Изобретение относится к устройствам пнввмогидроавтоматики и может быть использовано в манипуляционных роботах.
Известны обратимые следящие системы, содержащие задающий и исполнительный органы, канал слежения по положению задающего органа и обратный канал отражения усилия. Каждый канал содержит по два датчика соответственно/углов и моментов, элемент сравнения, два усилителя, два привода.1. Недостатком схемы является наличие большого числа линий связи.
Известна также обратимая следящая система,содержащая задающий и исполнительный валы, каждай из которых взаимодействует с парой гидроприводов, два усилителя и блок сравнения, каждый гидропривод выполнен в виде, двух однополостных гидроцилиндров, поршневые полости которых соединены мелоду собой замкнутой гидравлической линией связи, при этом штоки первых гидроцилиндров каждой пары гидроприводов кинематически соединены с задающим и исполнительным валами, обеспечивающими разнонаправленное перемещение указанных штоков, а блок сравнения содержит два привода и вал кинематически связанный, с тремя рейками, противоположные концы двух из которых жестко соединены со штоками вторых гидроцилиндров каждой пары гидроприводов, а каждый из противоположных концов .третьей рейки жестко соединен со штоком соответствующего привода, причем вход каждого из усилителей соединен с гидросистемой соответствующего гидропривода задающего органа, а вйход - с входом соответствующего привода {2.
К недостаткам известной системы следует отнести наличие большого числа кинематических связей, ухуд. шающих точность системы.
Целью изобретения является повышение точности системы.
Указанная цель достигается тем, что в обратимой гидравлической следящей системе, содержащей задающий и исполнительный валы, усилители, два гидропривода, состоящих из двух однополостных гидроцилиндров, штоки которых кинематически соединены с зада1сацим и исполнительным валами, и блок сравнения, последний выполнен в виде гидрокинематического рычага, состоящего из корпуса, камера которого разделена на управляющие, торцевые и выходные полости пятью мембраной с различными эффективными площадями, причем эффективные площади каждой из крайних и средней мембран больше эффективной плогцади каждой из промежуточных. Iмембран, жесткие центры мембран .связаны между собой штоком, поршневые полости однополостных гидроцилиндров задающего вала и входы усилителей связаны со средними управляющими полостями, выходные полости с поршневыми полостями однополостных гидроцилиндров исполнительного вала а торцевые полости - с выходами соответствующих усилителей.
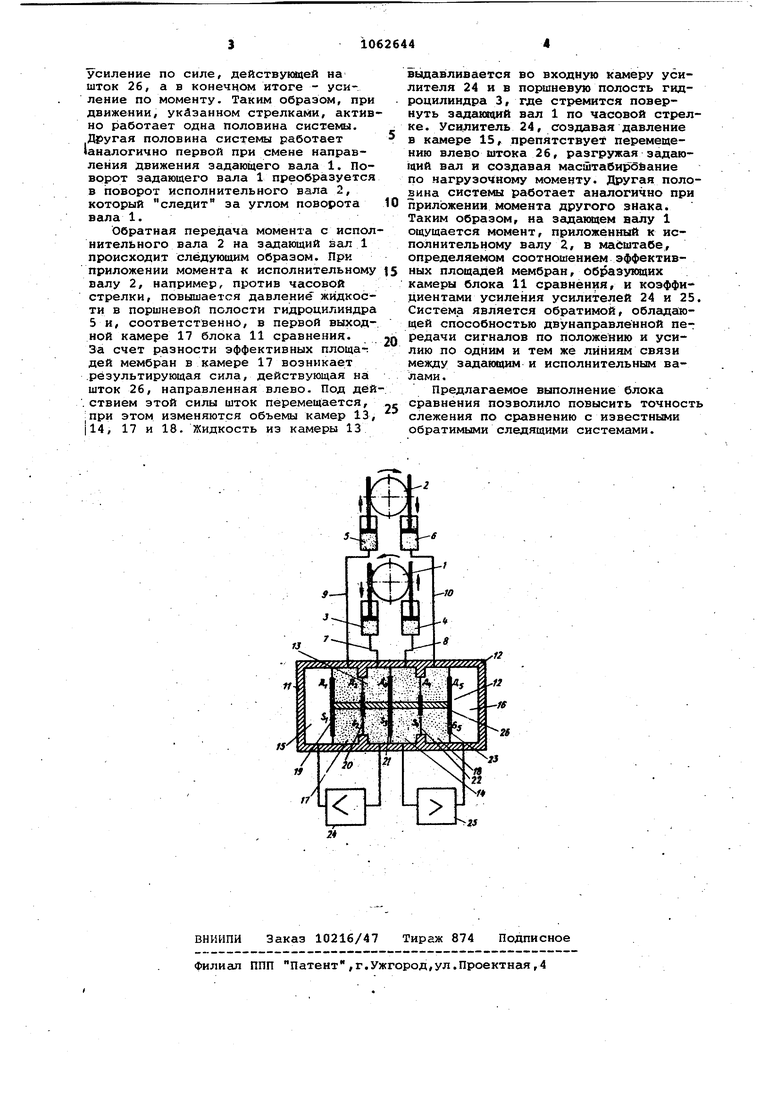
На чертеже приведена схема обратимой следящей системы.
Система состоит из задающего 1 Ц исполнительного 2 валов, кинематически связанных с гидроприводами, состоящими из однополостных гидроцилиндров 3-6, которые соединены замкнутыми гидравлическими линиями 7-10 связи с блоком 11 сравнения.
