Предлагаемый способ трехсистемлого пязания чулок посредством чередующихся игл с длинными и короткими хвостами позволяет вывязыпать чулки с малораспускающимся переплетением, что достигается вязанием чулок в первой системе иглами с длинными хвостами, во BTopoii системе-иглами с короткими хвостами и в третьей системе- иглами с длинными и короткилси хвостами.
Вязание чулок осуществляют на трехсистемном круглочулочном автомате, снабженном чередующимися иглами с длинными и короткими хвостами, клином перед Первой системой для направления в. ее рабочий канал игл с длинными хвостами и разделяющими системы поворотными клиньями.
Предлагаемый трехсистемный круглочулочный автомат в отличие «т известных аналогичных автоматов имеет выдвижной клин, установленный в разделяющем клине перед второй системой, что обеспечивает направление в рабочий канал второй системы игл с короткими хвостами.
Для направления игл с длинными хвостами в нерабочий канал второй системы длинный хвост иг.п снабжен вырезом, предназначенным для свободного прохода мим выдвижного клина.
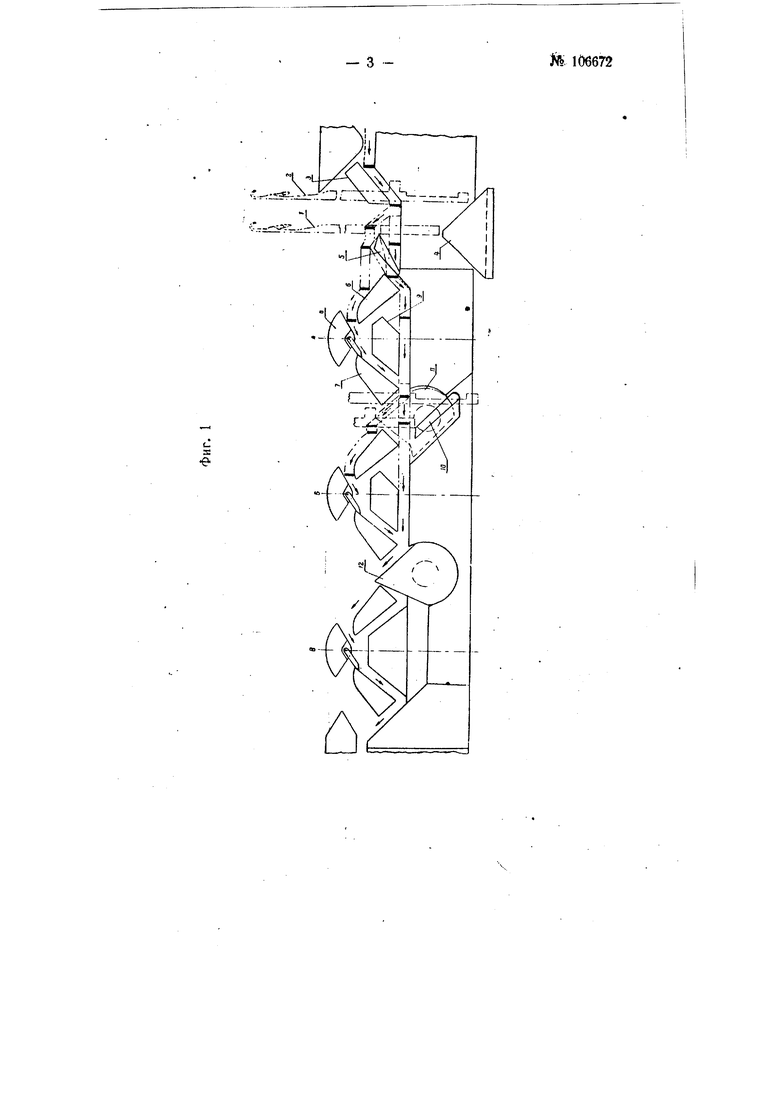
На фиг. 1 изображена схема замков трехсистемного кругломулочного автомата; на фиг. 2-схема малораспускающегося переплетения при вязании чулок на автомате.
Иглы / с короткими хвостами чередуются с иглами 2 с длинными хвостами. Клин 3 направляет все иглы в нерабочий канал первой системы А. Клин 4 направляет иглы: с длинными хвостами в рабочий канал первой системы А. Клин 5 выводит иглы в нормальное положение при вязании пятки.
Клинья 6 и 7 являются подъемнопровязывающими, клин -верхним средним замком, а клин 9-нижним средним замком.
Выдвижной клин 10 при отодвинутом от иголыгого цилиндра клине
1} напраапяп пглы с короткими хвостами и рабочий канал второй снстем1 1 6, а иглы с длинными хйоI/raMM - в иерлбочнй канал, что Лостиглстся :ь1 счет того, что иглы с короткими мюстами вступают во :),1имЪ|,ейст1)ис с. иыдвижным клиним }f мижпмм концом хвоста, а нгл1)1 с длинными хвостами благодаря выречу в хвосте свободно проходят мимо K,iH}ia 10 в нижний не.раб)чи1г канал системы.
Клип // пыполнсн поворотным и выдвижным от цилиндра автоматй и для направления игл в соспдниг 1-мстгмы при вязании пятки.
