(54) УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1979 |
|
SU817896A1 |
| "Устройство для намотки нити на бобину | 1977 |
|
SU704877A1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| ДИЗЕЛЬ-ЭЛЕКТРИЧЕСКАЯ ПРИВОДНАЯ СИСТЕМА | 2007 |
|
RU2427482C2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Электропривод | 1979 |
|
SU864476A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1986 |
|
SU1372582A1 |
| СПОСОБ МОНИТОРИНГА КОНТРОЛЛЕРА ТРЕХФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2520162C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1967 |
|
SU216836A2 |
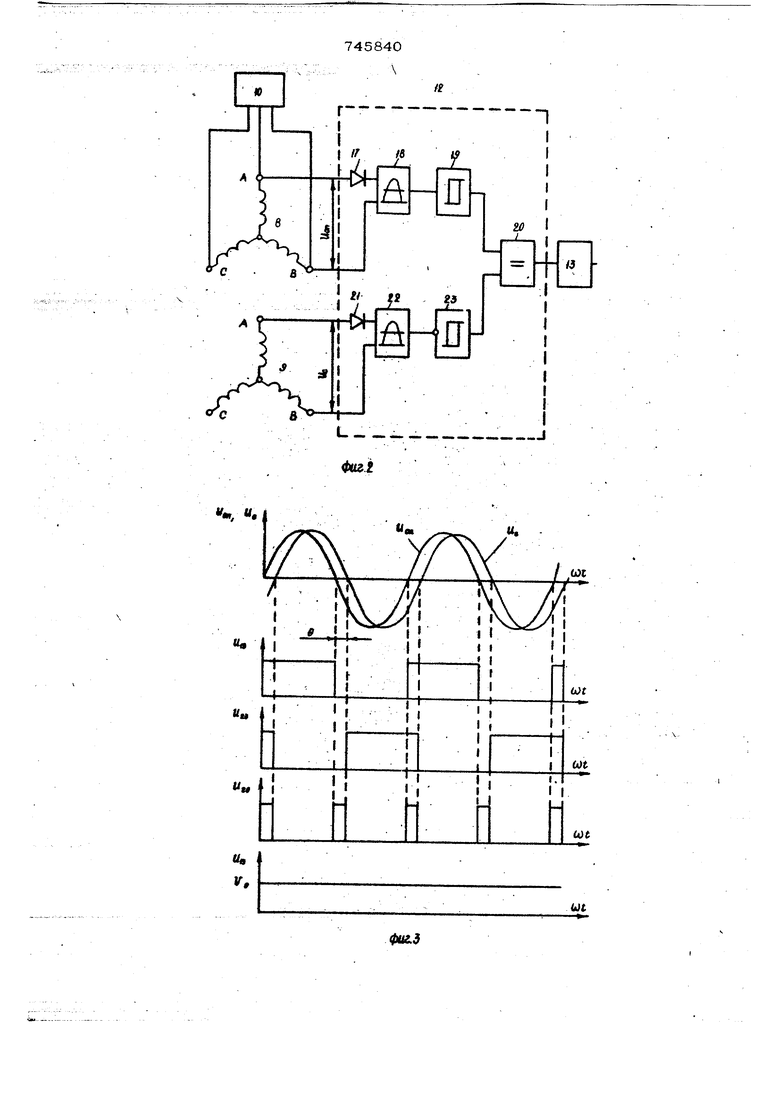
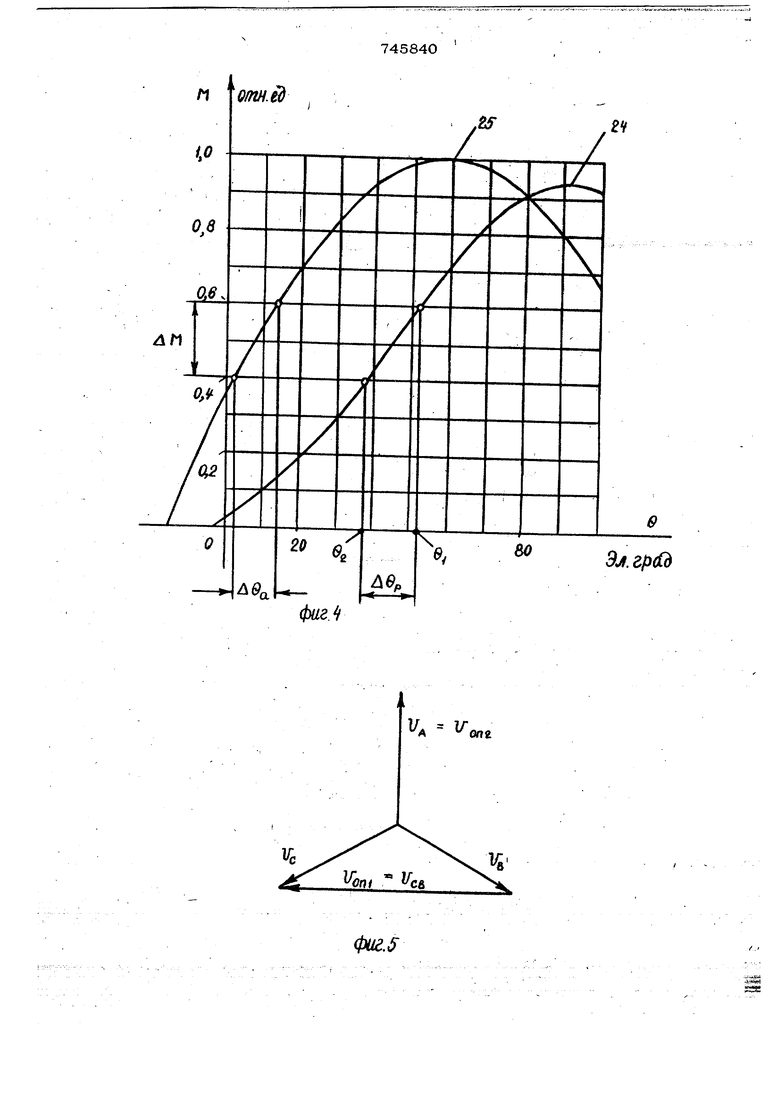
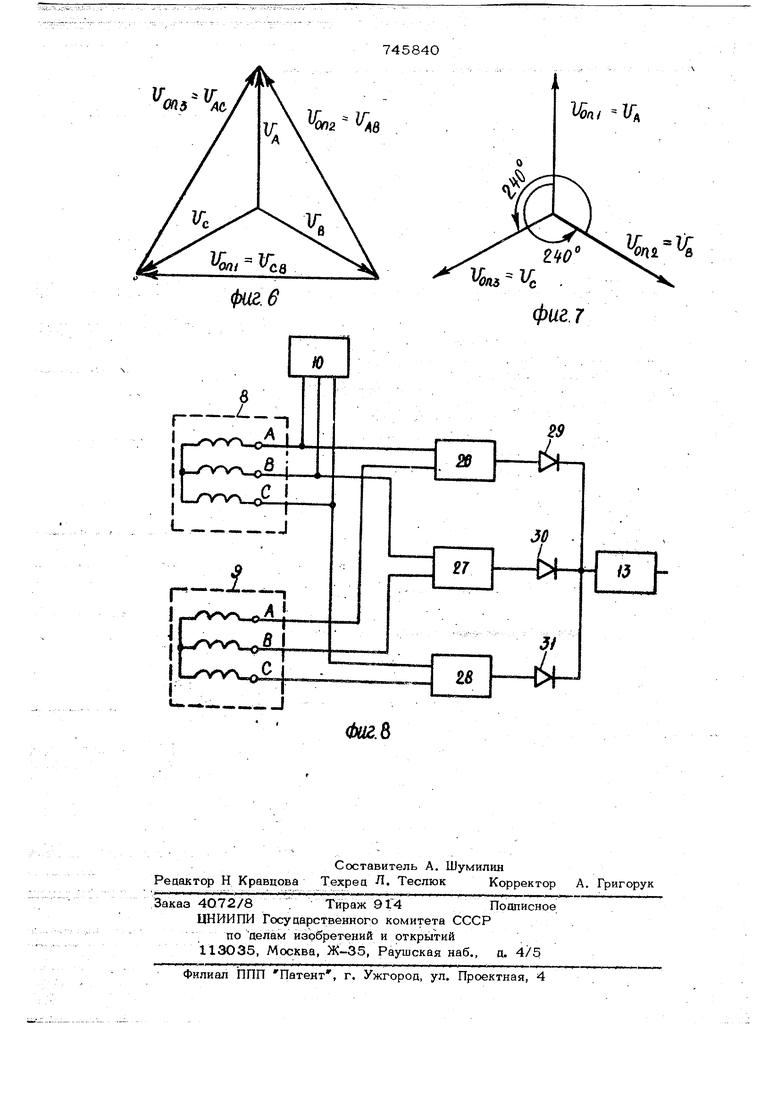
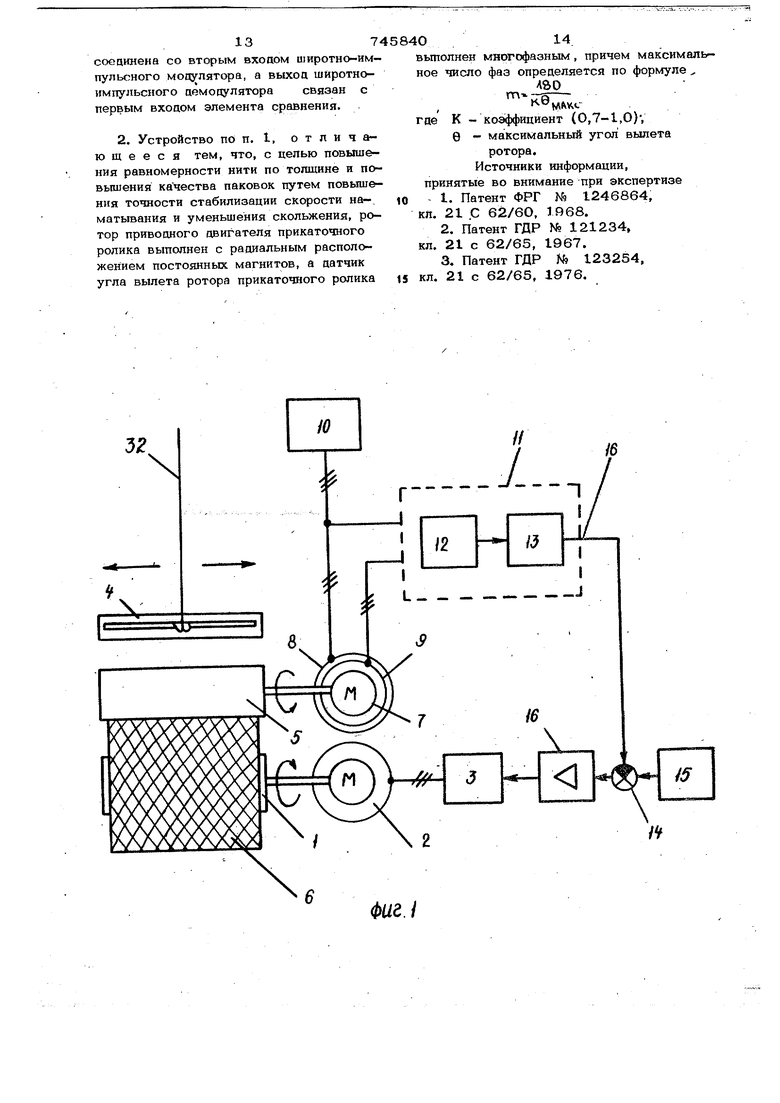
: 1 . . Изобретение относится к намоточным устройствам и может быть использовано в приемно- намоточных механизмах машин для производства химических волокон с высокой и постоянной скоростью приема нити на вращающукюя бобину. Известно устройство для намотки нити содержащее бобинодержатель, обязанный с приводным электродвигателем, поДклк ченным к регулируемому преобразоваТе лю частоты, нитераскладчик, прикаточный ролик, фрикционно связанный с -наматываемой паковкой и соединенный с привЬ{щь1м синхронным двигателем, подключенным к регулируемому источнику переменного напряжения, зацатчик момента нагрузки на оси прикаточного ролика, элемент сра&нения действительного и заданного моментов нагрузки прикаточного ролика, подклк ченный ко входу регулируемого преобразователя l1 и 2 , Недостатком этих устройств является сложность их конструкции и недостаточная надежность. Наиболее близким техническим решением является устройство для намотки нптк, : содержащее бобинодержатель, связанный с электродвигателем, подключенным к регулируемому преобразователю частоты, нитераскладчик, прикаточный ролик, установленный с Еозможностью взаимодействия по образующей с паковкой и соединённый с приводным двигателем, связанным с регулируемым Источником переменного напряжения, за датчик опорного напряжения, датчик частоты вращения прикаточного ролика, датчик угла вылета прикаточного ролика, соединенный с первым .