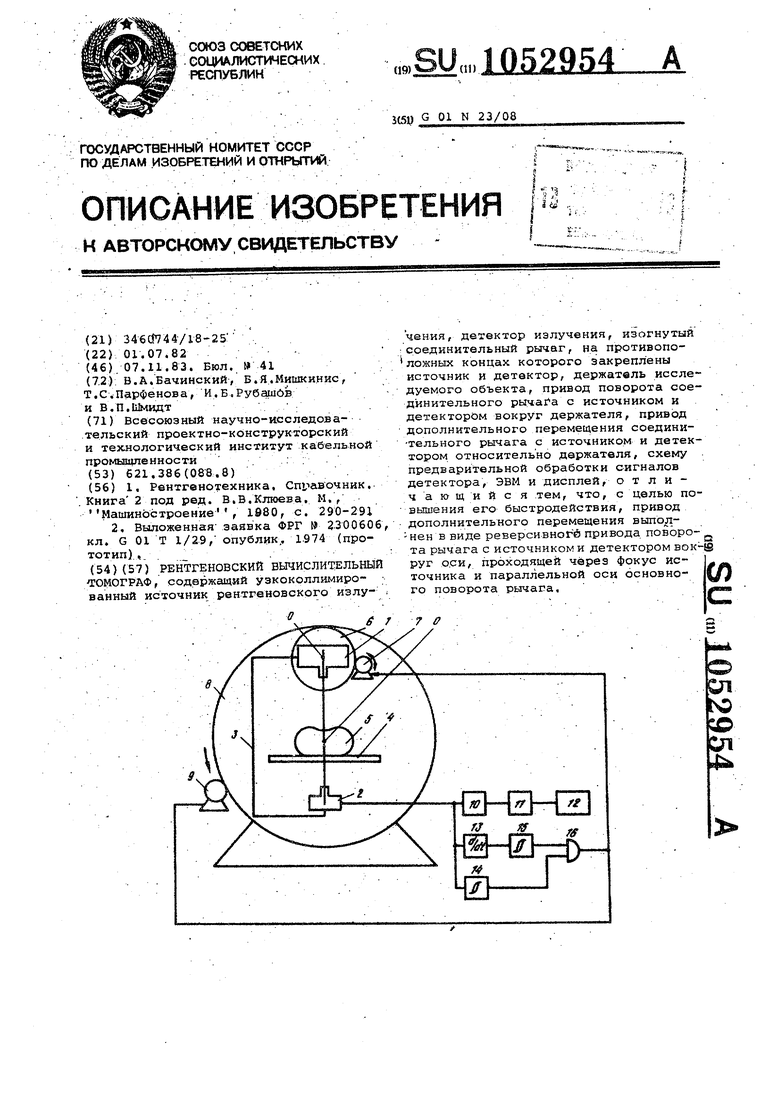
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рентгенотехника | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| В.В.Клюева | |||
| М., Машиностроение, 1980, с | |||
| РЕЛЬСОВАЯ ПЕДАЛЬ | 1920 |
|
SU290A1 |
| Выложенная- заявка ФРГ 3300606, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
