Изобретение относится к механизированным крепям очистных забоев, а именно к устройствам передвижения секций крепи.
. Известно устройство передвижения секции крепи, включающее гидродомкра размещенный на основании под опорным кронштейном, и тяги, шарнирно соединенные с домкратом и секцией конвейера ij .
Недостатком этого устройства является то, что при вдавливании крепи в почву опорный кронштейн постоянно контактирует с тягами как в цикле выдвижки, так и при нагружении. Gocле нескольких циклов,передвижки опор ный кронштейн основания зажимает тяги, конвейер наклоняется на завал, и выдвижка крепи и конвейера проектным способом скольжения становится невозможной.
Наиболее близким к предлагаемому является устройство для передвижения секций механизированной крепи, включающее гидродомкрат, размещенный на основании крепи и шарнирно связанный штоком с опорным кронштейном, на котором установлен ролик, а цилиндром - с тягами, имеющими продольные пазы и закрепленными на секции конвейера, направляющие, установленные посредством оси и упоров на тягах, и пластины, закрепленные на оси и гидродомкрате С2J.
Недостатком известного устройства является невысокая надежность рессор ных упругих направляющих. При большо количестве циклов нагружения рессорная направляющая теряет свои упругие свойства и не обеспечивает заданную траекторию движения контактирующего с ней ролика. При движении ролика по направляющей ее форма в зоне контакта с роликом перестает быть дугой окружности определенного радиуса. Направляющая в этой зоне выполаживается, а на других участках ее кривиз на увеличивается.
Кроме того, рессорные направляющие технологически сложны в изготовлении и дорогостоящи.
Цель изобретения - повышение надежности работы устройства посредством обеспечения постоянной траектории движения основания.
Поставленная цель достигается тем, что в устройстве для передвижения секций механизированной крепи, включающем гидродомкрат, размещенный на основании крепи и шарнирно связанный штоком с опорным кронштейном, на котором установлен ролик, а цилиндром г с тягами, имеющими продольные пазы и закрепленными на секции конвейера, направляющие, установленные посредстве оси и упоров на тягах, и пластины, закрепленные
на оси и гидродомкрате, направляющие выполнены в виде поворотных в вертикальной плоскости рычагов, шарнирно соединенных между собой, под углом вершина которого направлена в сторону ролика.
На фиг. 1 представлено устройстве, общий вид; на фиг.2,3 и 4 - схемы работы устройства.
На основании крепи 1 установлены опорньое кронштейны 2 с роликом 3 и гидродомкрат 4, состоящий из штока 5 и цилиндра 6. Шток 5 шарнирно соединен с кронштейном 2, а цилиндр б с тягами 7, которые соединены пальцами 8 с секцией конвейера 9. Тяги 7 выполнены с пазами 10 и 11, причем в пазах 10 размещена ось 12, а в пазах.11 - цапфы 13 гидродомкрата 4. На оси 12 установлены рычаги 14, шарнирно соединенные посредством осей 15 с рычагами 16. Рычаги образуют угол, вершина которого направлена в сторону ролика. Рычаги 16 шарнирно соединены с упорами 17, установленными в тягах 7. Ось 12 и цапфы 13 соединены посредством пластин 18, предотвращающих их взаимное перемещение.
Устройство передвижения секции механизированной крепи работает следующим .образом.
В период нагружения секции крепи и концентрации контактных давлений под забойной частью основания крепи 1 в условиях слабой почвы происходит его вдавливание и крен на забой. В это время ось 12 и цапфы 13 гидродомкрата 4 смещены в пазах 10 и 11 к забою.
Рычаги 14 и 16 находятся в выположенном состоянии, при котором угол между ними близок к 180- (фиг.2).
