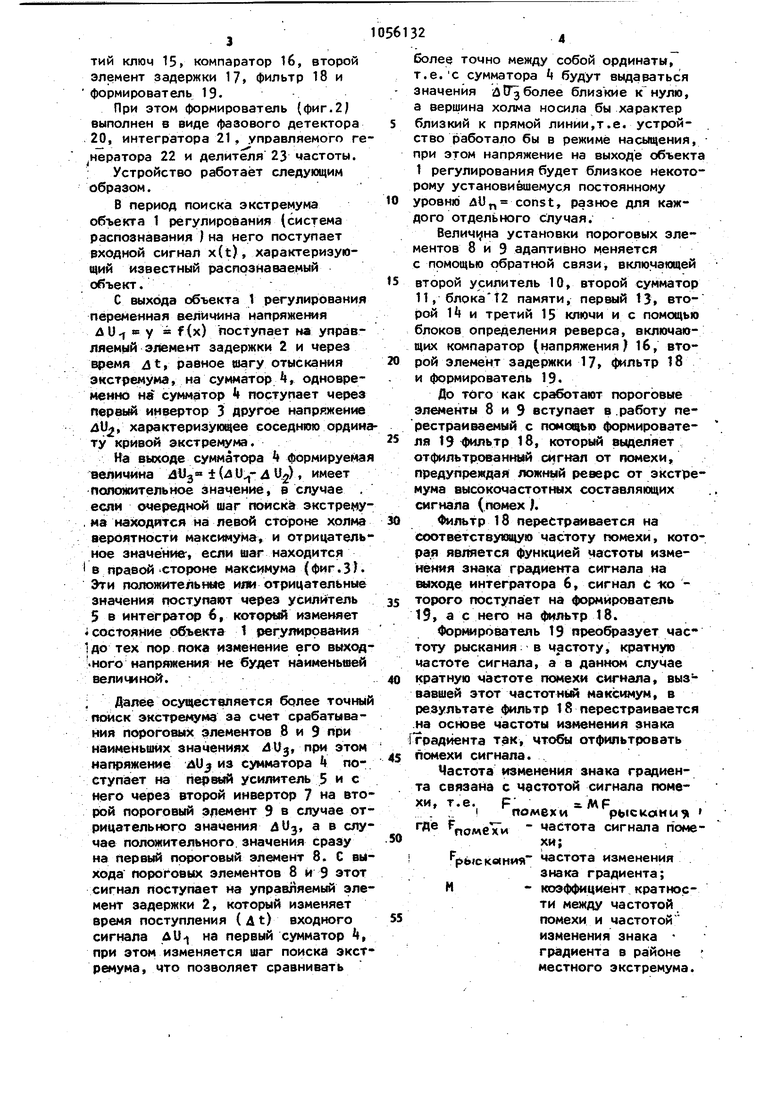
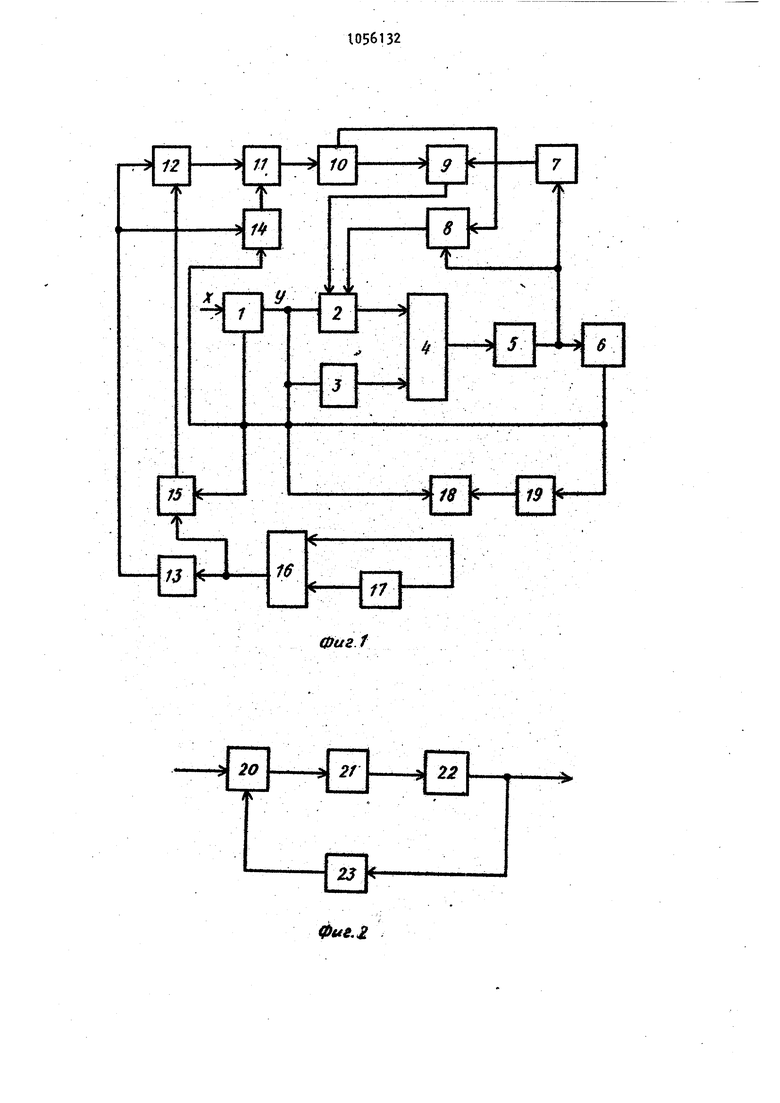
I .. Изобретение относится к распозна ванию образов и может быть использо вано в отраслях технической кибернетики, где требуется производить операцию поиска экстремума некоторо функции качества регулирования неизвестных параметров объекта, в час ности устройства для распознавания образов. Известен экстремальный регулятор содержащий дифференциатор, сумматор интегратор, реверсирующее устройство, исполнительный элемент, импульсный модулятор и трехпозиционный электромеханический релейный элемент fl. Недостатком этого устройства лв ляется невысокая точность отыскания величины экстремума статической характеристики объекта регулирования вследствие ухода частотных параметров импульсного модулятора и погрешностей, присущих электромехан ческим релейным элементам. Наиболее близким к изобретению является устройство, содержащее последовательно соединенные сумматор, усилитель, интегратор и объект регу лирования, выход которого соединен с блоком вычисления приращения регу лируемой величины, выход которого соединен с инвертором приращения управляющего воздействия, соединенного через систему реле и,потенциометров с первый входом сумматора, выход интегратора соединен с инвертором приращения регулируемой величины, подключенным через систему других реле и потенциометров к втор му входу сумматора С2 J.. Недостатком его является невысокая точность отыскания экстремума статической характеристики объекта регулирования вследствие постоянног неизменяемого шага при отыскании экстремума, приводящего при регулировании объекта к погрешностям при неполностью известном характере нелинейности вследствие индетерменис CKdro характера внешних воздействий а также за счет погрешностей, прису электромеханическим релейным элемен там. Цель изобретения состоит в повыш нии точности регулирования. Поставленная цель достигается те что в устройство, содержащее первый I и второй инверторы и пбследователь1но соединенные сумматор, усилитель 322 , интегратор и . объект регулирования, введены