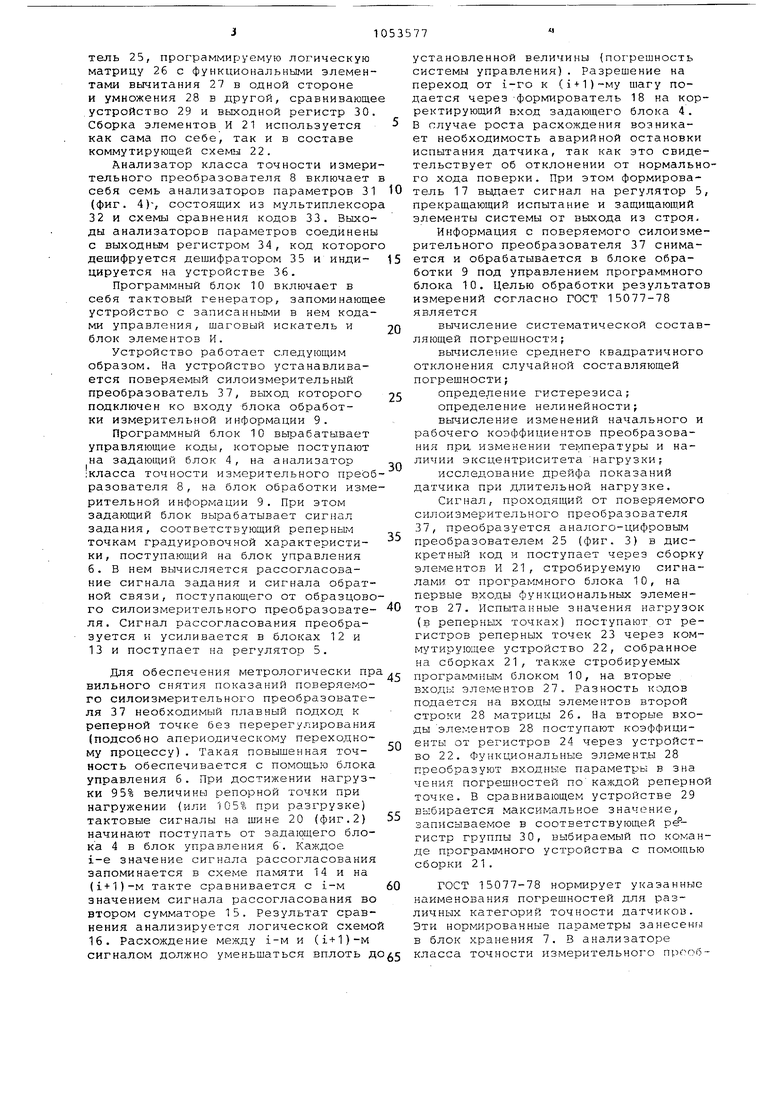
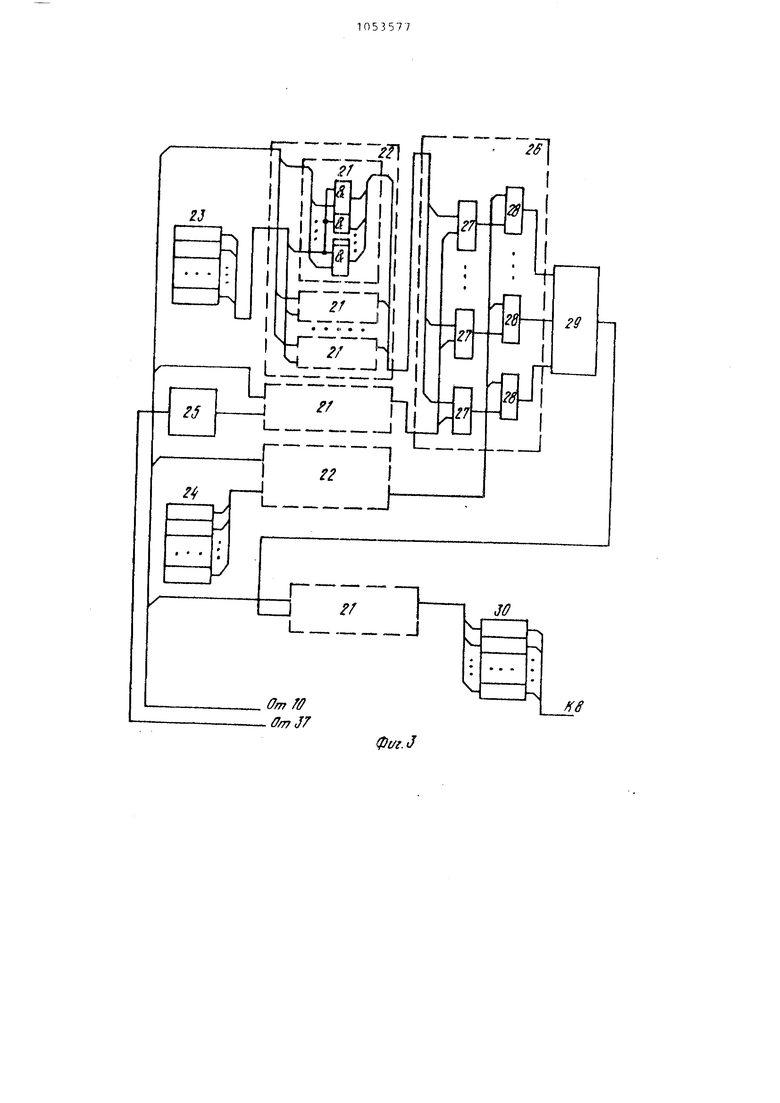
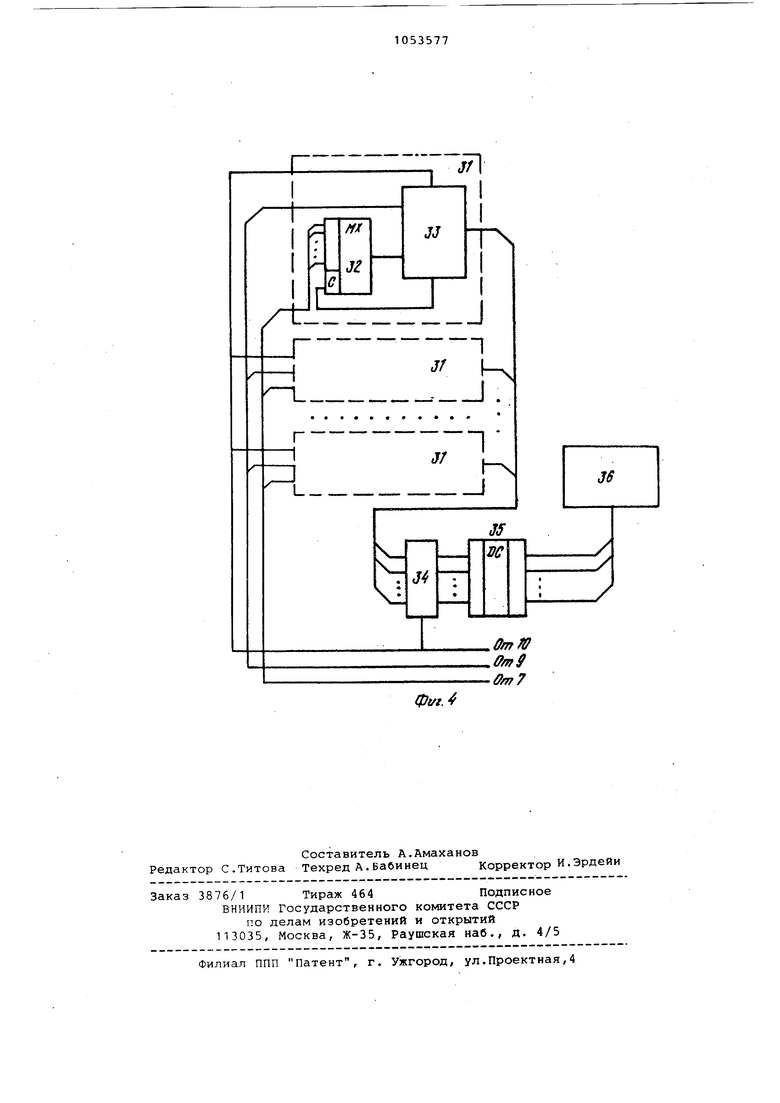
тель 25, программируемую логическую матрицу 26 с функциональными элементами вычитания 27 в одной стороне и умножения 28 в другой, сравнивающе устройство 29 и выходной регистр 30 Сборка элементов И 21 используется как сама по себе, так и в составе коммутирующей схемы 22. Анализатор класса точности измери тельного преобразователя 8 включает себя семь анализаторов параметров 31 (фиг. 4)-, состоящих из мультиплексор 32 и схемы сравнения кодов 33. Выходы анализаторов параметров соединены с выходным регистром 34, код которог дешифруется дешифратором 35 и индицируется на устройстве 36. Программный блок 10 включает в себя тактовый генератор, запоминающе устройство с записанными в нем кодами управления, щаговый искатель и блок элементов И. Устройство работает следующим образом. На устройство устанавливается поверяемый силоизмерительный преобразователь 37, выход которого подключен ко входу блока обработки измерительной информации 9. Программный блок 10 вырабатывает управляющие коды, которые поступают на задающий блок 4, на анализатор ;класса точности измерительного преоб разователя 8, на блок обработки изме рительной информации 9. При этом задающий блок вырабатывает сигнал задания, соответствующий реперным точкам градуировочной характеристики, поступающий на блок управления 6. В нем вычисляется рассогласование сигнала задания и сигнала обратной связи, поступающего от образцово го силоизмерительного преобразователя. Сигнал рассогласования преобразуется и усиливается в блоках 12 и 13 и поступает на регулятор 5. Для обеспечения метрологически пр вильного снятия показаний поверяемого