Изобретение OTEIOCHTCH к горно-добывающей промышленности, а именно к креплению очистных забоев механизированными крепями.
Целью, изобретения является повышение эффективности управления наклоном основания на слабой почве.
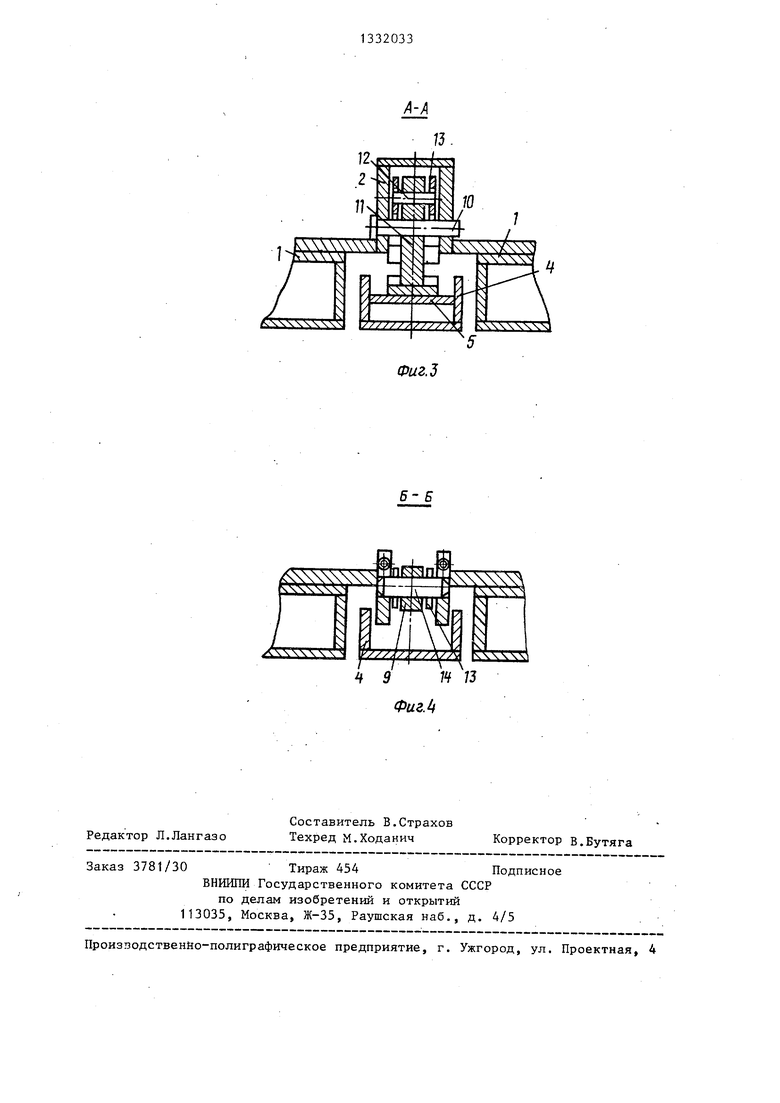
На фиг,1 показано устройство для передвижки основания при выдвинутой cBKutm крепи, вид сбоку,- на фиг. 2 - то же, при выдвинутом конвейере; на фиг,3 - разрез А-А на фиг,1; на фиг,4 - разрез Б-Б на фиг,2.
Устройство для передвижки основания секции механизгфованной крепи содержит продольные полозы 1, упор 2 с продольным пазом 3, направляющую балку 4, снабженную клиновой опорой 5 и соединенную шарниром 6 с конвейером 7, а цапфами 8 - с домкратом 9 передвижения, В поперечной траверсе на оси 10 установлен двуплечий рычаг 11, Один его конец осью 12 соединен с тягой 13, которая с помощью оси 14 установлена в продольном пазу 3 упора 2 и соединена с домкратом 9 передвижения, В упоре 2 выполнен выступ 15,
Устройство работает следующим образом.
