л
со
vl
о
СП
Изобретение относится к судоподъему.
Известно судно для подъема затонувших объектов, содержащее корпус, на котором размерен силовой привод, кинематически связанный с грузонесущими секциями, имeюIди да головки и сочленяем ми одна с другой посредством стыковочных муфт, и имеющий верхние и нижние замки для захвата гругюнесущих секций, при этом верхние замки неподвижно укреплены на шахтах, смонтированных на корпусе суднз в его диаметральной плоскости l.
Однако судно имеет недостатки, заключающиеся в том, что величина массы каждой из подви:кных колонн с технологической площадкой, входит В поднимаемую массу подъемника, снижая тег.1 самг.лм на ту же величину возможную грузоподъемность подъемного устройства, а наличие надпалубного портала с высокоперемеЕцающейся колонной с технологической площадкой уменьшают остойчивость судна и тем самым надежность работы
Цель изобретения - повышение грузоподъемности и надежности работы судна.
Указанная цель достигается тем, что в судне для подъема затонувших объектов, содержащем корпус, на котором размещен силовой привод, кинематически связанный с грузонесуцими секциями, имеющими головки и сочленяемыми одна с другой посредством стыковочных муфт-, и имеющий верхние и нижние замки для захвата грузонесущих секций, при этом верхние замки неподвижно укреплены на шахтах, смонтированных на.корпус судна в его диаметральной плоскости силовой привод оборудован камерами, закрепленными на корпусе, снабженными трубопроводами и насосами -дх(я подачи в них воды, .а также понтонам снабженными балластной системой, траверсами и штангами, при этом понтоны размещены попарно в каждой из указанных камер, жестко соединены между собой траверсой и шарнирно связаны со штангами, которые пропущены через отверстия судна, цричем нижние концы штанг снабжены подхватами, на которых закреплены указанные нижние замки.
Кроме того, понтоны силового привода выполнены с.откидными тормозными щитками.
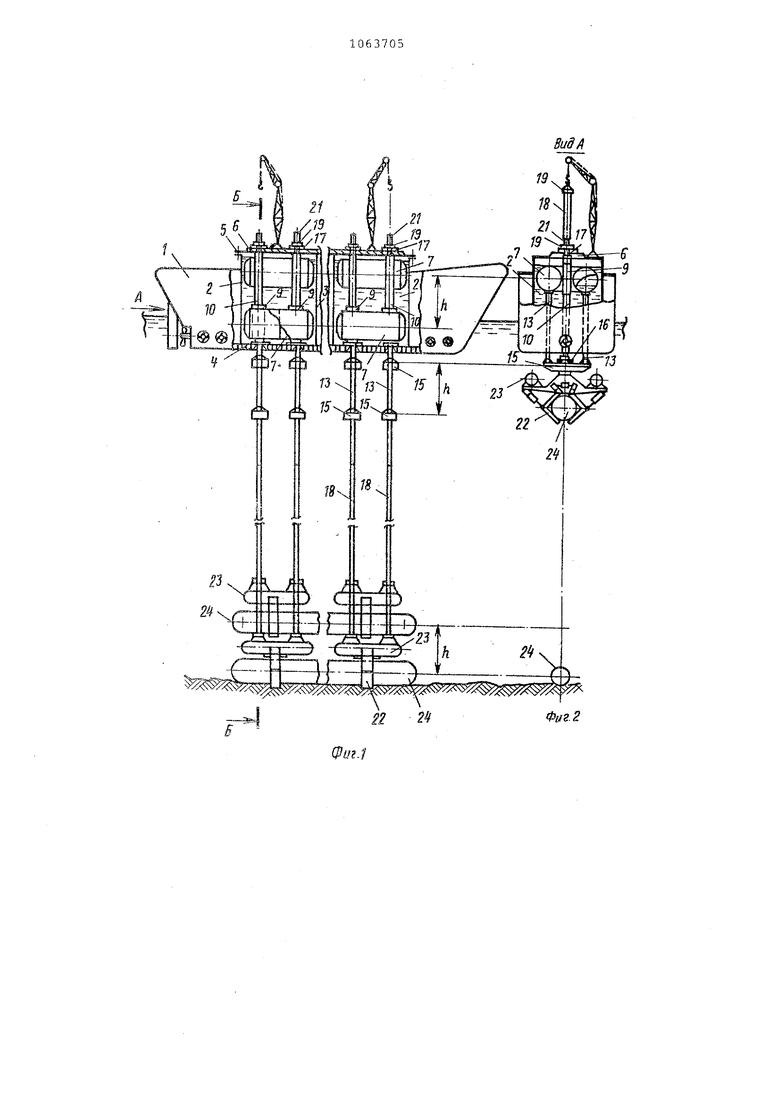
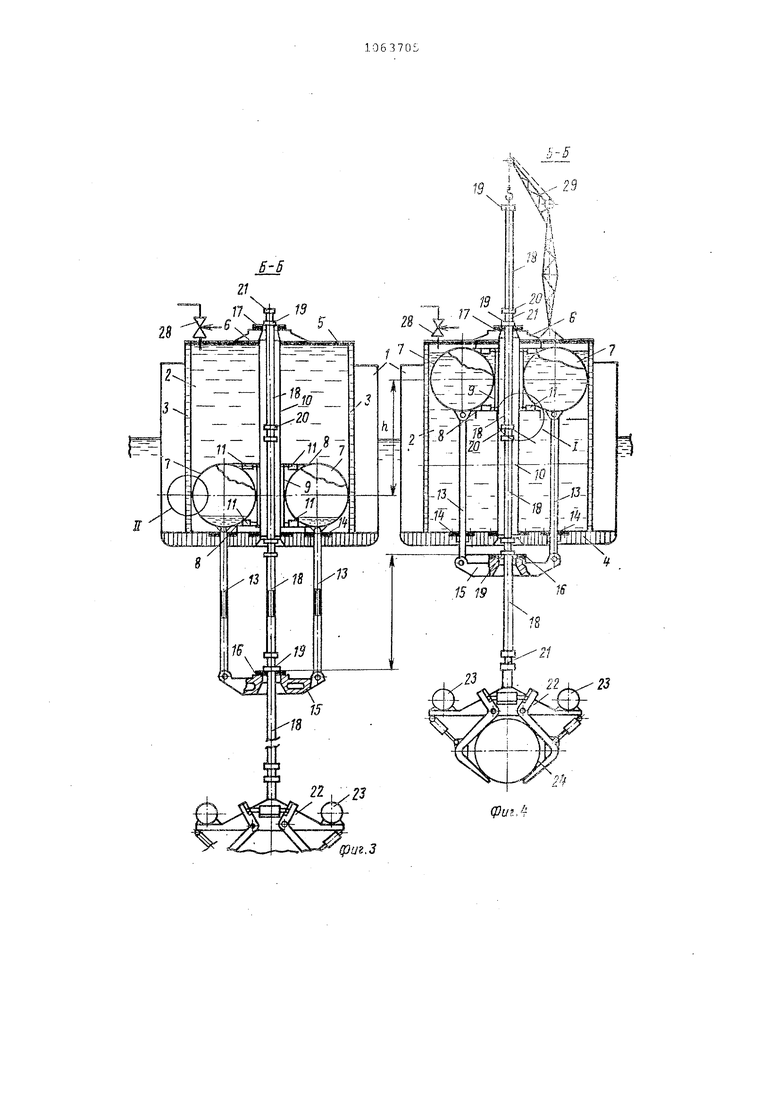
На фиг. 1 изображено понтЬнноподъемное судно (объект поднят на высоту h ) ; на фиг. 2 - вид по стрелке А на фиг. 1 (объект в транспортном положенииJ;на фиг. 3 разрез Б-Б на фиг. 1, крайнее нижнее положение устройства перед рабочим ходом вверх; на фиг. 4 - то же.
