(54) СПОСОБ ПОВЕРКИ СИЛОИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАГЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поверки силоизмерительных преобразователей | 1988 |
|
SU1597635A1 |
| Устройство для поверки силоизмерительных преобразователей | 1982 |
|
SU1053577A1 |
| УСТАНОВКА СИЛОИЗМЕРИТЕЛЬНАЯ ГИДРАВЛИЧЕСКАЯ ОБРАЗЦОВАЯ | 2003 |
|
RU2265813C2 |
| УСТРОЙСТВО ДЛЯ ПОВЕРКИ СИЛОИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1996 |
|
RU2122714C1 |
| МАШИНА ГИДРАВЛИЧЕСКАЯ СИЛОИЗМЕРИТЕЛЬНАЯ ОБРАЗЦОВАЯ | 1997 |
|
RU2122715C1 |
| Силоизмерительная машина | 1981 |
|
SU1029020A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ МЕТРОЛОГИЧЕСКИХ | 1971 |
|
SU310205A1 |
| Устройство для поверки стрелочных приборов с круговой шкалой | 1981 |
|
SU1106985A1 |
| МАШИНА СИЛОЗАДАЮЩАЯ (СИЛОИЗМЕРИТЕЛЬНАЯ) СЖАТИЯ ОБРАЗЦОВАЯ | 2011 |
|
RU2456565C1 |
| Устройство для автоматической поверки стрелочных приборов | 1991 |
|
SU1800262A1 |

1
Изобретение относится к испытательной технике и предназначено преимущественно для аттестации и периодической поверки различных силоизмерительных преобразователей, например тензометрических.
Известны способ и устройство поверки силоизмерительных преобразователей методом непосредственного воспроизведения силы нагружением образцовыми мерами массы на специальных образцовых силоизмерительных машинах 1.
Однако поверка этими способами.производится на громоздких, требующих больщих производственных площадей испытательных машинах. Помимо того, что мащины громоздки и дорогостоящи, они должны еще быть универсальными и обеспечивать испытание преобразователей с широким диапазоном пределов измерения.
Нагружение на таких мащинах осуществляется наложением грузов образцовой массы. Ввиду универсальности машин нагружение на каждой новой ступени производится различной комбинацией грузов. При этом нарущается требование плавного возрастания нагрузки при нагружении и уменьщения нагрузки при разгружении.
Известны также установки для тарировки и поверки динамометров, обеспечивающие плавное бесступенчатое нагружение 2.
Однако такие установки трудно автоматизировать и они малопроизводительны.
Цель изобретения - повышение производительности труда при поверке и тарировке силоизмерительных преобразователей, достижение плавного их нагружения и обеспечение автоматической регистрации результатов измерения.
10
Для этого по предлагаемому способу поверку силоизмерительных преобразователей производят при непрерывном одновременном нагружении (разгружении) образцового и поверяемого преобразователя. При этом не15прерывно сравнивают сигнал образцового преобразователя с сигналом источника опорного напряжения, разделенного реперными точками на равные интервалы, и регистрируют величину выходного сигнала поверяе20мого преобразователя или ее отклонение от выходного сигнала образцового преобразователя в момент появления импульса о совпадении сигнала образцового преобразователя с реперными точками интервала.
Такой способ может быть осуществлен устройством для поверки и градуировки, содержащим образцовый силоизмерительный преобразователь, устройство непрерывного натружения (разгружения) и блок измерения.
Отличие устройства, позволяющего осуществить предлагаемый способ, состоит в том, что оно снабжено блоком программного управления и блоком формирования управляющих импульсов, соответствующих реперньш точкам градуировочной характеристики образцового преобразователя, к входу которого подключены параллельно-встречно включенные выходы образцового преобразователя и источника опорного напряжения, а к выходу - блок программного управления, при этом вь1ход поверяемого преобразователя подключен к блоку измерения с цифропечатающим устройством.
Кроме того, оно снабжено вторым источником опорного напряжения и блоком измерения несоответствия, к входу которого .подключены последовательно-встречно выходы поверяемого преобразователя и второго источника опорного напряжения, а к выходу - блок регистрации.