Перед выдвижкой секции крепи жидкость подается в пординевую полость домкрата 9 передвижения. Домкрат раздвигается и ось 14 вместе с вторым концом тяги 13 перемещается в пазу 3 упора 2 к забою. При этом тяга 13 своим верхним концом поворачивает на оси 10 двуплечий рычаг до контакта с выступом 15,
10
15
вейера жидкость подается в штоковую полость домкрата 9 передвижения. Дом крат сокращается, и ось 14 вместе с вторым концом тяги 13 перемещается продольном пазу 3 к завалу. При это тяга 13 поворачивает двуплечий рыча 11, которьй выходит из контакта с клиновой опорой 5 направляющей балки 4, За счет этого обеспечивается свободная выдвижка конвейера 7 (фиг,2),
В дальнейшем цикл работы повторяется.
Формула изобретени
20
Устройство для передвижки основа ния секции механизированной крепи, включающее двуплечий рычаг, шарнирн установленньй на основании с возмож ностью контакта с направляющей балкой, закрепленной шарнирно на забой 25 ном конвейере, гидродомкрат передви жения, штоком соединенный с одним концом двуплечего рычага, а цилиндром - с направляющей балкой, упор, жестко закрепленный на основании пе зо ред штоком передвижения с возможностью взаимодействия с последним, отличающеес Я тем, что, целью повьшения эффективности управ ления наклоном основания на слабой почве, гидродомкрат передвижения св зан с двуплечим рычагом посредством тяги, первый конец которой шарнирно связан с одним концом двуплечего ры чага, а второй посредством оси - с
35
При движении основания к забою ры- о штоком гидродомкрата, при этом дну
чаг 11 контактирует с клиновой опорой 5 направляющей балки 4, за счет чего забойный носок основания приподнимается, и оно выезжает на более прочную почву (фиг,1). Перед выдвижкой конплечий рычаг расположен впереди уп ра, а упор выполнен с продольным п зом, в котором установлена с возмо ностью возвратно-поступательного п ремещения ось.
033
10
15
вейера жидкость подается в штоковую полость домкрата 9 передвижения. Домкрат сокращается, и ось 14 вместе с вторым концом тяги 13 перемещается в продольном пазу 3 к завалу. При этом тяга 13 поворачивает двуплечий рычаг 11, которьй выходит из контакта с клиновой опорой 5 направляющей балки 4, За счет этого обеспечивается свободная выдвижка конвейера 7 (фиг,2),
В дальнейшем цикл работы повторяется.
Формула изобретения
Устройство для передвижки основания секции механизированной крепи, включающее двуплечий рычаг, шарнирно установленньй на основании с возможностью контакта с направляющей балкой, закрепленной шарнирно на забой- ном конвейере, гидродомкрат передвижения, штоком соединенный с одним концом двуплечего рычага, а цилиндром - с направляющей балкой, упор, жестко закрепленный на основании перед штоком передвижения с возможностью взаимодействия с последним, отличающеес Я тем, что, с целью повьшения эффективности управления наклоном основания на слабой почве, гидродомкрат передвижения связан с двуплечим рычагом посредством тяги, первый конец которой шарнирно связан с одним концом двуплечего рычага, а второй посредством оси - со ,
штоком гидродомкрата, при этом дну
плечий рычаг расположен впереди упора, а упор выполнен с продольным пазом, в котором установлена с возможностью возвратно-поступательного перемещения ось.
