( УСТРОЙСТВО для РЕГУЛИРОВАНИЯ КОЛЕБАНИЙ ВИБРОПЛОЩАДКМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU746417A1 |
| Способ поиска экстремума | 1978 |
|
SU744447A1 |
| Устройство для измерения параметров вибрации | 1987 |
|
SU1471084A1 |
| Устройство для регулирования частоты колебаний платформы | 1978 |
|
SU752254A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| ЦИФРОВОЙ АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР | 1968 |
|
SU212356A1 |
| Устройство для измерения параметров вибрации | 1981 |
|
SU949344A1 |
| Устройство для поиска экстремума | 1983 |
|
SU1091119A1 |
| Устройство для измерения вибрации и перемещений | 1989 |
|
SU1665235A2 |

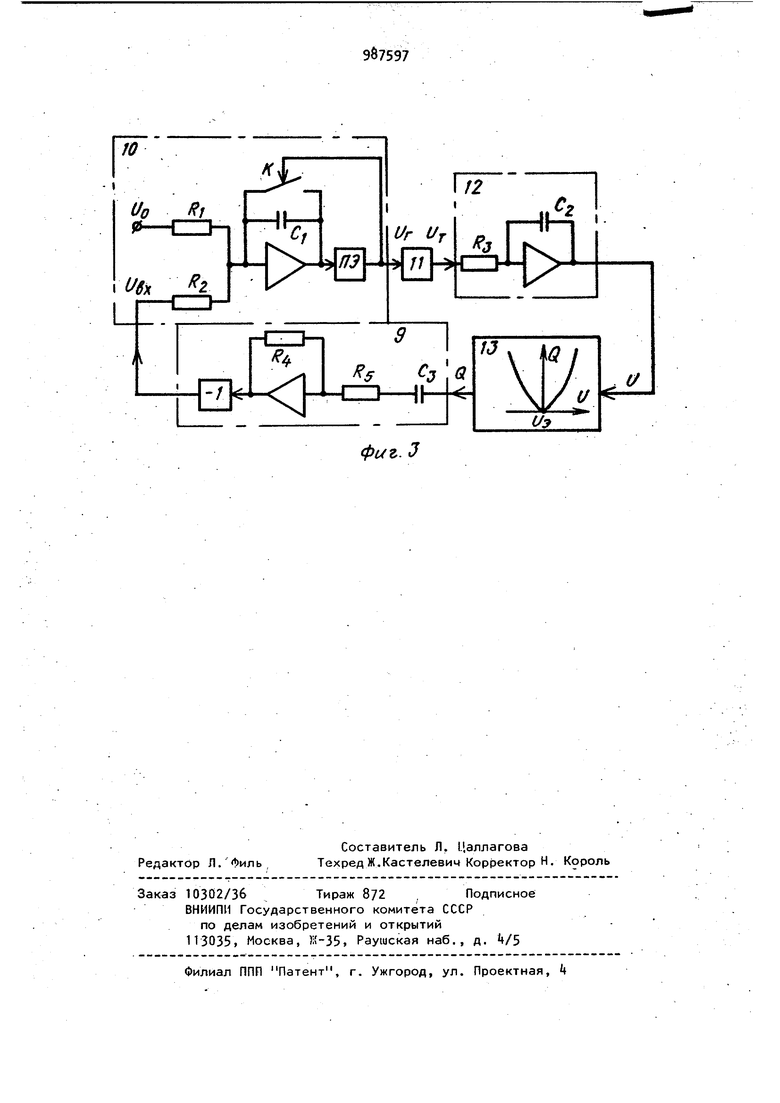
Изобретение относится к устройст-; вам автоматического управления механическими колебаниями и предназначено для использования в системах ав томатического управления вибрационными машинами технологического назмачения, в частности виброплощадками для уплотнения бетонных смесей. Известно устройство автоматического управления, в котором для обеспечения оптимального режима вибрации когда амплитуда колебаний рабочего органа вибромашины, осуществляющего вибрационное воздействие на обрабатываемую среду, максимальна, используется стабилизация разности фаз меж ДУ двумя знакопеременными сигналами. Этими сигналами являются сигнал виброперемещения, поступающий с датчика вибрации установленного на рабочем органе вибромашины,и сигнал угла по ворота дебаланса вибратора, поступающий с датчика угла поворота 1. Недостатком этого устройства является низкая точность поддержания экстремума амплитуды колебаний при увеличении, демпфирования колебательной системы и неравномерное распределение амплитуд колебаний в различных точках рабочего органа, обладающего несколькими степенями свободы, что объясняется косвенной оценкой оптимальности режима по сдвигу фаз между вынуждающей силой и виброперемещением. .Наиболее близким по технической сущности к предлагаемому является экстремальный регулятор, содержащий датчик вибрации, усилитель, генератор, блок вычисления амплитуды, одноканальный автоматический оптимизатор, выполненный в виде блока запоминания и вычисления с логическим элементом, блок форсированного выхода на экстремум и исполнительное устройство. Усилитель и блок вычисления амплитуды преобразуют знакопеременный сигнал виброперемещения в сигнал, являющийся критерием качества для автоматического оптимизатора. Блок формированного выход на экстремум позволяет производить широтно-импульсную модуляцию выходного сигнала логического элемента, Чем обеспечивается увеличение среднего значения скорости изменения выходной величины исполнительного устройства вдали от экстремума и уменьшение скорости по мере приближения к экстремуму 2. . Недостатком известного устройства является максимизация интенсивнос ти колебаний лишь в одной точке рабочего органа, что приводит к сниже нию точности равномерного распределения амплитуд колебаний по поверхности рабочего органа и неравномерному уплотнению бетонной смеси. Недостаток устройства объясняется тем что критерием качества вибрационного режима является амплитуда вибр перемещений, измеряемых датчикомвибрации лишь в одной точке виброплощадки, и невозможностью раздельного управления силовыми воздействиями в случае нескольких вибровозбудителей. Цель изобретения - повышение точ ности и расширение области применения устройства. Поставленная цель достигается.те что в устройство, содержащее первый вибродатчик, блок выделения огибающей и исполнительный орган, введены последовательно соединенные второй вибродатчик и сумматор, последовательно соединенные оптимизатор и преобразователь напряжения в частоту, а также блоки задержки, первые входы которых подключены к соответствующим вторым выходам оптими затора , а вторые входы - к выходу преобразователя напряжения в частоту, второй вход сумматора связан с выходом первого вибродатчика, а выход - с входом блока выделения ог бающей, выходом подключенного к вхо ду оптимизатора, причем выходы преобразователя напряжения в частоту и блоков задержки соединены с соответствующими входами исполнительного органа, а вибродатчики установле ны в противоположных углах виброплощадки . На фиг. 1 изображена блок-схема устройства;.