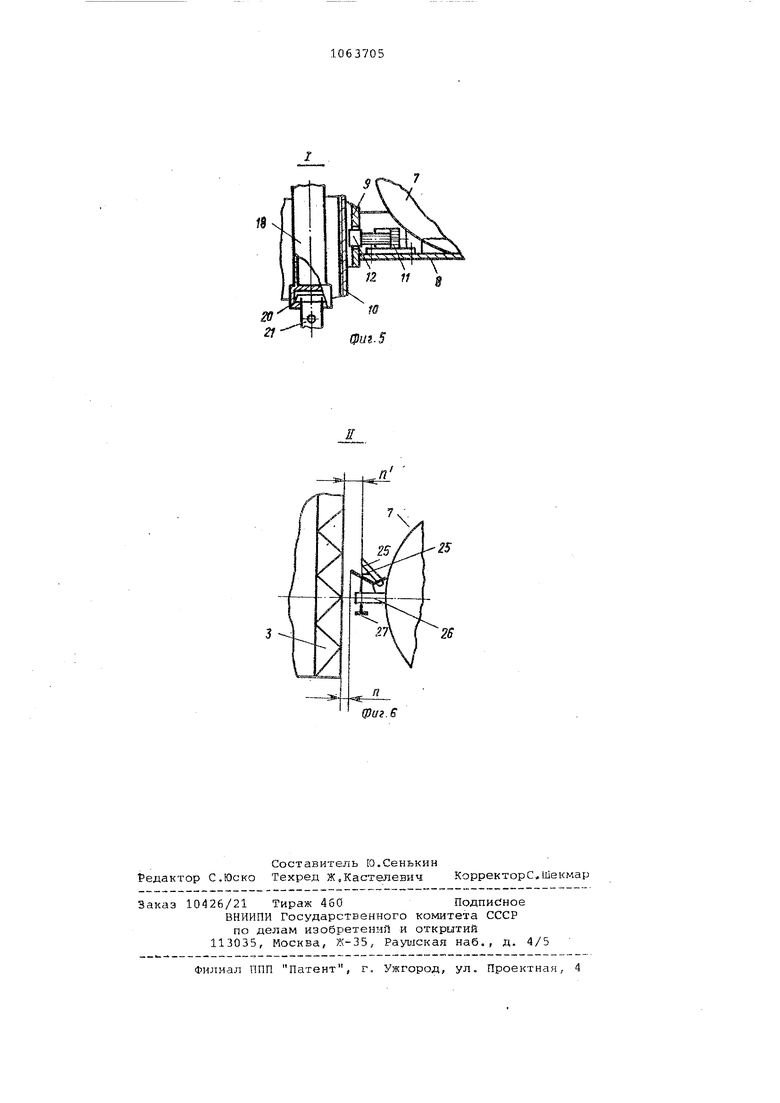
после поднятия объекта ззерх на высоту -ft и перед холостым ходом вниз, крайнее верхнее положение устройства; на фиг, 5 - узел I на фиг. 4; на фиг, 6 - узел II из. фиг. 3.
Судно для подъема затонувтиих объектов содержит корпус 1, в котором расположен силовой привод, выполненный в виде заполненных жидкостью камер 2. Каждая камера 2 содержит стенки 3, днище 4, перекрытие 5 и опорные подушки 6. Внутри камеры 2 (фиг. 3 и 4) парно размещены понтоны 7, жестко скрепленные между собой посредством траверсы 8 нейтральной плавучести и трубчатых направляющих 9, свободно перемещающихся по водоразделяющлм колоннам 10. На траверсах 8 (фиг. 5) установлены фиксаторы, состоящие ия гидроцилиндров 11 и стопорных секторов 12. Сигф етрично по отношению вертикальной оси направляющих 9 к нилчним поверхностям понтонов 7 парно-шарнирно подвешены штанги 13, свободно пропущенные через сквозные отверстия днища 4 камеры 2, с манжетами 14 и нижними шарнирно соединены с подхватами 15 нейтргшьной плавучестью, на которых размещены нижние подвижные опорные замки 16, а соосно с ними на опорных подушках б перекрытий 5 камер расположены верхние неподвижные замки 17. Внутри каждой колонны 10 размещены грузонесущие секции 18 с головками 19 и 20, соединенНЕле межд собор посредством стыковочных гугуфт 21. Головные секции 18 шарнирно соединены с захватными устройствами 22 которые снабжены поплавками 23 регулируемой плавучестью, поднимаемог объекта 24. Понтоны 7 по периметру снабжены откиднгми тормозными-щит-. ками 25 (фиг. 6J, шарнирно соединеннье с кронштейнами 26 с устаноз.ленными на них регулировочными болтами 27. Для регулирования количества дросселируемой жидкости в камере 2 предусмотрены трехходовые краны 28. Подъемный механизм снабжен вспомогательными кранами 29.
Судно для подъема затонувших объектов работает следующим образом.
Судно занимает место в одной точке над затонувшим объектом без постановки его на якорь.