Устройство снабжено компенсирующей пружиной, последовательно с которой установлены образцовый и поверяемый силоизмерительные преобразователи. ,
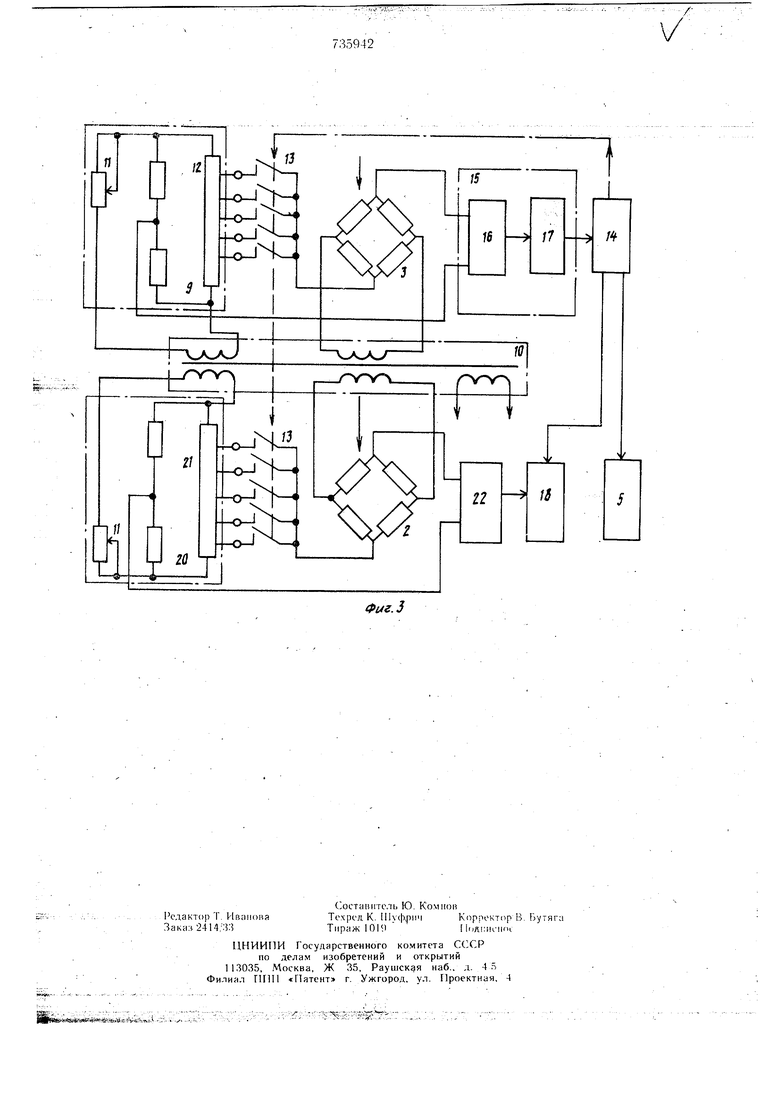
На фиг. 1 изображена кинематическая схема установки нагружения; на фиг. 2 - принципиальная электрическая схема устройства; на фиг. 3 - вариант принципиальной электрической схемы устройства с блоком измерения несоответствия.
На корпусе 1 устройства установлена плита с поверяемым преобразователем 2, плита с образцовым преобразователем 3 и компенсирующая пружина 4.
В верхней части корпуса находится механизм 5 нагружения преобразователей,состоящий из реверсивного электродвигателя 6, редуктора 7 и винтовой пары 8.
При включении электродвигателя 6 вращение через редуктор 7 передается на винтовую пару 8, преобразующую вращательное движение червячного колеса в поступательное движение винта. Винт, перемещаясь вниз, входит в контакт с доверяемым преобразователем и при дальнейщем перемещении создает возрастающее усилие, величина которого зависит от величины перемещения винта и жесткости преобразователей и компен.сирующей пружины. В зависимости от нагрузочных характеристик компенсирующей пружины возможны различные способы задания и линеаризации нагрузок.
Кроме того, компенсирующая пружина увеличивает величину хода при нагружении (разгружении) преобразователей, ход которых составляет малую величину, что затрудняет равномерное нагружение и разделение диапазона на реперные точки.