Фиг.З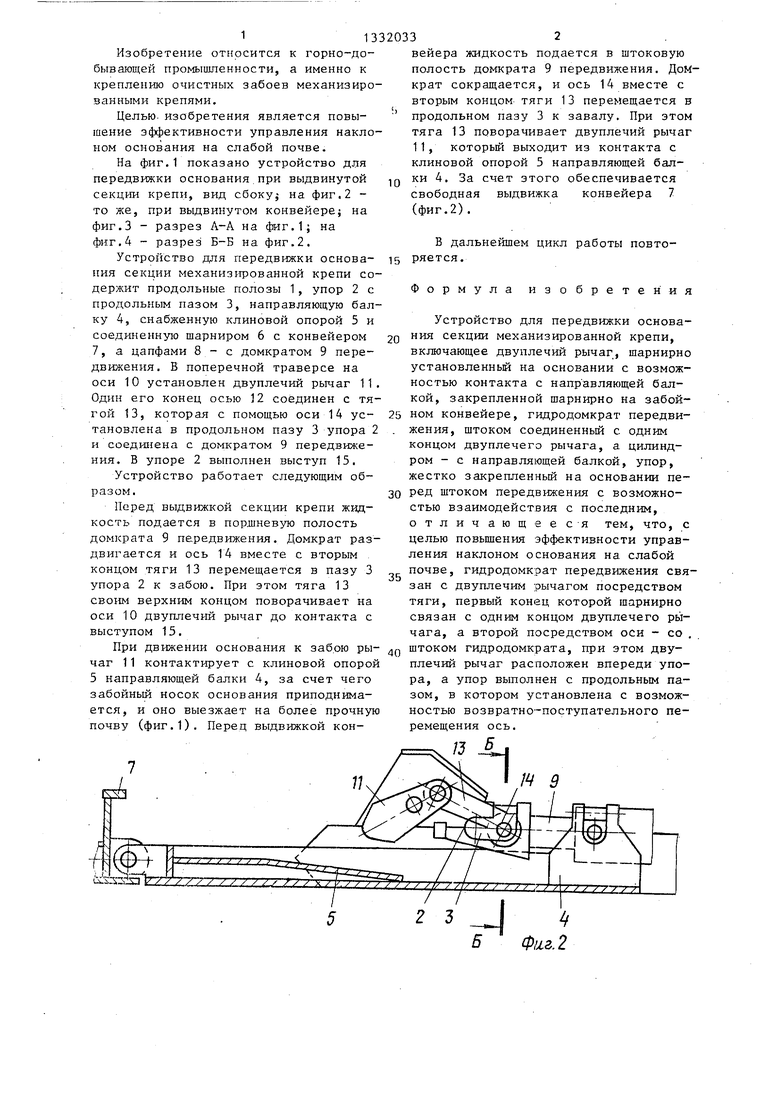
| название | год | авторы | номер документа |
|---|---|---|---|
| ОСНОВАНИЕ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1991 |
|
RU2010977C1 |
| Устройство для передвижения секции крепи | 1985 |
|
SU1314110A1 |
| Устройство для передвижения секций механизированной крепи | 1982 |
|
SU1064010A1 |
| Щитовая крепь | 1985 |
|
SU1335706A1 |
| Механизированная крепь | 1982 |
|
SU1062398A1 |
| Механизированная крепь сопряжения | 1988 |
|
SU1631184A1 |
| Механизированная крепь сопряжения | 1989 |
|
SU1717837A1 |
| СПОСОБ КРЕПЛЕНИЯ И УПРАВЛЕНИЯ КРОВЛЕЙ В ОЧИСТНОМ ЗАБОЕ, КРЕПЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА, МЕХАНИЗМ ТЕЛЕСКОПИЧЕСКОЙ ЗАТЯЖКИ ЗАЗОРОВ ПО КРОВЛЕ И ЗАВАЛУ, СОЕДИНЕНИЕ ОСНОВАНИЙ СЕКЦИЙ, НАПРАВЛЯЮЩАЯ БАЛКА КРЕПИ, МЕХАНИЗМ РАСПОРА СЕКЦИЙ КРЕПИ, МЕХАНИЗМ СКЛАДЫВАНИЯ КРЕПИ, КОЗЫРЕК ПЕРЕКРЫТИЯ КРЕПИ | 2001 |
|
RU2200843C2 |
| Основание секции механизированной крепи | 1978 |
|
SU717366A1 |
| Крепь монтажного слоя | 1980 |
|
SU935627A1 |
Изобретение относится к горнодобывающей промышленности, а именно к креплению очистных забоев механизи рованными крепями. Цель изобретения - повышение эффективности управления наклоном основания на слабой почве. Устройство включает шарнирно установ- ленньш на основании двуплечий