входом элемента сравнения, за датчик уг-; ла вылета прикаточного ролика, соединенный со вторым входом элемента сравнения, выход которого через усилитель соединен со входом регулируемого преобразователя частоты. В указанном устройстве в качестве информационного параметра для контроля .вращающего момента на валу прикаточного ролика используется геометрический угол ck фазового сдвига межпу угловым полож нием прикаточного ролика и угловым положением ротора специально введенного базового двигателя, запитанного вместе с двигателем прикаточного ролика от общего для всех рабочих мест регулируемого преобразователя частоты. Наличие указанног угла фазового сдвига, называемого углом вылета ротора, обусловлено тем, что базовый двигатель вращается вхолостую, а приводной двигатель прикаточного ролика покрывает механические и аэродинамические потери прижатого к паковке прикаточного ролика 3. Недостатки устройства заключаются в том, что наличие базового двигателя с датчиком .частоты вращения, а также датчика частоты вращения прикаточного роли ка, установленного в зоне обслуживания намоточного устройства, увеличивает nefiвоначальные капитальные затраты, а также габариты устройства для намотки, кро ме того, датчик частоты вращения прикаточного ролика нуждается в монтаже и индивидуальной настройке на рабочем мес те для того, чтобы его выходной сигнал на холостом ходу прикаточного ролика находился в противо(1)азе по .отношению к сигналу базового датчика, что усложняет монтаж и настройку намоточного устройства перед вводом ъ эксплуатацию. Целью изобретения является упрощение конструкции и повьпиение надежности устройства ОЛЯ намотки нити на бобину. Указанная цель достигается тем, что в известном устройстве приводной двигатель п{зикатьчного ролика выполнен в вице синхронного двигателя с постоянными 1йагай1ами, имеющего дополнительную i . генераторную обмотку, равномерно размещенную на статоре в пазах для рабочей .обмотки, а датчик угла вьтета прикато лого ролика состоитиз последовательно соединенньге между собой щиротно-импульо ных модулятора и демодулятора, при этом рабочая обмотка синхронного двигателя соединена с регулируемым источником переменного напр:яжения и с первым .