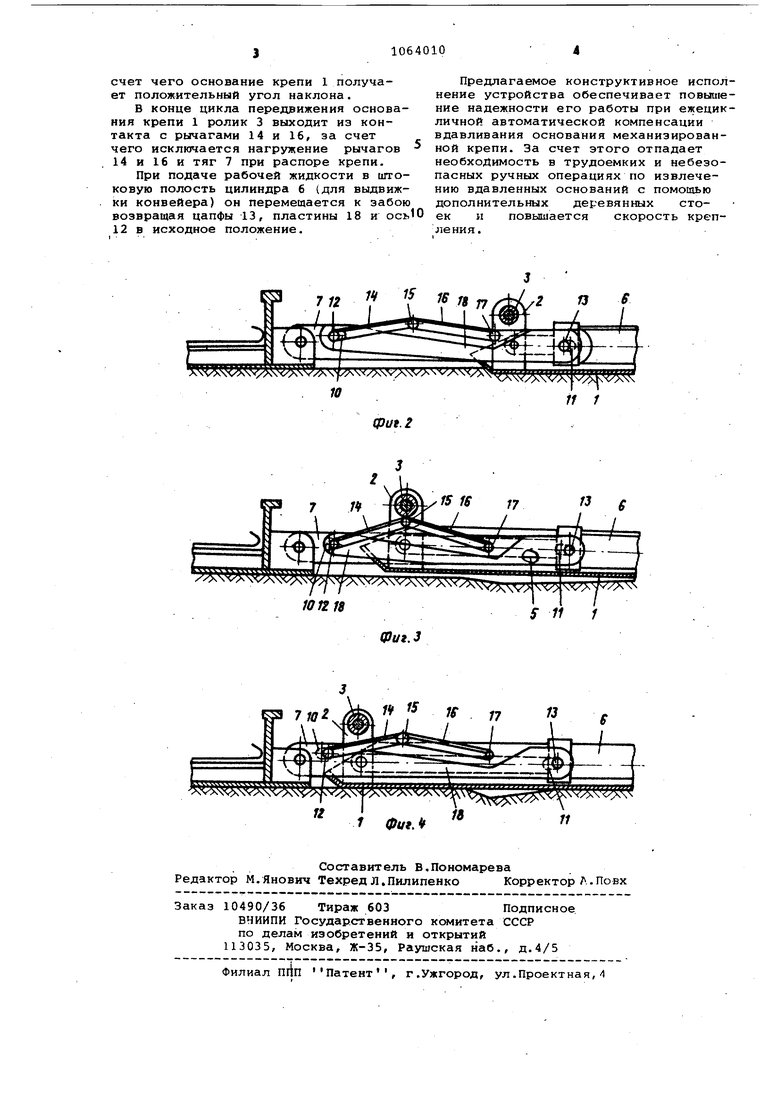
Для осуществления выдвижки секции крепи рабочая жидкость подается в поршневую полость цилиндра 6 гидродомкрата 4. При этом цилиндр 6 перемещается к завалу за счет скольжения цапф 13 в пазах 11 тяг 7. С цапфами 13 смещаются к завалу пластины 18, перемещая ось 12 вместе с рычагами 14. При своем перемещении рычаги 14 разворачиваются на оси.12 и за счет осей 15 поворачивают рычаги 16 относительно упоров 17. При взаимном относительном повороте рычагов 14 и 16 угол между ними уменьшаеся, а кривизна их общей поверхности, образующей траекторию для движения ролика 3, увеличивается.
При дальнейшем поступлении рабоче жидкости в поршневую полость цилиндра 6 гидродомкрата 4 вместе со штоком 5 выдвигается основание.
