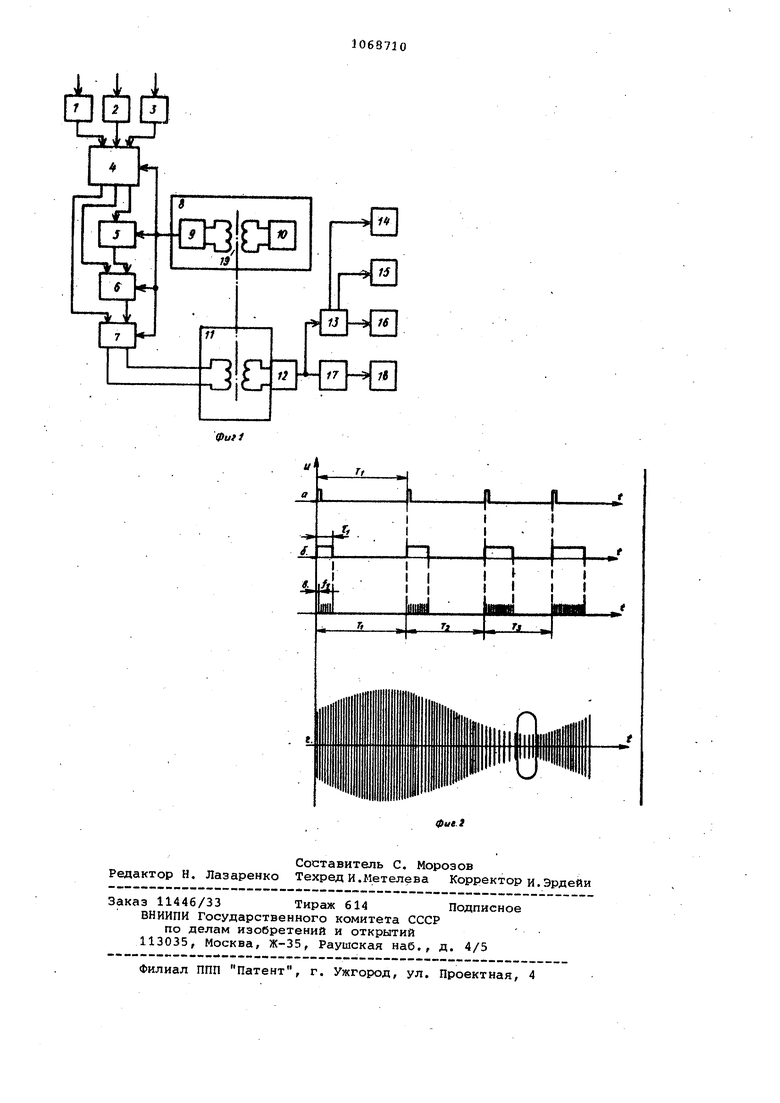
Изобретение относится к измерительной технике и может бить исполь зовано для одновременного контроля различных параметров вращающегося объекта с привязкой измерительной и формации к его углу поворота. Известно устройство для бесконтактного контроля вращающихся объек тов , содержащее подвижную передакхцу к неподвижную приемную обмотки, посредством которых осуществляется передача измерительной информации с объекта Г 13.. Недостатком устройства является низкая точность передачи измеритель ной информации в низкочастотном диа пазоне из-за неравномерности с1мплитудно-частотной характеристики инду тивно связанных обмоток.-- Наиболее близким к предлагаемому по технической сущности является устройство содержащее датчики,непод вижную и подвижную части, включающие в себя измеритель физического параметра, источник питания, вращаю щийся трансформатор, ротор которого соединен с выходом частотно-импульс ноге модулятора 2. Недостатками устройства являются невозможность съема и передачи информации от нескольких измерителей различных физических параметров через одну обмотку вращакяиегося транс форматора и отсутствие привязки получаемой информации к положению контролируемого объекта.. Целью изобретения является расширение функциональных возможностей устройства. Цель Достигается тем, что в устройство для бесконтактного контроля физических параметров вращающихся .объектов, содержащее датчики, источник питания, вращающийся трансформатор, ротор которого соединен с выходом частотно-импульсного модулятора, введены соединенные после довательно блок связи-, амплитудный .детектор и фазовый дискриминатор, анализатор длительности, вход-которого соединен с выходом блока связи первый, второй и третий демодулятор входы которых соединены с соответст вующими выходами анализатора длител ности, соединенные последовательно .согласующий блок, преобразователь напряжение-частота и широтно-импуль ный модулятор, выход которого соеди нен с входом частотно-импульсного модулятора, другие входы частотноимпульсного модулятора и широтноймпульсного модулятора соединены .с выходами согласующего блока, вход которого соединены с выходами.датчи ков, при этом выход источника питания соединен с соответствующими входами согласующего блока, преобра зователя напряжение-частота, широтно-импульсного и частотно-иг-тульсного модуляторов, а обмотки ротора вращающегося трансформатора расположены с эксцентриситетом. Такое построение устройства позволяет одновременно получать с объекта три вида информации, например, о виброакустических процессах, температурах, давлениях и т.