Блок 11 сравнения выполнен в виде гидрокинематического рычага, камера корпуса . 13 которого разделена на управляющие 13 и 14, торцевые 15 и 16 и выходные 17 и 18 полости пятью мембранами 19-23 с различными эффективными площадями. Причем эффективные площади каждой из мембран 19, 21 и 23 больше эффективной площади каждой из промежуточных мембран 20 и 22,
В систему входят также усилители 24 и 25 , входы и выходы которых подключены соответственно к полостям 13,14 и 15, 16. Полости цилиндров 5 и 6 соединены соотвотственно с полостями 17и18, аЗи4-с полостями 13 и 14 мембраны связаны штоком 26.
Система работает следующим образом.
При приложении момента к задающему валу1, например, против часовой стрелки, как показано на чертеже, давление жидкости в поршневой полости гидроцилиндра, 3, в управляющей камере 13 блока 11 сравнения и управляющей камере усилителя 24 возрастает. За счет разности эффективных площадей мембран, образующих камеру 13 возникает результирующая сила, действующая на шток, направленная вправо. Под действием этой силы шток .перемещается. При его перемещении изменяются объемы камер 13, 14, 17 и 18 за счет разности эффективных площадей мембран. Причем, объемы камер 13 и 18 возрастают, а камер 14 и 17 - уменьшаются. При этом жидкость выдавливается из камеры 17 в поршневую полость гидроцилиндра 5, Шток гидроцилиндра 5 перемещается Вверх и приводит в движение исполнительный вал 2. Жидкость из поршневых полостей гидроцилиндров 3 и 6 перетекает в камеры 13 и 18 блока 11 сравнения. Увеличении давления в камере 13 блока 11 сравнения отрабатывает усилитель 24, в результате повышается давление в камере 15 блока 11 сравнения. Этим осуществляется
усиление по силе, действующей на шток 26, а в конечном итоге - усиление по моменту. Таким образом, при движении, укйэаином стрелками, актив но работает одна половина системы. Другая половина системы работает 5 аналогично первой при смене направления движения задающего вала 1. Поворот задающего вала 1 преобразуется в поворот исполнительного вала 2, который следит за углом поворота 10 вала 1.
Обратная передача момента с исполнительного вала 2 на задающий вал 1 происходит следующим образом. При приложении момента к исполнительному J5 валу 2, например, против часовой стрелки, повышается давлениё жидкости в поршневой полости гидроцилиндра 5 и, соответственно, в первой выход-. ной камере 17 блока 11 сравнения. уп За счет разности эффективных площа-г дей мембран в камере 17 возникает результирующая сила, действующая на шток 26, направленная влево. Под действием этой силы шток перемещается, При этом изменяются объемы камер 13, 14, 17 и 18, Жидкость из камеры 13
ВЕЗдавливается во входную камеру усилителя 24 и в поршневую полость гидроцилиндра 3, где стремится повернуть задакжшй вал 1 по часовой стрелке. Усилитель 24, создавая давление в камере 15, препятствует перемещению влево штока 26, разгружая задающий вал и создавая масштабирбвание по нагрузочному моменту. Другая половина системы работает аналогично при приложении момента другого знака. Таким образом, на задающем валу 1 ощущается момент, приложенный к исполнительному валу 2, в ма(:;штабе, определяемом соотношением эффективных площадей мембран, образукааих камеры блока 11 сравнения, и коэффи.циентами усиления усилителей 24 и 25 Система является обратимой, обладающей способностью двунаправленной передачи сигналов по положению и усилию по одним и тем же линиям связи между задающим и исполнительным валами.
Предлагаемое выполнение блока сравнения позволило повысить точност слежения по сравнению с известными обратимыми следящими системами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Обратимая следящая система | 1980 |
|
SU935874A1 |
| Обратимая следящая система | 1982 |
|
SU1043590A2 |
| Машина для рытья траншей | 1979 |
|
SU829825A1 |
| Устройство для программного управления манипулятором | 1980 |
|
SU903812A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ ВИБРОСТЕНДА | 2017 |
|
RU2671928C1 |
| Обратимый следящий привод | 1981 |
|
SU1043368A1 |
| Блок комбинированных гидроприводов | 2018 |
|
RU2685115C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2006 |
|
RU2322618C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305211C2 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
ОБРАТИМАЯ ГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА, Содержащая задающий и исполнительный валы, усилители, два.гидропривода, состоящих из двух однополоетных гидроцилиндров, штоки которых кинематически соединены с задакадил и исполнительным ваГ: т1Ш 1,У «г гЛЙОТЕ ГЛ лами, и блок сравнения, о т л и чающаяся тем, что, с целью повышения точности, блок сравнения выполнен в виде гидрокинематического рычага, состоящего из корпуса, камера которого разделена на управляющие,- торцевые и выходные полости пятыо мембранами с различными эффективными площадями, причем эффективные площади .каждой из крайних и средней мембран больше эффективной площади Кс1ждой из промежуточных мембран, жесткие цен±ры мембран с;вязаны между собой штоком, поршневые полости однополостных гидроцилиндров задающего вала и входы усилителей связаны со средними управляющими полостями, выходные полости - с поршневыми (Л полостями.однополостных гидродилиндров исполнительного вала, а торцевые полости - с выходами соответствующих усилителей.