первый элемент задержки, вход которого соединен с выходом объекта регулирования, а выход - с первым входом сумматора, второй вход которрго соединен с выходом первого инвертора, вход которого соединен с выходом объекта регулирования, первый и второй пороговые элементы, выходы которых соединены с вторым и третьим входами первого элемента задержки, выход первого усилителя соединен с первым входом первого порогового элемента, и через второй им- / вертор - с первым входом второго порогового элемента, и последовательно соединенные формирователь,фильтр, второй элемент задержки, компаратор, первый ключ, блок памяти, второй сумматор и второй усилитель, выходы которого соединены с вторыми входами первого и второго пороговых элементов., и второй и третий ключи, первые входы которых соединены с выходом интегратора, выход второго кл10ча соединен с вторым входом вто роге сумматора,второй вход второго ключа соединен с выходом первого ключа, вьfxoд третьего ключа соединен с вторым входом блока памяти, второй вход третьего ключа соединен с выходом компаратора, второй вход которого соединен с вы)одом фильтра, второй вход котброго соединен с вы- ходом объекта регулирования. Формирователь содержит делитель частоты и последовательно соединенные фазовый детектор, интегратор и управляемый генератор, выход которого соединен с входом делителя частоты и является выходом формирователя, выход делителя частоты соединен с входом фазового детектора, второй вход которого является входом форми;рователя. На фиг.1 представлена блок-схема устройства; на фиг.2 - конструктивное выполнение блока формирователи; на фиг.З - пример рабочей характеристики объекта регулирования. Система включает объект 1 регулирования, первый элемент задержки 2, первый инвертор 3 сумматор k, первый усилитель 5, интегратор 6, второй инвертор 7, первый пороговый элемент 8, второй пороговый элемент 9, второй усилитель 10, второй сумматор 11, блок 12 памяти, первый ключ 13 второй ключ 1,третий ключ 15, компаратор 16, второй элемент задержки 17, фильтр 18 и формирователь 19.