При движении ролика 3 по рычагам 14 и 1 происходит его подъем, за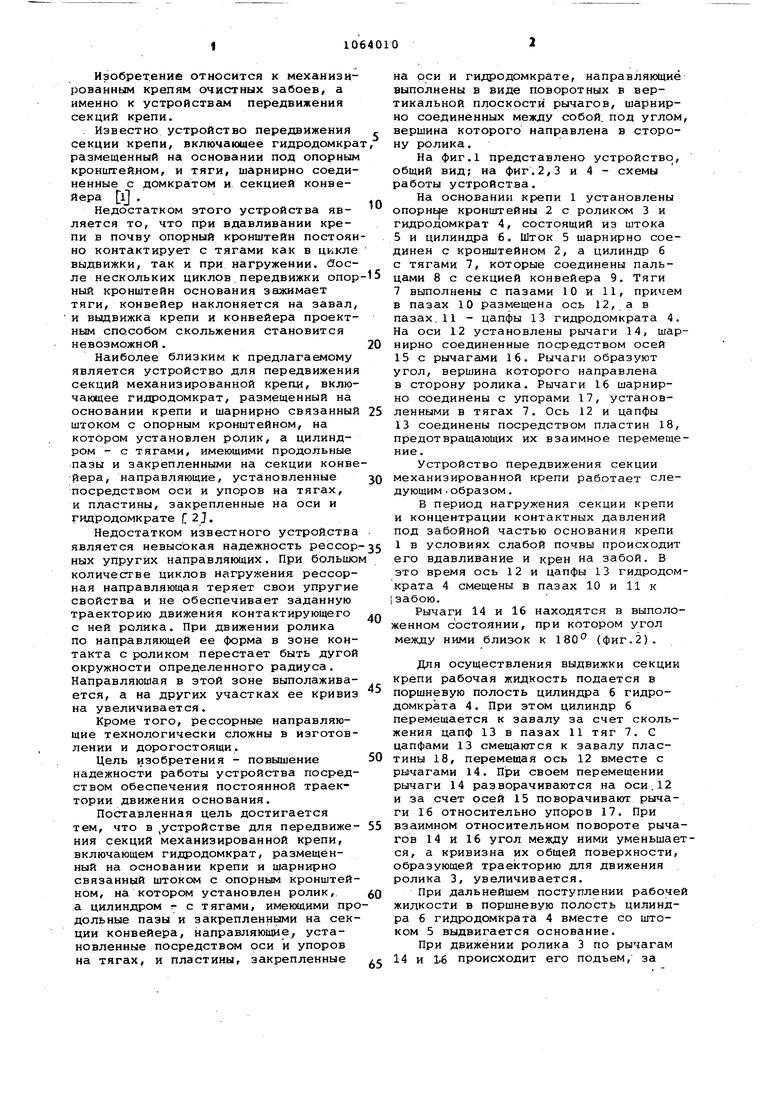
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для соединения механизированной крепи с конвейером | 1981 |
|
SU960445A1 |
| Устройство для передвижки основания секции механизированной крепи | 1985 |
|
SU1332033A1 |
| Устройство для передвижения секций механизированной крепи | 1984 |
|
SU1248354A2 |
| СПОСОБ КРЕПЛЕНИЯ И УПРАВЛЕНИЯ КРОВЛЕЙ В ОЧИСТНОМ ЗАБОЕ, КРЕПЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА, МЕХАНИЗМ ТЕЛЕСКОПИЧЕСКОЙ ЗАТЯЖКИ ЗАЗОРОВ ПО КРОВЛЕ И ЗАВАЛУ, СОЕДИНЕНИЕ ОСНОВАНИЙ СЕКЦИЙ, НАПРАВЛЯЮЩАЯ БАЛКА КРЕПИ, МЕХАНИЗМ РАСПОРА СЕКЦИЙ КРЕПИ, МЕХАНИЗМ СКЛАДЫВАНИЯ КРЕПИ, КОЗЫРЕК ПЕРЕКРЫТИЯ КРЕПИ | 2001 |
|
RU2200843C2 |
| Устройство для передвижения секции крепи | 1985 |
|
SU1314110A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Механизированная крепь | 1985 |
|
SU1284013A1 |
| ОСНОВАНИЕ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1991 |
|
RU2010977C1 |
| Агрегат для выемки мощных угольных пластов | 1985 |
|
SU1273591A1 |
| Механизированная крепь | 1982 |
|
SU1062398A1 |
устройства ДЛЯ ПЕРЕДВИЖЕНИЯ СЕКЦИЙ МЕХАНИЗИРОВАННОЙ КРЕПИ, включаквдее гидродомкрат, размещенный на основании крепи и шарнирно связанный штоком с опорным кронштейном, на котором ..установлен ролик, а цилиндром с тягами, имеющими продольные пазы и закрепленными на секции конвейера, направляющие, установленные посредством оси и упоров на тягах, и пластины, закрепленные на оси и гидродомг крате, отличающееся тем, чтО| с целью повышения надежности работы устройства посредством обеспечения постоянной траектории движения основания, направляющие выполнены в виде поворотных в вертикальной плоскости рычагов, шарнирно соединен-Q ных между собой под углом, вершина 58 которого направлена в сторону ролика (Л да 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Попов В.Г | |||
| и др | |||
| Основные направления технического прогресса ча шахтах | |||
| М., Недра, 1970, ;;., 89-91 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для соединения механизированной крепи с конвейером | 1981 |
|
SU960445A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