д., с одновременной привязкой получаемой информации к положению контролируемого объекта. На Фиг.1 представлена упрощенная структурная схема устройства; на фиг.2 - условные графики напряжений на выходе его ос( узлов. Устройство содержит датчики 1-3 ( измерители физических параметров /, расположенные в соответствующих местах контролируемого объекта, согласующий блок 4, преобразователь 5 напряжение-частота, широтно-импульсный модулятор б частотно-импульсный модулятор 7 источник 8 питания, состоящий из выпрямительного блока 9 и источника переменного, тока, врацающийся трансформатор 11, блок 12 связи, анализатор 13 длительности, первый, второй и третий демодуляторы 14-16, амплитудный детектор 17, фазовый дискриминатор 18 и трансформатор 19 питания. Особ.енность конструкции вращающегося трансформатора 11заключается в эксцентричном расположении обмоток ротора относительно оси бращения. При этом выходы датчиков 1-3 через согласующий блок 4 подключены к соответствующим входам последовательно соединенных преобразователя 5 напряжение-частота, щиротно-импульсного модулятора 6 и частотно-импульсного модулятора 7, выход которого через последовательно соединенные вращающийся трансформатор 11, блок 12 связи, амплитудный детектор 17 подключен к фазовому дискриминатору 18, а выход блока 12связан через анализатор 13 длительности соответственно с первым, вторым и третьим демодуляторами 1416.Источник 10 переменного тока через трансформатор 19 питания и выпрямительный блок 9 соединен с согласующим -блоком 4, преобразователем 5 напряжение-частота, широтно-импульсным модулятором 6 и частотноимпульсным модулятором 7. Устройство работает следующим образом. Параметры контролируемого объекта, например величины вибраций, давлений и температуры преобразуются соответственно Датчиком 1 вибраций, датчиком 2 давления .и датчиком 3 температуры в электрические сигналы, которые поступают на трехканальный согласующий блок 4, содержащий
три угилитоля. Согласующий блок 4 необходим для усиления и: мерительных сигналов и согласования выходного сопротивления датчиков 1-3 с после-., дующим трактом. В общем случае контролируемые физические параметры могут быть отличныг1и от указанных в зависимости от установленных датчиков. Затем с выходов согласующего блока 4 сигналы с датчиков 1-3 поступают соответственно на преобразователь 5 напряжение-частота, широтно-.импульсный модулятор 6 .и частотно-импульсный модулятор 7, Последовательность формирования рабочего сигнала в преобразователе 5 напряжение-частота , ыиротно.-импульсном модуляторе 6 и частотно- импульсном модуляторе 7 поясняется с помощью графиков на фиг. 2. Напряжение с датчика 1 через согласуюишй блок 4 поступает на.преобразователь 5 напряжение-частота, где оно преобразуется в последовательность импульсов с временными интервалами (фиг. 2, а ,длительность которых. Т пропорциональна напряжению датчика 1, т.е. Т, f (Ц) . Эта последователь.ность используется для синхронизации работы широтно-импульсного модулятора б, который преобразует напряжение датчика 2 в импульсы с периодом Т и длительностьюJ f(U2/ (фиг.2,б).