на фиг. 2 - функциональ 74 ная схема оптимизатора; на фиг. 3 структурная схема одноканальной системы автоматической оптимизации, поясняющая работу оптимизатора в слу-. чае поиска минимума критерия качества Q объекта оптимизации. Устройство содержит вибродатчики Ч 2 сумматор 2, блок 3 выделения огибающей, автоматический N-канальный оптимизатор t, преобразователь 5 напряжения в частоту ,блоки 6 управляемой задержки, исполнительный орган - силовой преобразователь.7, виброплощадку 8. Кроме того, на фиг.1 обозначено V-j, V2 - сигналы датчиков вибрации; V - выходной сигнал сумматора; А - выходной сигнал блока вычисления амплитуды; , Uj, UNвыходные сигналы оптимиf - выходной сигнал преобзатора; . разователя напряжения в частоту; я| f3 N выходные с игналы блоКОВ управляемой задержки; г, г,,.., силовые воздействия. Устройство РП содержит также формирователь 9 сигнала производной, пороговые генераторы 10,vi триггеры 11-,N со счетными входами, интеграторы объект 13 оптимизации. На фиг. 2 и 3 обозначено выходной сигнал формирователя; DO - опорный сигнал; выходной сигнал генератора; выходной сигнал триггера. Виброперемещение каждой точки жесткой виброплош.адки определяется по формуле V (t,x,y)Z(t)- 4(t)(x-;))(y-yp), где Z(t) - вертикальное поступательное перемещение; 4(t/,V(t)- углы поворота относительно продольной и поперечной осей; х,у - координатЬ1 точки в прямоугольной системе координат , начало которой совпадает, с одним из углов .виброплощадки; Хр,Уд- координаты центра тяжести;t - время. Основную гармонику виброперемещения V(t,Xjy) как сумму синусоид выразим следующим образом; V(t,x,y)a(x,y) sin u) t, где w - частота колебаний; /tf(X,V)|- амплитуда. Интегральный критерий интенсивности колебаний, учитывая малость изменения частоты в резонансной зоне примет следующий вид: (X, axd- , где X, у - длин и ширина виброплощадки , и определяет сумму квадратов ампли туд по всем точкам виброплощадки и хакрактеризует суммарную интенсивность колебаний. Интегральный крит рий равномерности распределения ам плитуд колебаний Р имеет вид: X у a-«(x,:/)2dxdv, (x,i)olx dvР характеризует распределение ампл туд колебаний по поверхности вибро щадки, так как является интегралом квадрата разности между средним зн чением а по всей поверхности и зна чением а в точке (х,у). Р неположи телен и в случае равномерного расп деления достигает максимума равног О, так как при этом a(x,y)const. При распределении амплитуд, отличн от равномерного (меньше 0), Р опре деляет интегральную ошибку равноме ного распределения. Критерий качества S выбираем в виде суммы S и -«-Р . ; и после преобразования получим Colo,o)4a(x,:/) tc«U.o) + c«(o,:s) Сумма а с точностью до знака есть амплитуда А сумарного сигнала в двух противоположных угловых точках вибро площадки. Следовательно как х, у const то максимизация А обеспечивает максимизацию S, В качестве критерия качества виброплощадки достаточно взять амплитуду суммарного сигнала виброперемеще7«НИИ 8 двух противоположных углах виброплощадки . Система автоматической оптимизации работает следующим образом фиг.