К.чнп /2 тожо выполнен новороттным и ).чняет эту роль при 6язаиии ПЯ1-К11 и при круговом врапкчпи ци.мипдра автомата.
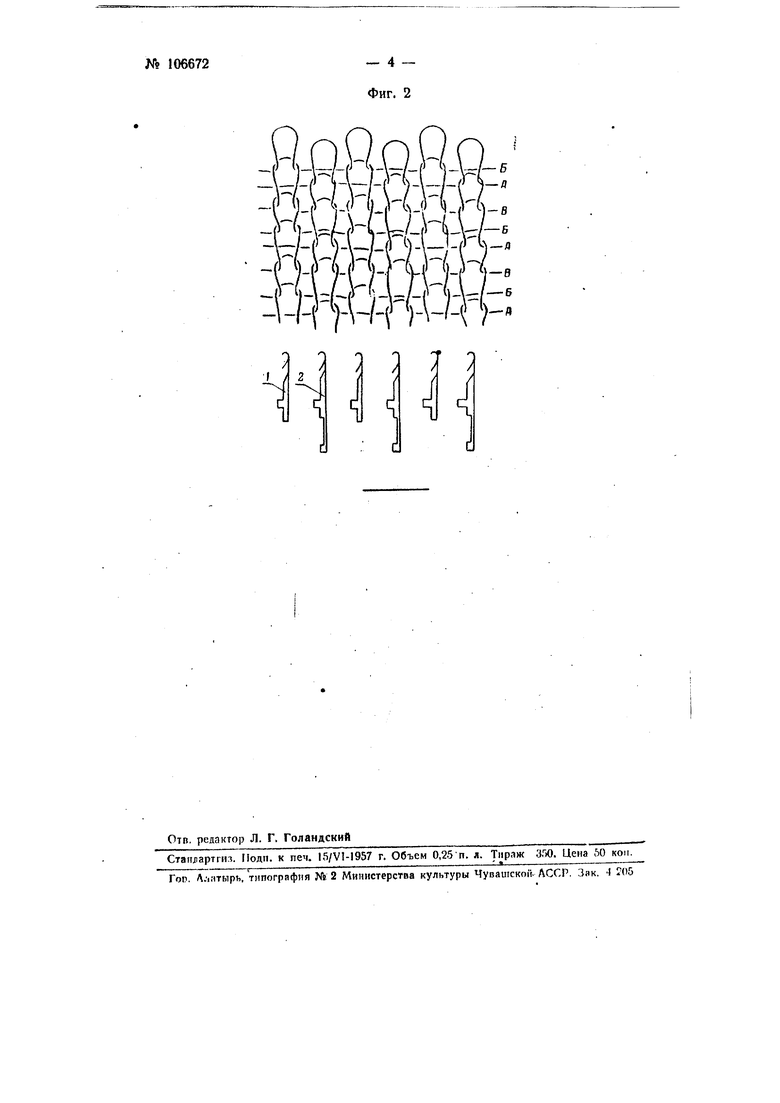
Малораспускаюпиччя переплетение, схема которого изображена на фиг. 2, получается при условии, что в первой нет.пеобразующей системе Л работают только йтлы 2 с длинными хвостами, по второй петлеобразующей системе Б-только иглы / с короткими хвостами, а в третьей пет.а(ч)бразук)щей системе .В работают все иглы.
Буквы /1, Б и В, поставленные Против каждого нетельного ряда, обочпачают помора петлеобразуЮ1ЦИХ систем, в которых образованы эти ряды.
.Иглы с короткими хвостами ничем не отличаются от обычных игл и направляются is рабочий или нерабочий канал системы в зависимости от того, высокий клин 10 или низкий клин 4 они встречают на пути своего движения, причем высокий клин, действуя на нижнюю грань хвоста иглы, направляет ее в ра(5очий канал второй системы Б, а
низкий клин--в нерабочий канал первой системы А.
Получаемое переплетение в сравнении с известными видами малораспускаюш,ихся переплетений, например, применяемых для чулочных изделий, мало отличается от обычной кулирной глади.
Предмет изобретения
1.Способ трехсистемного вязания чулок посредством чередующихся игл с длинными и короткими хвостами, отличающийся тем, что, с целью вывязывания малораспускающегося переплетения, в nepBoti системе вяжут иглами с длинными хвостами, во второй-иглами с короткими хвостами и в третьей-иглами с длинными и короткими хвостами.
2.Трехсистемпый круглочулочный автомат для осуществления способа по п. 1, снабжен1П)П1 чередующимися иглами с длинными и короткими хвостами, клином перед первой системой для направления в ее рабочий канал игл с длинными хвостами и разделяющими системы поворотными к.пиньями, от.пичающийся тем, что, с целью направления в рабочий канал второй системы игл с короткими хвостами, в разделяющем клине перед второй системой установлен выдвижной клин.
3.Форма выполнения автомата по п. 2, о т л и ч а ю щ а я с я тем, что, с целью направления игл с длинными хвостами в нерабочий канал второй cMcteMbi, длинный kBocT игл снабжен йырезом дли свободного йроХода Йймо выдвижного клина.
tе
Kt 106672
4
Фиг. 2
2{J:tHi }:Hd±H-l
-f-H-iSI-i
МШ1
rfr
liil{
/ /