При этом формирователь (фиг.2| выполнен в виде фазового детектора 5 20, интегратора 21, управляемого генератора 22 и делителя 23 частоты.
Устройство работает следующим образом.
В период поиска экстремума Ю объекта 1 регулирования (система распознавания ) на него поступает входной сигнал x(t), характеризующий известный распознаваемый объект.
С выхода объекта 1 регулирования переменная величина напряжения д и -J у f (х) поступает на управляемой элемент задержки 2 и через щэемя л равное шагу отыскания 20 экстремума, на сумматор , одновременно не сумматор k поступает через первый инвертор 3 другое напряжение ли, характеризующее соседнюю ординату кривой экстремума.
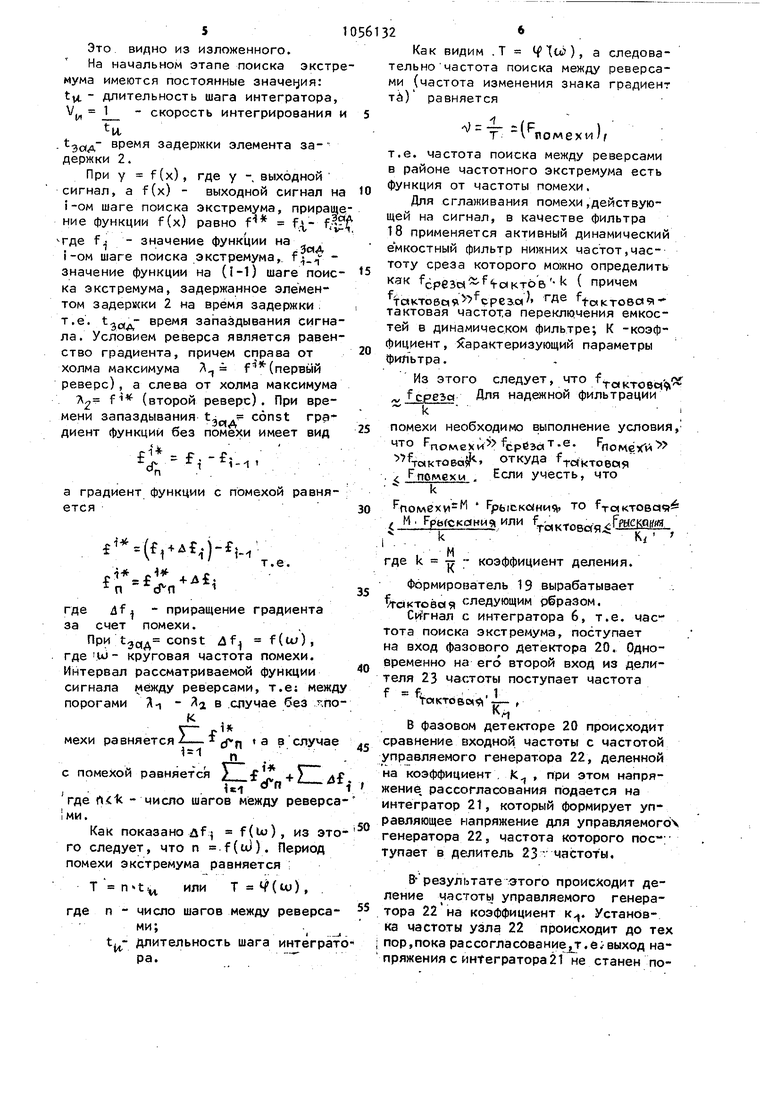
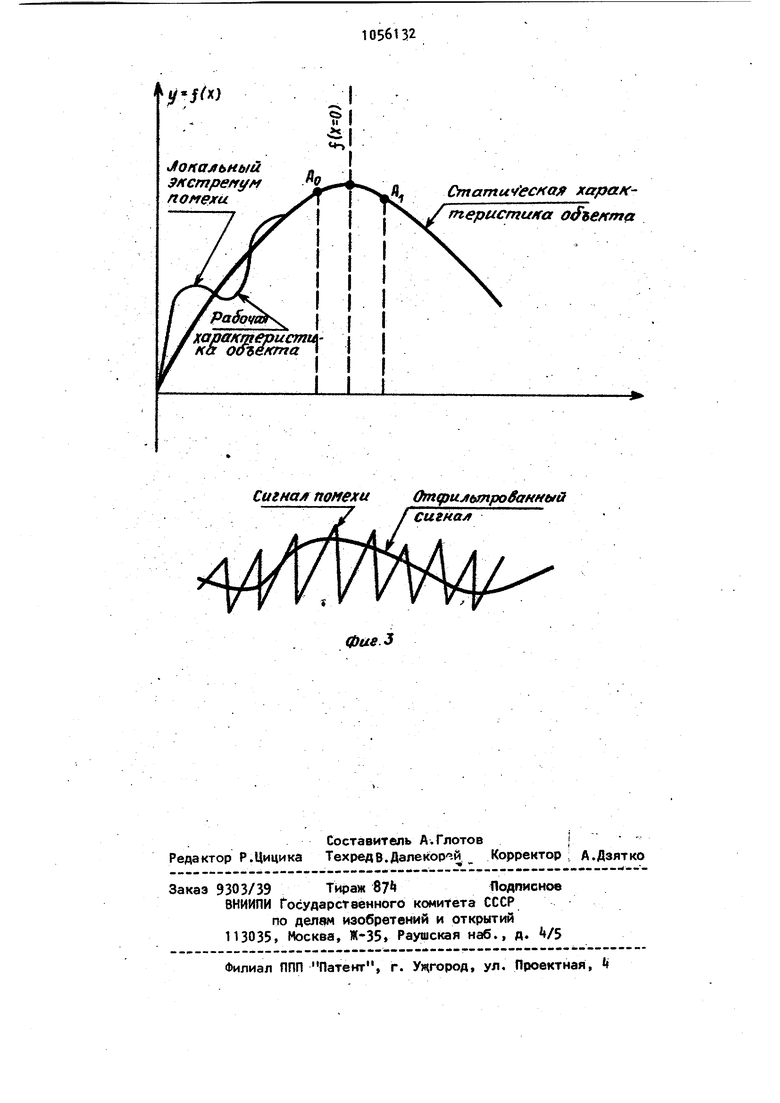
На выходе сумматора k формируемая еличина dUg l( л . t имеет положительное значение, в случае , если очередной шаг поиска экстремума находится на левой стороню холма 30 вероятности максимума и отрицательное значение, если шаг находится в правой .стороне максимума (фиг.З). Эти положительные или отрицательные значения поступают через усилитель 35 5 в интегратор 6, который изменяет состояние объекта 1 регулирования до тех пор пока изменение его выходного напряжения не будет наименьшей величино.40
Далее осуществляется более точный поиск экстремума за счет срабатывания пороговых элементов 8 и 9 при наименьших знамениях , при этом напряжение AUj из сумматора k поступает на первый усилитель 5 и с него через второй инвертор 7 на второй пороговый элемент 9 в случае отрицательного значения Л УЗ случае положительного значения сразу 50 на первый пороговый элемент 8. С выхода пороговых элементов 8 и 9 этот сигнал поступает На управляемый элемент задержки 2, который изменяет время поступления (dt) входного 55 сигнала ди на первый сумматор k, при этом изменяется шаг поиска экстремума , что позволяет сравнивать
более точно между собой ординаты, т.е.С сумматора будут выдаваться значения Л Поболее близкие к нулю, а вершина холма носила бы характер близкий к прямой линии,т.е. устройство работало бы в режиме насыщения, при этом напряжение на выходе объект 1 регулирования будет близкое некоторому установившемуся постоянному уровню ли„ const, разное для каждого отдельного Случая.