входом широтно-импульсного модулятора, дополнительная генераторная обмотка синхронного двигателя соединена со вторым входом широтно-иМпульсного модулятора, а выход щиротно-иМпульсного демодулятора связан с первым входом элемента сравнения. КроШтЫЬ; с iientro повьпиения равномерности нити по толщине и повышения К1ачества паковок путем повышения то ности стабилизации скорости наматывания и уменьшения cкoль)keния, ротор приводного двигателя прикаточного ролика вьтолнен с радиальным расположением постоян- ных магнитов, а датчик угла вылета ротора вьтолнен многофазным, причем максимальное число фаз определяется по формулегде К- коэффициент (0,7-1,0), Э - максимальный угол вылета ротора, соответствующий максимальному электромагнитному моменту днигателя. ., Размещение сигнальной генераторной обмотки на статоре двигателя прикаточно- го ролика и использование ее в качестве считывающего элемента датчика частоты вращения, а также применение ротора с постоянными магнитами и использование его в качестве модулирующего элемента позволяет исключить необходимость специальной установки датчика частоты вращения прикаточного ролика, Использование же источника питания пвигателя прикаточного ролика в качестве задатчика переменного опорного напряжения позволяет исклк Чить из устройства базовый двигатель и связанный с ним базовый датчик частоты вращения. Вследствие того, что двигатель прикаточного ролика является первичным измерительным преобразователем в цепи преобразовйния момента на валу прикаточного ролика в потенциальный электрический сигнал, то увеличение коэффициента передачи двигателя dB/cJM существенно повьщзает точность стабилизации указанного момента, так как уменьшается значение приведенной к выходу датчика угла вылета погрешности первичного измерительного преобразо вателя. На фиг. 1 изображена функциональная схема устройства отя намотки нити,- на ф„ - функциональная схема однофазного датчика угла вылета ротора; на фиг.Звремённые диаграммы сигналов в характерных точках однофа;зного датчика угла йы„ета ротора на фиг. 4 - зависимости электромагнитного момента М в функции угла 9 вылета ротора для синхронных двигателей с постоянными магнитами, на ({иг. 5, 6 и 7 - векторные диаграммы, иллюстрирующие формирование соответственно двухфазной и трехфазной систем опорных напряжений многофазного датчика угла вылета ротора; на фиг. 8 - функциональная схема трехфазного шэтчика угла вылета ротора.