силоизмерительного преобразователя 37 необходимый плавный подход к реперной точке без перерегулирования (подсобно апериодическому переходному процессу). Такая повыщенная точнесть обеспечивается с помощью блока управления б. При достижении нагрузки 95% величины репорной точки при нагружении (или 105% при разгрузке) тактовые сигналы на щине 20 (фиг.2) начинают поступать от задающего блока 4 в блок управления б. Каждое i-e значение сигнала рассогласования запоминается в схеме памяти 14 и на (i+1)-M такте сравнивается с i-м значением сигнала рассогласования во втором сумматоре 15. Результат сравнения анализируется логической схемо 16. Расхождение между i-м и (i+1)-M сигналом должно уменьщаться вплоть д установленной величины (погрещность системы управления). Разрещение на переход от i-ro к (i+1)-му шагу подается через -формирователь 18 на корректирующий вход задающего блока 4. В случае роста расхождения возникает необходимость аварийной остановки испытания датчика, так как зто свидетельствует об отклонении от нормального хода поверки. При этом формирователь 17 выдает сигнал на регулятор 5, прекращающий испытание и защищающий элементы системы от выхода из строя. Информация с поверяемого силоизмерительного преобразователя 37 снимается и обрабатывается в блоке обработки 9 под управлением программного блока 10. Целью обработки результатов измерений согласно ГОСТ 15077-78 является вычисление систематической составляющей погрещности; ВЕЛЧисление среднего квадратичного отклонения случайной составляющей погрешности; определение гистерезиса; определение нелинейности; вычисление изменений начального и рабочего коэффициентов преобразования при. изменении температуры и наличии эксцентриситета нагрузки; исследование