Велич151на установки пороговых элементов 8 и Э адаптивно меняется с помощью обратной связи, включающей
второй усилитель 10, второй сумматор 11, блока t2 памяти, первый 13, второй 1 и третий 15 ключи и с помощью блоков определения реверса, включающих компаратор (напряжения 16, второй элемент задержки 17, фильтр 18 и Формирователь 19.
До того как сработают пороговые элементы 8 и 9 вступает в .работу перестраиваемый с помощью формирователя 19 ф4льтр 18, который выделяет отфильтрованный сигнал от помехи, предупреждая ложный реверс от экстремума высокочастотных составляющих а«гнала (помех I.
льтр 18 перестраивается на Соответствующую частоту помехи, которая является функцией частоты изменения знака градиента сигнала на выходе интегратора 6, сигнал С ко торого поступает на формирователь 19, а с него на фильтр 18.
Форкмрователь 19 преобразует частоту рыскания в частоту, кратную частоте сигнала, а в данном случае кратную частоте помехи сигнала, вызвавшей этот частотный макс1тум, в результате фильтр 18 перестраивается .на основе частоты изменения знака градиента так, чтобы отфильтровать помехи сигнала.
Частота изменения знака градиента связана с частотой сигнала помехи, т.е. F S.MF
. , помехиpblCkOHM
noMfiVn частота сигнала помехи;
ьюкйния частота изменения
знака градиента;
И- коэффициент кратности между частотой помехи и частотой изменения знака градиента в районе местного экстремума. 5 Это видно из изложенного. На начальном этапе поиска экстр мума имеются постоянные значения: tvt длительность шага интегратора, Vj J - скорость интегрирования - зс«д- время задержки элемента задержки 2. При у f(x), где у -, выходной сигнал, а f(х) - выходной сигнал н i-ом шаге поиска экстремума, приращ ние функции f (х) равно f f где f,- - значение функции на- . , yCtA 1-ОМ шаге поиска экстремума,. i-i значение функции на (1-1) шаге поис ка экстремума, задержанное элементом задержки 2 на время задержки т.е. t3o(A запаздывания сигна ла. Условием реверса является равен ство градиента, причем справа от холма максимума / f (первый реверс), а слева от холма максимума f (второй реверс) . При времени запаздывания tj .- const градиент функций без помехи имеет вид градиент функции с помехой равня ется f(f.AC.)., . где 4f приращение градиента за счет помехи., При t,jc(A const 4f f(iu), где w- круговая частота помехи. Интервал рассматриваемой функции сигнала между реверсами, т.а; меж порогами Л-1 - 1 в случае пп мехи равняется-t- сГп случа с помехой равняется У f 4- / ,, cfnгде - число шагов реверс ми. Как показано juf f(t«), из эт го следует, что п .f(u). Период помехи экстремума равняется ; Т n-t или Т (w), где п - число шагов между реверса ми; t,.- длительность шага интегра 2 Как видим .Т Ч (д ), а следовательночастота поиска между реверсами (частота изменения знака градиент т) равняется V i.(F, - -fp 1 Т v помехи If т.е. частота поиска между реверсами в районе частотного экстремума есть функция от частоты помехи. Для сглаживания помехи.действующей на сигнал, в качестве фильтра 18 применяется активный динамический емкостный фильтр нижних частот,частоту среза которого можно определить как срезо(го1ктс в- ( причем сиктобая срез.а Д® tcaicToea - тактовая частота переключения емкостей в динамическом фильтре; К -коэффициент , 5(арактеризующий параметры фильтра. Из этого следует, что ., л/ f среза Для надежной фильтрации k помехи необходимо выполнение условия, что Рпо)лехи ЪреэаТ.е. Рпомехй TotKTOBa -. откуда f c | тo6aя помехи . Если учесть, что k помехи М Ррыскания О тактова (. l pbfCKciHH t или -дктоЕая I k . . Ki где k -jT ; коэффициент деления. ФормироЕзатель 19 вырабатывает тактовая следующим рбразом. С(гнал с интегратора 6, т.