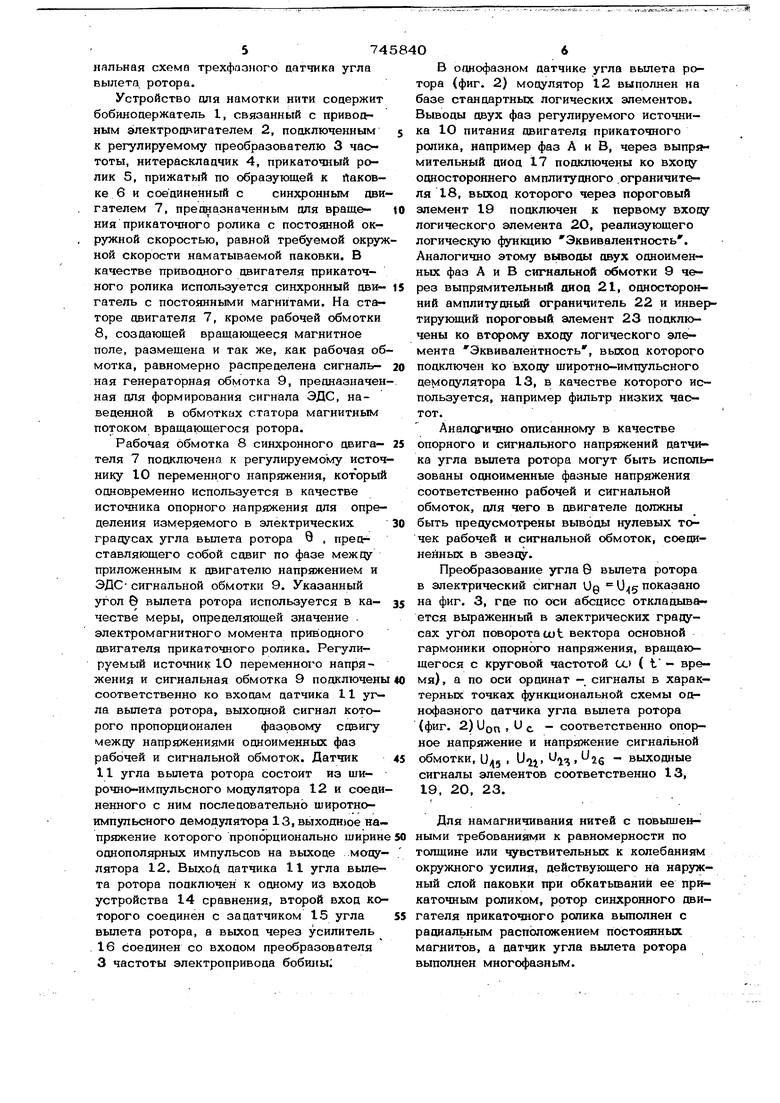
Устройство ОЛЯ намотки нити содержит бобиноцержатель I, связанный с приводным электродригателем 2, подключенным к регулируемому преобразователю 3 чаототы, нитераскладчик 4, прикаточный ролик 5, прижатый по образующей к Лаковке 6 и соединенный с синхронным двигателем 7, предназначенным для вращеНИН прикаточного ролика с постоянной окружной скоростью, равной требуемой окружной скорости наматываемой паковки. В качестве приводного двигателя прикаточного ролика используется синхронный двигатель с постоянными магнитами. На статоре двигателя 7, кроме рабочей обмотки 8, создающей вращающееся магнитное поле, размещена и так же, как рабочая обмотка, равномерно распределена сигнальная генераторная обмотка 9, предназначенная для формирования сигнала ЭДС, наведенной в обмотках статора магнитным потоком вращающегося ротора.