В зависимости от глубины подъема поднимаемого объекта 24, его габаритов и массы с коэффициентом отрыва от грунта составл л тся при помощи: судовой ЭВМ программа Подъем, комплектуются подъемные плети из секций 18 с обозначениелМ их плавучести и последовательности стыковки . Понтоны 7 и камеры 2 заполняются жидкостью с наличием в них свободного пространства равного возможному объему жидкости в понтонах при их положении на дне камеры 2. Колонны 10 блокируются секторами 12. Под днище 4 и подхваты 15 при помощи водолазов подводятся захватные устройства 22 с поплавками 23 и посредством муфт 21 стыкуются с головными секциями 18, и придается необходимая отрицательная плавучесть захватного устройства, после чего при помощи вспомогательных кранов 29 производится подача и механическая стыковка наращивания подъемных плетей на всю глубину до поднимаемого объекта 24 при этом движители захватных устройств (не показаны) с гидроакустическим управлением для наведения на цель управляются телеоператором с пульта судна. Кроме того, аквана ты из подводного аппарата и водолазы из наблюдательных камер ведут контроль за сближением захватов 22 их стыковкой с объектом, .корректируют процесс подъема и работу замков 16.После того, как захватными рычагами произведен захват объекта 2 и зафиксирована датчиками надежность захвата, при разблокированны секторах 12, дается команда замкам 16 на блокировку головок 19, после чего из понтонов 7 путем продувки удаляется жидкость и они приобрета подъемную силу (фиг. З), поочерёд-. HbSM приложением усилий на подъемные плети производится отрыв объекта от грунта, горизонтирование и прямой его подъем на высоту .ji первого рабочего хода. При движении понтонов 7 вверх давлением жидкости щитки 25 откидываются фиг.6) с опорой на регулировочные болты 27, образуя по периметру понтонов минимальную, соответствующую скорости подъема, щель ti делая возможньом регулируемое торможение, при этом при помощи дроссельных кранов 28 в камерах 2- поддерживается соответствующий уровень жидкости., В конце рабочего хода понтонов 7 вверх верхние опорные замки 17 блокируют головки 19 секций 18, после чего открываются клапаны быстрого затопления понтонов. 7 и только после показания датчиков, что замки 17 восприняли на себя всю нагрузку, а замки 16 освободились от таковой, происходит их разблокировка, и подъемные плети оказываются на весу с опорой на заблокированные замки 17 (фиг. 4 ;, а понтоны 7 холостым ходом продолжают опускаться вниз на величину хода Ь с открытыгу1И замками 16. Потоком жидкости щитки 25 открываются на максимальный дросселирующий зазор п уменьшая сопротивление движени1э понтоно.в и увеличивая тем самым скорость холостого хода. В конце холостого хода понтонов 7 Вниз опорныезамки 16 по команде датчиков блокируют головки 19 очередных поднимаемых секций 18, после удаления жидкости из полостей понтонов 7 в начале их подъема, когда замки 16 воспримут на себя всю нагрузку, а по показателям датчиков нагрузка с замков 17 снята, они разблокируются, далее цикл повторяется до поднятия объекта в верхнее транспортное положение (фиг. 2). Предлагаемое изобретение позволит повысить грузоподъемность и надеж- ность работы устройства при бесступенчатом подъеме затонувших объектов. (раг,3 -. фтЛ 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема затонувших плавучих средств | 1979 |
|
SU867780A2 |
| Грузоподъемное судно катамаранного типа | 1977 |
|
SU885101A1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2062732C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2012 |
|
RU2479460C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА | 2001 |
|
RU2246421C2 |
| СПОСОБ СПАСЕНИЯ И ПОДЪЕМА СУДОВ И КОМПЛЕКС СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2299831C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312038C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА С МОРСКОГО ДНА | 2006 |
|
RU2312039C1 |
1. СУДНО ДЛЯ ЗАТОНУВШИХ ОБЪЕКТОВ, содержащее корпус на котором размещен силовой привод,. кинематически связанный с грузонесущими секциями, И14еющими головки и сочленяемыми одна с другой посредством стыковочных муфТт и имеющий верхние и нижние замки для захвата грузонесущих секций, при этом верхние замки неподвижно укреплены на шахтах, смонтированных на корпусе судна в его диаметральной плос-, кости, отличающееся тем, что, с целью повышения его грузоподъемности и надежности работы, сшювой привод Оборудован) камерами, закрепленными на корпусе, .снабженными трубопроводами и насосами для подачи в них воды, а таюхе понтонами, снабженными бал,ластноЯ системой, траверсами и штангами, при этом понтоны размете- ны попарно в каждой из указанных камер, жестко соединены между собой траверсой .и шарннрно связаны со штангами, которые пропущены через отверстия судна, причем нижние концы штанг снабжены подхватами j на которых закреплены i указанные нижние замки. 2. Судно по п. 1, отли(Л чающееся тем, что понтоны силового привода выполнены с откидными -тормозными щитками.