дрейфа показаний датчика при длительной нагрузке. Сигнал, проходящий от поверяемого силоизмерительного преобразователя 37, преобразуется аналого-цифровым преобразователем 25 (фиг. 3) в дискретный код и поступает через сборку элементов И 21, стробируемую сигналами от программного блока 10, на первые входы функциональных элементов 27. Испытанные значения нагрузок (в реперных точках) поступают от регистров реперных точек 23 через коммутирующее устройство 22, собранное на сборках 21, также стробируемых программным блоком 10, на вторые входы элементов 27. Разность кодов подается на входы элементов второй строки 28 матрицы 26. На вторые входы элементов 28 поступают коэффициенты от регистров 24 через устройство 22. Функциональные элементы 28 преобразуют входные параметры в зна чения погрешностей покаждой реперной точке. В сравнивающем устройстве 29 выбирается максимальное значение, записываемое в соответствующей р гистр группы 30, выбираемый по команде программного устройства с помощью сборки 21. ГОСТ 15077-78 нормирует указанные наименования погрешностей для различных категорий точности датчиков. Эти нормированные параметры занесен, в блок хранения 7. В анализаторе класса точности измерительного прообразователя 8 по .команде пpoгpa ф1нoгo блока 10 происходит сравнение с соответствующими результатами обработки и измерений в блоке 9 и определяется класс точности.
Нормированные параметры по каждому 5 виду погрешности поступают на анализатор 31 (фиг. 4). На мультиплексор 32 такого анализатора подаются нормированные значения по каждому классу точности (согласно ГОСТ 15077-78), , Ю который последовательно пропускает их на схему 33 под управлением программного блока 10. Если погрешность поверяемого силоизмерительного преобразователя 37 больше заданного значе-15 ния, на синхровход С мультиплексора