Рабочая обмотка 8 синхронного двига- теля 7 подключена к регулируемому источнику 10 переменного напряжения, котЪрый одновременно используется в качестве источника опорного напряжения для определения измеряемого в электрических градусах угла вылета ротора 9 , пред ставляющего собой сдвиг по фазе между приложенным к двигателю напряжением и ЭДС- сигнальной обмотки 9. Указанный угол в вылета ротора используется в качестве меры, определяющей значение . электромагнитного момента прив1одного двигателя прикаточного ролика. Регулируемый источник 1О переменного напряжения и сигнальная обмотка 9 подключены соответственно ко входам датчика 11 угла вылета ротора, выходной сигнал которого пропорционален фазовому сдвигу между напряжениями одноименных фаз рабочей и сигнальной обмоток. Датчик 11 угла вылета ротора состоит из широчно-импульсного модулятора 12 и соединенного с ним последовательно широтноимпупьсного демодулятора 13, выходное напряжение которого пропорционально ширин однополярных импульсов на выходе модулятора 12. Выхоа датчика 11 угла вылета ротора подключен к одному из входоЬ устройства 14 сравнения, второй вход которого соединен с за датчиком 15 угла вылета ротора, а выход через усилитель 16 соединен со входом преобразователя 3 частоты электропривода бобины
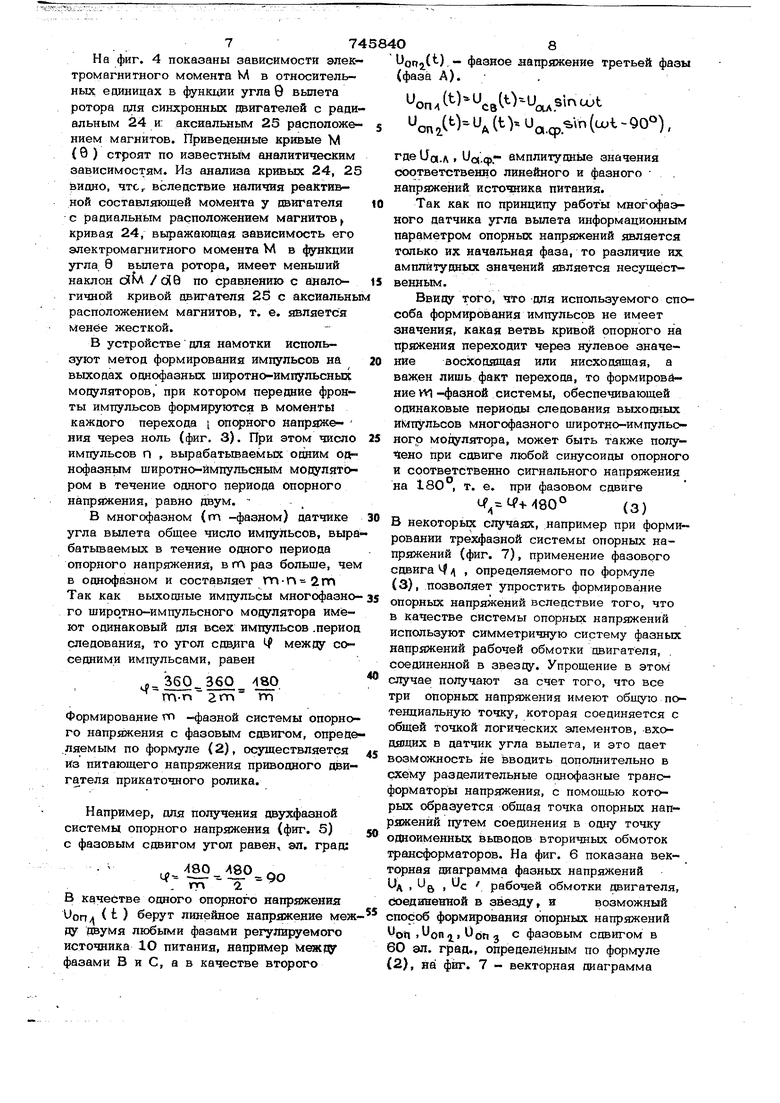
В однофазном датчике угла вылета ротора (фиг. 2) модулятор 12 выполнен на базе стандартных логических элементов. Выводы двух фаз регулируемого источника 10 питания двигателя прикаточного ролика, например фаз А и В, через выпpJ мительный диод 17 подключены ко вхоцу одностороннего амплитудного .ограничителя 18, выход которого через пороговый элемент 19 подключен к первому вхоцу логического элемента 2О, реализующего логическую функцию Эквивалентность. Аналогично этому вьюооы двух одноименных фаз А и В сигнальной обмотки 9 через выпрямительный оиоп 21, односторонний амплитудный ограничитель 22 и инвертирующий пороговый элемент 23 подключены ко втфому входу логического элемента Эквивалентность, выход которого подключен ко входу широтно-импульсного демодулятора 13, в качестве которого используется, например фильтр низких частот.
Аналогично описанному в качестве опорного и сигнального напряжений датчика угла вылета ротора могут быть Hcnont зованы одноименные фазные напряжения соответственно рабочей и сигнальной обмоток, для чего в двигателе должны быть предусмотрены выводы нулевых точек рабочей и сигнальной обмоток, соединенных в звезду.
Преобразование угла Э вылета ротора в электрический сигнал Ug 1)5 показано на фиг. 3, где по оси абсцисс откладывается выраженный в электрических градусах угол поворота cot вектора основной гармоники опорного напряжения, вращающегося с круговой частотой со ( f - время), а по оси ординат - сигналы в характерных точках функциональной схемы однофазного датчика угла вылета ротора (фиг. 2) УОП J с. - соответственно опорное напр5ркение и напряжение сигнальной обмотки, U;|g , Jii iG - выходные сигналы элементов соответственно 13, 19, 20, 23.