З) . Пороговый генератор 10 представляет собой интегратор со сбросом, последовательно соединенный с пороговым элементом ПЭ. Частота выходных импульсов блока 10 пропорциональна сумме сигналов UQ и Ug. После срабатывания ПЭ конденсатор С разряжается через управляемый ключ К, и интегратор возвращается в исходное состояние. Импульс с выхода блока 10 замыкает ключ и одновременно перебрасывает триггер 11 в новое состояний. Напряжение U на выходе триггера принимает значения i 1, Выходной сигнал блока 11 поступает на вход интегратора 12, формирующего управляющее воздействие и. На выходе объекта 13 имеет вели tHHy Q, которая поступает на вход формирователя 9. Формирователь 9 предназначен для фильтрации постоянной составляющей выходного сигнала объекта и создания необходимого для ра- . боты системы фазового сдвига Л Он выполнен в виде дифференциатора с коэффициентом усиления JU. . Пусть в начальный момент времени t,. U U 3 и Uf -и. Выходная величина объекта 6 при этом уменьшается и . Uо выбирается из условия U( всегда льше 0. В момент времени t. на выходе блока 10 формируется импульс, перебрасывающий триггер. .11 в новое состояние и 1цзультате этого U меняет знак. Э момент t формируется новый импульс на выходе блока 10. Разность t о больше tj- t, так как первом случае меньше, чем во втором. За время tg, называемое периодом пробного воздействия, U увеличиваетm /ni I 4- на величину ся на величину 1 О 2/ приближается к экстремуму. Изменение и за период пробного воздействия определяется величиной - и после окончания процесса поиска становится равным О.. Система переходит в режим автоколебаний около экстремального значения Ug. При поиске максимума отпадает необходимость в инверторе формирователя 9 и работа системы полностью аналогична. Многоканальный оптимизатор |фиг.2) отличается одновременным функционированием N каналов из пороговых генераторов 10, триггеров 11 и интеграто ров 12. Периоды пробных воздействий по каждому из каналов выбираются раз личными. Уравнения для изменений сре них значений управляющих воздействий выходных сигналов оптимизатора определяются по формуле 0;..,,,,aQ. l-EZ,. КРИ J#t / )l -щ X соь|д(А),.- д + VjjJ, где W(j,UJ)- передаточная функция линейной части объекта оптимизации; P(u)) Re W(juJ)J-, Ли1,. )- i ,h-- соответственно частота начальная фаза и амплитуда пробного воздействия i-ro канала; сдвиг фаз в линейной части объекта оптимизации. Средние значения каждой из коррдинат изменяются согласно градиенту экстремальной характеристики объекта.. Устройство автоматического управления жесткой виброплощадкой (фиг.1) работает следукйцим образом. В начальный момент времени частота импульсов выходного сигнала f преобразователя 5 напряжения в часто ту пропорциональна величине входного сигнала и определяется начальным значением напряжения U/( на первом вы ходе оптимизатора . Импyльcыf с выхода блока 5 поступают на соответствующие вторые входы (N-1) блоков 6 .задержки. На первые входы блоков 6 поступают сигналы соответственно и„, U4,...Um остальных (Н-1) выходов оптимизатора . Каждый блок управляемой задержки состоит из 1К-триггера выполняющего функцию расширителя им.пульсов; генератора линейно изменяющегося напряжения и сравнивающего устройства, одновременно являющегося формирователем выходного сиг- нала. Второй вход блока является I-входом триггера, а первый - вторым входом устройства сравнения, на первый вход которого поступает выходной сигнал генератора линейно изменяющегося напряжения, входным сигналом которого является выходное напряжение 1К-григгера. Выходной импульс блока, поступающий на К-вход триггера, перебрасывает его в исходное состояние. Выходные импульсы блоков 6 имеют одинаковую частоту |эавную частоте сигнала f , и запаздывают на величины времени, пропорциональные сигналам, поступавшим на первые входы блоков 6. Задержки импульсов в начальный момент определятся начальными напряжениями и„, U,..., U|g. Начальные напряжения на выходах оптимизатора Ц не имеют принципиального значения для работы системы, так как оптимизатор обесп(рчивает поиск экстремума входного сигнала во есем диапазоне изменений выходных напряжений. Сигналы fx, ...,fn поступают на соответствующие входы силового преобразователя 7 виброплощадки, преобразующего N входных последовательностей входных импульсов в периодические силовые воздействия F, Fn t.. . t FKI с частотой и сдвигами