32 подается строб, открывающий прохождение следующего значения на схему 33. В противном случае в разряд регистра 34 заносится единица. По синхроимпульсу программного устройства содержимое регистра 34 дешифрируется дешифратором 35 и выдается класс точности на индикаторное устройство 36.
Описанное устройство позволяет производить поверку на стабильность показаний датчика, применять менее быстродействующие измерительные и регистрирующие приборы благодаря предусмотренной возможности получения площадок на уровнях нагрузок, соответствующих реперным точкам.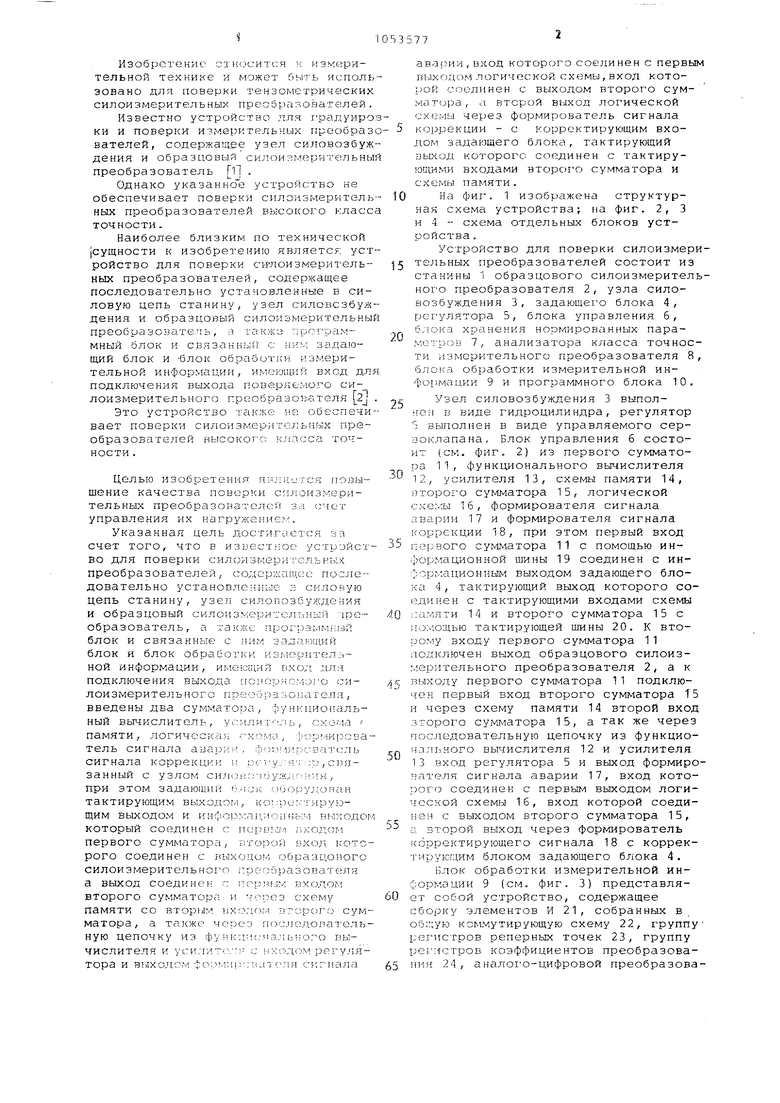
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поверки силоизмерительных преобразователей | 1988 |
|
SU1597635A1 |
| Способ поверки силоизмерительных преобразователей и устройство для его реализации | 1977 |
|
SU735942A1 |
| Устройство для автоматической поверки электроизмерительных приборов | 1980 |
|
SU930185A1 |
| Цифроаналоговая вычислительная система | 1987 |
|
SU1483468A1 |
| Установка для автоматической поверки электроизмерительных приборов | 1981 |
|
SU954913A1 |
| Калибратор фазы | 1982 |
|
SU1027640A1 |
| Устройство для автоматической поверки стрелочных приборов | 1991 |
|
SU1800262A1 |
| Устройство для автоматической поверки электроизмерительных приборов | 1985 |
|
SU1307418A1 |
| Устройство для автоматической поверки электроизмерительных приборов | 1985 |
|
SU1307420A1 |
| Способ автоматической поверки аналоговых электроизмерительных приборов и устройство для его осуществления | 1985 |
|
SU1293677A1 |