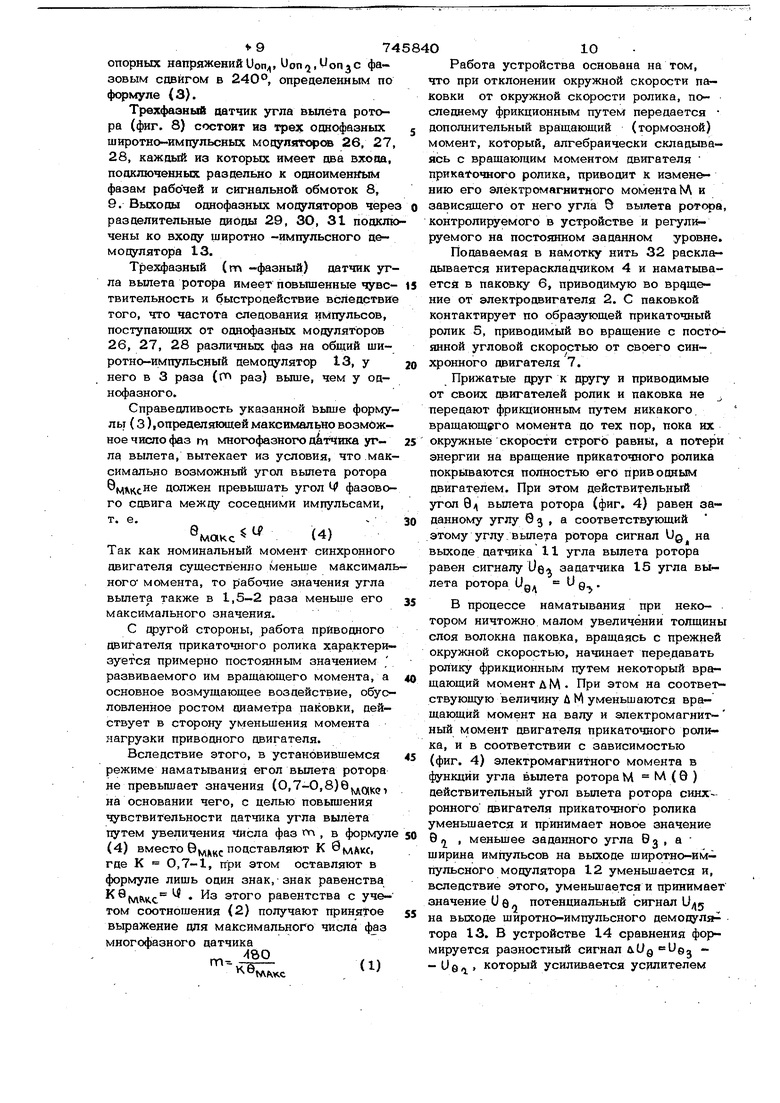
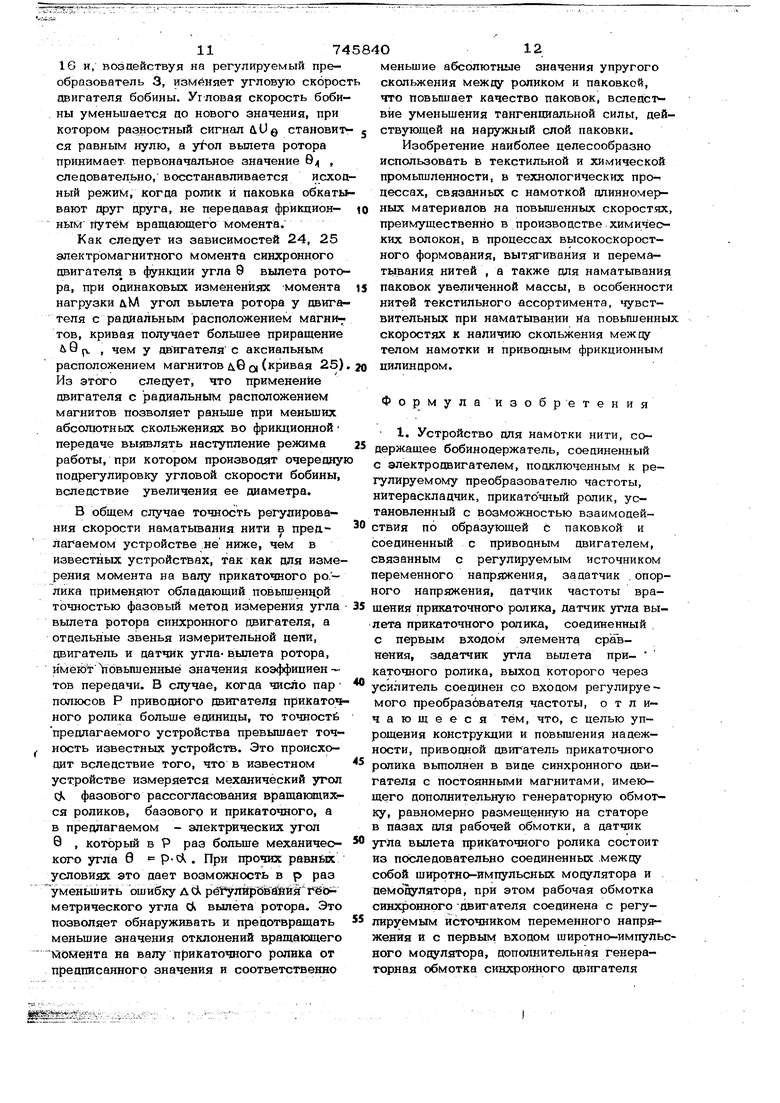
Для намагничивания нитей с повьпиен- ными требованиями к равномерности по толщине или чувствительных к колебаниям окружного усилия, действующего на наружный слой паковки при обкатьтаний ее прикаточным роликом, ротор синхронного двигателя прикаточного ролика вьшолнен с радиальным расположением постоянных магнитов, а датчик угла вылета ротора выполнен многофазным. На фиг. 4 показаны зависимости элек тромагнитного момента М в относительных единицах в функдии угла 9 вьтета ротора для синхронных двигателей с радиальным 24 и: аксиальным 25 расположением магнитов. Приведенные кривые М (9 ) строят по известным аналитическим зависимостям. Из анализа кривых 24, 25 видно, чтс, вследствие наличия реактивной составл5Яощей момента у двигателя с радиальным расположением магнитов кривая 24, выражающая зависимость его электромагнитного момента М в функции угла 9 вылета ротора, имеет меньший наклон сЛ /О18 по сравнению с аналогичной кривой двигателя 25 с аксиальны расположением магнитов, т. е. является менее жесткой. В устройстве для намотки используют метод формирования импульсов на выходах однофазных широтно-импульсных модуляторов, при котором передние фронты импульсов формируются в моменты каждого перехода i опорного напрджения через ноль (фиг. 3). При этом число импульсов п , вырабатываемых одним однофазным широтно-ймпульсным модулятором в течение одного периода опорного напряжения, равно двум. В многофазном (т -фазном) датчике угла вьтета общее число импульсов, выра батьтаемых в течение одного периода опорного напряжения, в m раз больше, чем в однофазном и составляет 1Па-г 2т Так как выходные импульсы многофазно го широ.тно-импульсного модулятора имеют одинаковый для всех импульсов .период следования, то угол сдвига между соседними импульсами, равен 360 ЗбО /180 m-n 2f Формирование го -фазной системы опорно го напряжения с фазовым сдвигом, опреде ляемым по формуле (2), осуществляется Из питающего напряжения приводного двига теля прика точного ролика. Например, для получения двухфазной системы опорного напряжения (фиг. 5) с фазовым сдвигом угол равен, эл. град: И90 80 В качестве одного опорного напряжения опл t ) берут линейное напряжение меж ду двумя любыми фазами регулируемого источника Ю питания, например меж фазами В и С, а в качестве второго 74 О ),- фазное аапряжение третьей фазы (фаза А). lJonA t)U(t)--U,sincut on С)- А (t) и. (t - 90°). где UCK.A , Uc«.q,- амплитудные значения соответственно линейного и фазного напряжейий истотаика питания. Так как по принципу работы многофазного датчика угла вылета информационным параметром опорных напряжений является только их начальная фаза, то различие их амплитудных значений является несущественным. Ввиду того, что для используемого способа формирования импульсов не имеет значения, какая ветвь кривой опорного на пряжения переходит через нулевое значение восходящая или нисходящая, а важен лишь факт перехода, то формирование VV1 -фазной системы, обеспечивающей одинаковые периоды следования выходных импульсов многофазного широтно-импульсногр модул5ггора, может быть также получено при сдвиге любой синусоиды опорного и соответственно сигнального напряжения на 180 , т. е. при фазовом сдвиге cf M-b/ISO (3) В некоторых случаях, например при форми ровании трехфазной системы опорных напряжений (фиг. 7), применение фазового сдвига / , определяемого по формуле (3), позволяет упростить формирование опорных напряжений вследствие того, что в качестве системы опорных напряжений используют симметричную систему фазных напряжений рабочей обмотки двигателя, соединенной в звезду. Упрощение в этом случае получают за счет того, что все три опорных напряжения имеют общую потенциальную точку, которая соединяется с общей точкой логических элементов, входя1дих в датчик угла вылета, и это дает возможность не вводить дополнительно