е. частота поиска экстремума, поступает на вход фазового детектора 20. Одновременно на его второй вход из делителя 23 частоты поступает частота -Р 1 акговаа - К В фазовом детекторе 20 происходит сравнение входной частоты с частотой управляемого генератора 22, деленной на коэффициент , k , при этом напряжение, рассогласования подается на интегратор 21, который формирует управляющее напряжение для управляемогоч генератора 22, частота которого пос-; тупает в делитель 23 частоты. В-результате отого происходит деление частоты управляемого генератора 22 на коэффициент к. Установка частоты узла 22 происходит до тех пор,пока paccoглacoвaниeJ,т.e;-выxoд напряжения с интегратора 21 не станен постоянной величиной. С выхода узла формирователя 19 частота f-rc(Kroeo( поступает в фильтр 18, вследствие го последний изменяет свою частотную характеристику таким образом, чтобы отфильтровать от помехи сигнал, поступаемый с выхода объекта управления. После фильтра 18 сглаженный сигнал (характеризующий гладкую функцию рабочей характерис ки) через второй элемент задержки поступает на неинвертирущий вход компаратора 16, а на инвертирующий вход этот же сигнал поступает сразу. В случае если на инвертирующем входе компаратора 16 всегда напряжение больше напряжен1;1я на выходе элемента задержки 17 (т.е. имеет место нарастание напряжения, то на выходе компаратора 16 отрицател ное напряжение. Если напряжение на выходе второ го элемента задержки 17 выше, чем текущее значение напряжения сигнала (т.е. происходит спад напряжени на входе схемы, что имеет место пр реверсе),то на выходе компаратора будет положительный сигнал, при этом при переходе напряжения из от рицательного в положительное н вы ходе компаратора сигнал ; (напряжени будет соответствовать максимально возможному значению. Таким образом, при истинном реверее (точки А, и Д фиг.З), т.е. в момент изменения знака сигнала компаратором 1б выдаются разнополя ные импульсь. В одном случае (точк А фиг.З) напряжение с компаратора (16 поступает на диод соответствующей полярности третьего ключа 15. вследствие чего он срабатывает и пропускает напряжение ):(t ) с интегратора 6 в блок 12 памяти. В другом случае напряжение момпаратора другой полярности с компара- ; тора 16 поступает на диод первого ключа 13 соответствующей полярности этого напряжения. Вспедст.вие этого напряжение проходит первый ключ 13 и поступает в виде команды в блок 12 памяти, по которой выдается заполненная величина U(tд) на второй сумматор 11, одновременно команда (напряжение) с первого ключа 13 поступает на второй ключ 1 , вследствие чего ключ 1 открывается и пропускает напряжение U)2(Ay интегратора 6, которое проходит затем инвертор этого блока 14 и поступает на другой вход второго сумматора 11. Как видно в четном такте пооисходит подача двух значений сигнала интегратора U:5t(A) и второй сумматор 11,. с выхода которого его результирующая величина ди U . А выдается во второй усилитель 10, который выдает сигнал наизменение установки первого 8 и второго 9 пороговых элементов. При достижении oптимaJ ьнoй величины экстремума значение приращений 40j и,-,- Ufj будет стремиться к минимальному значению, а амплитуда автоколебаний будет иметь минимальную величину. Выполнение системы экстремального регулирования указанным образцом позволяет существенно повысить точность регулирования объекта даже в том случае, когда закон изменяющихся воздействий объекта регулирования неизвестен.