В свою очередь выходные импульсы широтно-импульсного модулятора б используются для синхронизации работы частотно-импульсного модулятора 7, который преобразует напряжение Oj датчика 3 в пачки импульсов с частотой заполнения, равной f (Uj), периодом повторения 1; и длительностью Т (фиг.2 п ). Сформированный сигнал с выхода частотно-импульсного . модулятора 7 при прохождении через вращающийся трансформатор 11, у которого обмотки расположены эксцентрично относительно оси вращения, модулируется по амплитуде из-за периодического изменения индуктивной связи при вращении обмотки (фиг,2,г) Со вторичной обмотки вращающегося
трансформатора 11.сигнал через блок 12 связи поступает одновременно на вход аг1плитудного детектора 17, где производится выделение его огибающей, форма напряжения котор.ой близка к синусоидальной, и на вход анализатора 13 длительности, который осуществляет вьаделение временных интервалов последовательностей импульсов V,, Т. и -, и их распределение
на .первый, второй, третий демодуляторы 14,15, и 16. Получаемые одновременно на выходах преобразователей 14,15 и.16 напряжения соответствуют напряжениям датчиков 1,2 и 3 соответственно.
Выцеленное амплитудным детектором 17 напряжение огибающей преобразуется фазовым дискриминатором 18 в угол поворота подвижной части устройства, а поскольку последняя жестко скреплена с объектом контроля, то фиксируемые значения .напряжений с выходов преобразователей также будут жестко привязаны к углу поворота
объекта.
Питание всех узлов, расположенных в подвижной части устройства, осуществляется от источника 8 питания.
Устройство обеспечивает более широкие функциональные возможности так как передает информацию от генераторных первичных преобразователей, выходным сигналом которых является постоянное или медленно меняющееся напряжение (например,
термопреобразователиj и от параметрических первичных преобразователей ( например, резистивные, индуктивные и т.д./, а также позволяет производить дистанционные измерения без дополнительной потери точности в линии
связи. Устройство просто в изготовлении при массовом производстве, из-за невысоких требований к точности изготовления отдельных деталей, так как паразитная амплитудная модуляция Передаваемого сигнала из-за биений вращающихся деталей не оказывает влияния на точность передачи частотно-преобразованного
сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь аналоговых сигналов с гальваническим разделением цепей | 1984 |
|
SU1274140A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 1991 |
|
RU2020707C1 |
| МОНИТОРНАЯ СИСТЕМА ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 1993 |
|
RU2089094C1 |
| ИСТОЧНИК ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ | 1995 |
|
RU2074492C1 |
| Гидрофизический зонд | 1988 |
|
SU1536333A1 |
| СИСТЕМА СБОРА И ПЕРЕДАЧИ ИНФОРМАЦИИ С ВРАЩАЮЩЕГОСЯ ОБЪЕКТА | 2009 |
|
RU2416161C2 |
| Устройство для намотки нити | 1978 |
|
SU745840A1 |
| Устройство для передачи и приема сигналов | 1980 |
|
SU873261A1 |
| Преобразователь напряжения | 1990 |
|
SU1814177A1 |
| Преобразователь постоянного напряжения в квазисинусоидальное переменное | 1977 |
|
SU736303A1 |
УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ, содержащее датчики, источник питания, вращающийся Трансформатор, ротор которого соединен с выходом частотно-импульсного модулятора, отличающееся тем, что, с целью расширения функциональных воэмозхностей, в него введены соединенные последовательно блок связи, амплитудный детектор (. . ( -j; .-. П. ---;-- 7i-V-;......У а - . (;.,:-Т ifOTe,.. и фазовый дискриминатор, анализатор длительности, вход которого соединен с выходом блока связи, первый, второй и третий демодуляторы, входы которых соединены с соответствующикш выходами анализатора длительности, соединенные последовательно согласующий блок, преобразователь напряжение- частота и широтно-импульсный модулятор, выход которого соединен с входом частотно-импульсного модулятора, другие входы частотноимпульсного мсщулятора и широтноимпульсного модулятора соединены с выходами согласующего блока, входы которого соединены с выходами датчиков, при выход источника питания соединен с соответствующими КЛ входами согласующего блока, преобразователя напряжение-частота, широтно-импульсного и частотно-импульс ного модуляторов, а обмотки ротора вращающегося трансформатора расположены с эксцентриситетом. О5 00 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