в разделительные однофазные трансформаторы напряжения, с помощью которых образуется общая точка опорных напряжений путем соединения в одну точку одноименных вьюодов вторичных обмоток трансформаторов. На фиг. 6 показана векторная диаграмма фазных напряжений -в рабочей обмотки даигателя, соеданенной в звезду, ивозможный способ формирования опорных напряжений УОП . Ооп 3 с фазовым сдвигом в 60 эл. г|эад., определенным по формуле (2), на фиг. 7 - векторная диаграмма опорных напряженийUon, Uon/j. фазовым сдвигом в 240°, определенным по формуле (3). Трехфазный цатчик угла вьшёта ротора (фиг. 8) состоит иа трех оцнсфазных широтно-импульсных моаупят ч)ж 26. 27 28, кажпьй из которых имеет два входа, подключенных раздельно к одноименным фазам рабочей и сигнальной обмоток 8, 9. Выходы однофазных модуляторов чере разделительные диоды 29, 30, 31 подкяк чены ко входу щиротно -импульсного демопулятора 13. Трехфазный (т -фазный) датчик уг ла вылета ротора имеет повышенные чувствительность и быстродействие вследстви того, что частота следования импульсов, поступающих от однофазных модуляторов 26, 27, 28 различных фаз на общий широтно-импульсдый демодулятор 13, у него в 3 раза (f раз) выше, чем у однофазного. Справедливость указанной ьыше форму лы (3).определяющей максимально возможное число фаз m многофазного датчика угла вылета, вытекает из условия, что .мак симально возможньй угол вылета ротора МАксНе должен превьпиать угол 4 фазового сдвига межпу соседними импульсами, т. е.- . (4) Так как номинальный момент синхронного двигателя существенно меньше максимал ного момента, то рабочие значения угла вьшета также в 1,5-2 раза меньше его максимального значения. С другой стороны, работа приводного Двигателя прикаточного ролика характеризуется примерно постоянным значением развиваемого им вращающего момента, а основное возмущающее воздействие, обусловленное ростом диаметра паковки, действует в сторону уменьшения момента нагрузки приводного двигателя. Вследствие этого, в установившемся режиме наматывания егол вылета ротора не превышает значения (0,7-0,8)(,5,, на основании чего, с целью повьпиения чувствительности датчика угла вылета путем увеличения Числа фаз v , в формул (4) вместо 9щцс подставляют К б МАМ, где К 0,7-1, при этом оставляют в формуле лишь один знак, знак равенства («лис . Из этого равентства с учетом соотношения (2) получают принятое выражение для максимального числа фаз многофазного датчика Работа устройства основана на том, что при отклонении окружной скорости паковки от окружной скорости ролика, последнему фрикционным путем передается дополнительный вращающий (тормозной) момент, который, алгебраически складываясь с вращающим моментом двигателя прикаточного ролика, приводит к изменению его электромагнитного момента М и зависящего от него угла Q вылета ротора, контролируемого в устройстве и регулируемого на постоянном заданном уровне. Подаваемая в намотку нить 32 раскладывается нитераскладчиКом 4 и наматывается в паковку 6, приводимую во врдщение от электродвигателя 2. С паковкой контактирует по образующей прикаточный ролик 5, приводимый во вращение с посто$шной угловой скоростью от своего синхронного двигателя 7. Прижатые друг к другу и приводимые от своих даигателей ролик и паковка не передают фрикционным путем никакого вращающего момента до тех пор, пока их окружные скорости строго равны, а потери энергии на вращение прикаточного ролика покрываются полностью его приводным двигателем. При этом действительный угол 9/( вылета ротора (фиг. 4) равен заданному углу 03 , а соответствующий этому углу.