фиг t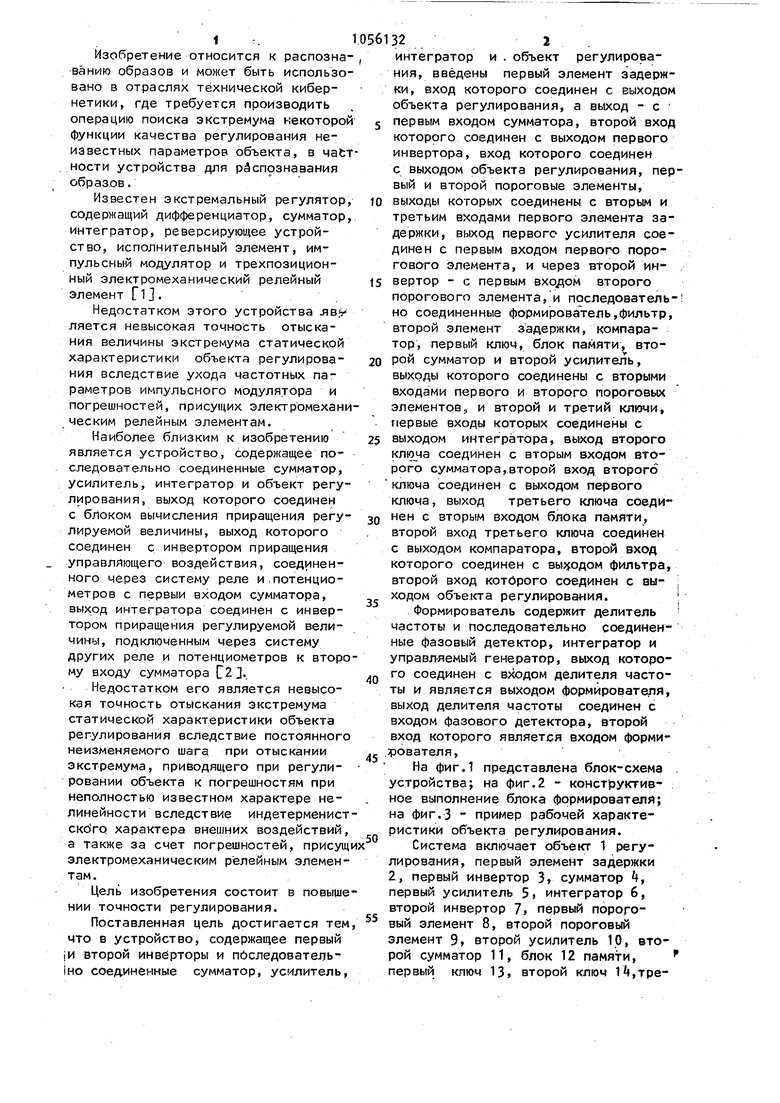
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для фильтрации помех в системе автоматического управления | 1978 |
|
SU938258A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Устройство автоматической фокусировки телевизионной камеры | 1988 |
|
SU1596483A1 |
| Система управления | 1983 |
|
SU1168896A1 |
| Устройство для измерения уровня радиопомех | 1987 |
|
SU1506396A1 |
| Устройство для автоматической настройки компенсации | 1987 |
|
SU1520626A1 |
| Устройство для определения частотных характеристик | 1979 |
|
SU911473A1 |
| ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОРВПТ БФ11 тшт | 1972 |
|
SU436327A1 |
| Измеритель шумов | 1990 |
|
SU1723535A1 |
| РАДИОЛУЧЕВОЙ ДАТЧИК ОХРАНЫ | 1992 |
|
RU2079889C1 |
20
2f
фие.
22
Сигнал помехи
Cmamufec/ a харакrnepucmu/(a o bCfrmct
Опкрилыпрованмьгй Cuiftajr
фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ сборки вагонных и тому подобных листовых рессор | 1940 |
|
SU58813A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получении шамота | 1936 |
|
SU52806A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