йаз , 2 fj .UK,. В определяемыми качест-t, U2i ве силового преобразователя 7 может быть, например, тиристорный блок питания электромагнитных еибровозбудителей. Силовые воздействия при неизменных Ux, и,. .., Ufv) определяются следующим образом с учетом малости резрнансной обизменения частоты в ласти: F ( e J ; F,, CnSinCU t t f + Un) ; - ( + амплитуда i-ro силового воздействия;S- - сдвиг фаз, вносимый преобразователем. Силовые воздействия вызывают вынужденные колебания виброплощадки 8, которые преобразуются вибродатчиками 1, установленными на противоположных углах виброплощадки, в периодические знакопеременные сигналы V , Vj. Преобразователь напряжения в частоту, блоки управляемой задержки, силовой преобразователь, виброплощадка вместе с датчиками вибрации и сумматор вместе с блоком вычисления амплиту- ды являются объектом оптимизации для автоматического оптимизатора Ц. Сигналы V и /2 поступают на сумматор 2, выходной сигнал которого V есть знакопеременный периодический сигнал, поступающий на вход блока 3 выделения огибающей. Выходной сигнал А блока 3 пропорционален амплитуде суммарного виброперемещения. Блоки 2 и 3 являются формирователями критерия качества для оптимизатора . Наибольшая частота пробных воздействий оптимизатора выбирается заведомо много меньшей частоты колебаний виброплощадки. Оптимизатор Ц осу ществляет непрерывные пробные измене- 5 Ния напряжений на всех N выходах одновременно с различными частотами. Пробные изменения U.,, Un, ...Uf преобразуются блоками 5 и Ь и силовым преобразователем в изменения частоты 20
и сдвигов фаз силовых воздействий
F-) Р этом изменяется частота и амплитуды колебаний в угловых точках виброплощадки 8, что фиксируется датчиками 1. В результате этого изменяется сигнал А. Под воздействием непрерывных изменений и , Un,. . . ,U(yj величина А изменяется согласно градиенту экстремальной характеристикой объекта оптимизации, т.е.скорость изменения выходного сигнала оптимизатора пропорциональна частной производной экстремальной характеристики по этому сигналу, а направление изменения соответствует увеличению А. Сигнал А возрастает до тех пор, пока не будет достигнута окрестность максимума экстремальной характеристики, после чего в системе возникают колебания, не выходящие за пределы этой окрестности. Так как оптимизация А обеспечивает максимизацию критерия качества S , то таким образом обеспечиваетс поиск и поддержание критерия S на максимальном уровне.
Оптимизация критерия, являющегося суммой показателя интенсивности колебаний и равномерности распределения амплитуд колебаний, при помощи общего управления частотой и раздельного управления сдвигами фаз силовых воздействий виброплощадки позволяет производить поиск и поддерживать колебания виброплощадки с большей суммарной мощностью и меньшей ошибко равномерного распределения амплитуд колебаний, что в конечном счете повычена в 1,2-1,5 раза.
Формула изобретения
Устройство для регулирования колебаний виброплощадки, содержащее первый вибродатчик, блок выделения огибающей и исполнительный орган, отличающееся тем, что, с целью повышения точности и расширени области его применения, оно содержит последовательно соединенные второй вибродатчик и сумматор, последовательно соединенные оптимизатор и преобразователь напряжения в частоту, а также блоки задержки, первые входы которых подключены к соответствующим вторым выходам оптимизатора а вторые входы - к выходу преобразователя напряжения в частоту, второ вход сумматора связан с выходом первого вибродатчика, а выход - с входом блока выделения огибающей, выходом подключенного к входу оптимизатора, причем выходы преобразователя напряжения в частоту и блоков задержки соединены с соответствующими входами исполнительного органа, а вибродатчики установлены в противоположных углах виброплощадки.
Источники информации, принятые во внимание при экспертизе
Vf
г
j
Г4
.J
//v
фиг f
«e.2
. J