Ввиду того, что поверяемый и образцовый преобразователи, а также компенсирующая пружина установлены последовательно, в любой промежуток времени на преобразователи воздействует одинаковая сила, J при которой возможно сравнение преобразователей.
Образцовый и поверяемый преобразователи и источник опорного напряжения 9 (см. фиг. 2) своими входами подключены к одному блоку питания 10. Таким образом, 10 изменение питающего напряжения одинаково влияет на преобразователи, и источник опорного напряжения не вносит погрещности. Во входную цепь источника опорного напряжения включен резистор 11 для подгонки orfopHoro напряжения по выходному сигналу образцового преобразователя. Выходной сигнал источника образцового напряжения на делителе 12 разделен контактами 13 блока программного управления 14 на равные интервалы.
0 Выход источника опорного напряжения и образцового преобразователя подключены последовательно-встречно к входу блока 15 формирования импульсов , состоящего из нуль-органа 16 и генератора тактовых импульсов 17. Выход блока 15 подключен к
входу блока программного управления 14, который управляет контактами 13, цифропечатающей установкой 18 и механизмом 5. К входу блока измерения 19 подключен поверяемый преобразователь 2.
g При включении установки, когда преобразователи не нагружены, блок 15 дает команду на измерение и регистрацию начального сигнала поверяемого преобразователя. Затем в соответствии с установленной программой блок программного управления 14
подает команду на механизм нагружения 5. Осуществляется нагружение преобразователей. При этом контакт 13, соответствующий первой реперной точке, замкнут. Происходит сравнение выходного сигнала нагружаемого преобразователя 3 с первой реперНОИ точкой.
Когда выходной сигнал преобразователя 3 станет равным напряжению, соответствующему первой реперной точке источника опорного напряжения 9, нуль-орган 16 фиксирует этот момент, и генератор тактовых импульсов 17 выдает сигнал о прохождении нагрузкой реперной точки. Блок программного управления 24 производит соответствующие включения, и срабатывают блок измерения 19 и цифропечатающее устройство 1.8. После этого отключается контакт 13 первой реперной точки и включается контакт 13 второй реперной точки. Цифропечатающее устройство 18 фиксирует заранее известную величину выходного сигнала образцового преобразователя, соответствующую первой реперной точке, и измеренную величину поверяемого преобразобателя 2. Зафиксированные сигналы можно сравнить. Таким образом, при нагружении будут пройдены все реперные точки.
При достижении последней реперной точки блок, программного управления подает команду на реверс механизма нагружения 5, и все происходит аналогично, но в обратном порядке.
В блоке 14 можно заранее установит необходимое количество циклов нагружения - разгружения до установки устройства нагружения 5. При измерении не будет внесена погрешность в случае, если время измерения блоком 19 во много раз меньше скорости нагружения. Так, если время нагружения от нуля до номинального значения (последней реперной точки) 5 мин (300с) а время измерения блоком 19-0,1 с, то динамическая погрешность при равномерном непрерывном нагружении составит всего --100% 0,ОЗЗ.Причем время печати не Ёлияет на динамическую погрешность измерения, так как может производиться после измерения.
Если устройство дополнить еше одним источником опорного напряжения 20 с делителем 21, разделенным контактами 13 на реперные точки (см. фиг. 3) и находяшимся в полном соответствии с источником 9 и образцовым преобразователем 3, то, снабдив устройство блоком 22 несоответствия, можно непосредственно измерять отклонения поверяемого преобразователя от показаний образцового преобразователя.
Устройство работает следу,ощим образом.
При достижении нагрузкой соответствующей реперной точки блок 15 формирования импульсов выдает сигнал-импульс. Усилитель некомпенсации блока 22 измерения несоответствия усиливает сигнал рассогласования, и цифропечатающее устройство 18 по команде блока программного управления 14 фиксирует отклонение выходного сигнала поверяемого преобразователя от образцового преобразователя. После этого блок программного управления 14 замыкает соответствуюший контакт 13 и подготавливает цепи сравнения для фиксации выходного сигнала на следующей реперной точке нагружения.
Применение данного способа и устройства позволит за счет автоматизации процесса тарировки, получить экономический эффект при серийном производстве преобразователей ориентировочно 100 тыс. рублей на одну установку.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
№ 235360, кл. &01 L 25/00, 1967 (прототип).
735942
V