рычаг (ДР) 11, направляющую мбалку 4, гвд- родомкрат (ГД) 9, связанный с ДР 11 тягой (т) 13. Первый конец Т 13 осью 12 связан с концом ДР 11, второй осью 14 - со штоком ГД 9. Установленный позади ДР 11 упор жестко закреплен на основании и выполнен с продольным пазом 3. В последнем с возможностью возвратно-поступательного перемещения установлена ось 14. Направляющая балка 4 выполнена с клиновой опорой 5 и шарниром 6 соединена с конвейером 7. Перед выдвижкой секции крепи ГД 9 раздвигается, ось 14 с вторым концом Т 13 перемещается в пазу 3 упора к забою. При этом первым концом Т 13 поворачивает на оси 10 ДР 11 до контакта с выступом 15. При движении основания к забою ДР 11 контактирует с опорой 5, приподнимая носок основания, которое выезжает на более прочную почву. 4 ил. 8 (Л со со IsD О СО со Фиг.1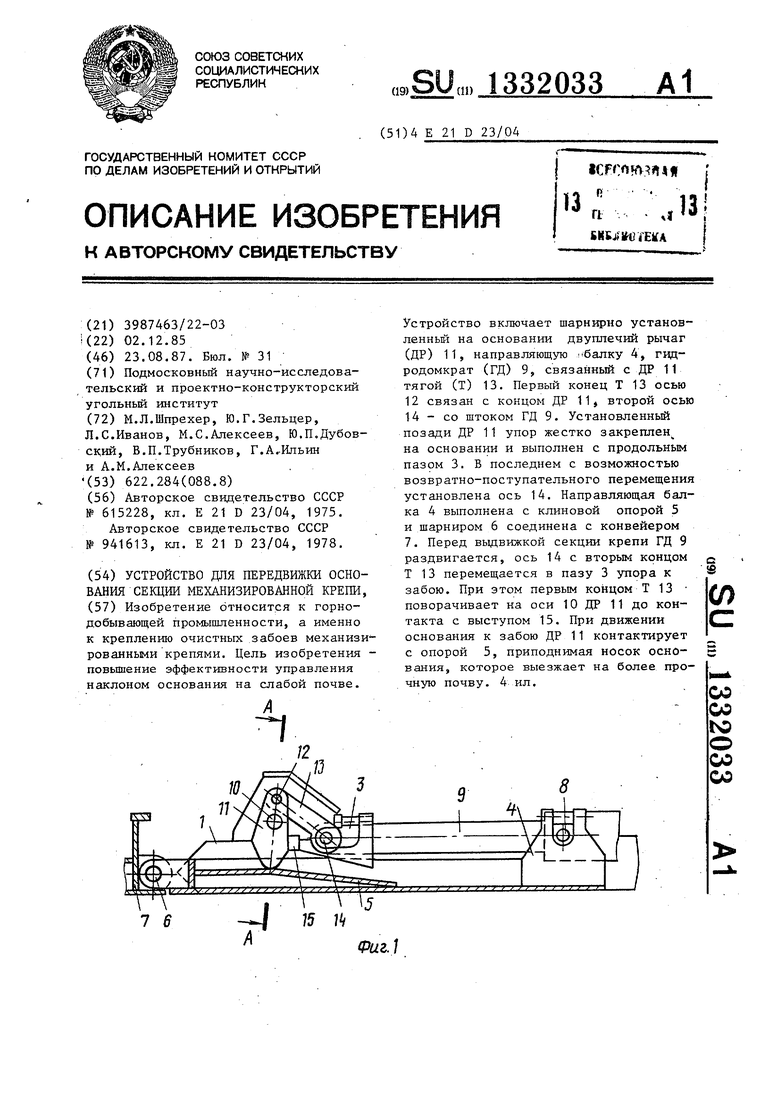
ч 9
Щ 13
Редактор Л.Лангазо
Составитель В.Страхов Техред М.Ходанич
Заказ 3781/30 Тираж 454Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Произподственйо-полиграфическое предприятие, г. Ужгород, ул. Проектная, А
Фиг. ft
Корректор в.Бутяга
| Секция механизированной крепи | 1975 |
|
SU615228A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Секция механизированной крепи | 1978 |
|
SU941613A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