УСТРОЙСТВО ДЛЯ ПОВЕРКИ СИЛОИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ, содержащее последовательно установленные в силовую цепь станину, узел силовозбуждения и образцовый силоизмерительный преобразователь, а также программный блок и связанные с ним задающий блок и блок обработки измерительной информации, имеющий вход для подключения выхода поверяемого силоизмерительного преобразователя,о т л и ч а ю щ е е с я тем,что,с целью повышения качества поверки силоиэмерительных преобразователей за счет управления их нагружением, в него введены два сумматора, функциональный вычислитель, усилитель, схема памяти, логическая схема, формирователь сигнала аварии, формирователь сигнала коррекции и регулятор, связанный с узлом силовозбуждения, при этом задающий блок оборудован тактирующим выходом, корректирующим входом и информационным выходом, который соединен с первым входом первого сумматора, второй вход которого соединен с выходом образцового силоизмерительного преобразователя, а выход соединен с первым входом второго сумматора и через схему памяти со вторым входом второго сумматора, а также через последовательную цепочку из функционального вьг гислителя § и усилителя с входом регулятора и вы(Л ходом формирователя сигнала аварии, вход которого соединен с первым выходом логической схемы, вход которой соединен с выходом второго сумматора, а второй выход логической схемы через формирователь сигнала коррекции - с корректирующим входом задающего блока, тактирующий выход которого соединен с тактирующими входами второго сумматора и схемы памяти. сд со СП - 1
Фиг.
0t/f.J
ф1/1.4
| , 1 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ поверки силоизмерительных преобразователей и устройство для его реализации | 1977 |
|
SU735942A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