вылета ротора сигнал UQ на выходе датчика 11 угла вылета ротора равен сигналу UQ за датчика 15 угла вылета ротора Ug. J 0 . В процессе наматывания при некотором ничтожно малом увеличении толщины слоя волокна паковка, вращаясь с прежней окружной скоростью, начинает передавать ролику фрикционным путем некоторый вращающий момент д М - При этом на соответствующую величину Л М уменьшаются вращающий момент на валу и электромагнит- ный момент двигателя прикаточного ролика, и в соответствии с зависимостью (фиг. 4) электромагнитного момента в функции угла вылета ротора М М (9 ) действительный угол вылета ротора синхронного двигателя прикаточного ролика уменьшается и принимает новое значение S 0 , меньшее заданного угла Вд , а ширина импульсов на выходе широтно-импульсного модулятора 12 уменьшается и, вследствие этого, уменьшается и принимает значение U Q потенциальный сигнал на выходе широтно-импульсного демоцул тора 13. В устройстве 14 сравнения формируется разностный сигнал - и е о который усиливается усютителем 11745 16 и, воздействуя на регулируемый преобразователь 3, изменяет угловую скорост двигателя бобины. Ут-ловая скорость бобины уменьшается до нового значения, при котором разностный сигнал ЛО становит ся равным нулю, а yfon вылета ротора принимает первоначальное значение 8 , следовательно, восстанавливается исходный режим, когда ролик и паковка обкат вают друг друга, не передавая фрикционным- путём вращающего момента. Как следует из зависимостей 24, 25 электромагнитного момента синхронного двигателя в функции угла 9 вьшета ротора, при одинаковых изменениях момента нагрузки йМ угол вылета ротора у двигателя с радиальным расположением магни тов, кривая получает большее приращение л9(х , чем у двигателяс аксиальным расположением магнитов ,8 QI (кривая 25). Из этого следует, что применение двигателя с радиальным расположением магнитов позволяет раньше при меньших абсолютных скольжениях во фрикционной передаче выявлять наступление режима работы, при котором производят очередную подрегулировку угловой скорости бобины, вследствие увеличения ее диаметра. В общем случае точность регулирования скорости наматьюания нити в пред лагаемом устройстве ,не ниже, чем в известных устройствах, так как для измеJ, рения момента на валу прикаточного ро,-переменного напряжения, за датчик . опорлика применяют обладающий повьш1енцрйного напряжения, датчик частоты враточностью фазовый метод измерения угла35 щения прикаточного ролика, датчик угла вывылета ротора синхронного двигателя, алета прикаточного ролика, соединенный отдельные звенья измерительной цеии,с первым входом элемента сравдвигатель и датчик угла- эылета ротора,нения, задатчик угла вылета приимеютПовышенные значения коэффициен-каточного ролика, выход которого через тов передачи. В случае, когда число пар усилитель соединен со входом регулируеполюсов Р приводного двигателя прикато - мого преобразователя частоты, о т л и- ного ролика больше единицы, то точностичающееся тем, что, с целью уппредлагаемого устройства превышает точ-рощения конструкции и повышения надежность известных устройств. Это происхо-ности, приводной двигатель прикаточного дит вследствие того, что в известном 5 ролика вьтолнен в виде синхронного двиустройстве измеряется механический уголгателя с постоянными магнитами, имеюС|ч фазового рассогласования вращающих-щего дополнительную генераторную обмотся роликов, базового и прикаточного, аку, равномерно размещенную на статоре в предлагаемом - электрических уголв пазах для рабочей обмотки, а датчик 9 , которьй в Р раз больше механичео- угла вылета прикгаточного ролика состоит кого угла б РСЛ . При прочих равн 1Хиз последовательно соединенных .между условиях это дает возможность в р разсобой ширртно-импульсных модулятора и уменьшить ошибку д Л рё1 уййрШа1нй1Гё1 демодулятора, при этом рабочая обмотка метрического угла d вылета ротора. Этосинхронного -двигателя соединена с регупозволяет обнаруживать и предотвращать55 лируемым источником переменного напряменьшие значения отклонений вращающегожения и с первым входом широтно-импульстйбиейта на валу прикаточного ролика отного модулятора, дополнительная генерапрецписанного значения и соответственноторная обмотка синхронного двигателя О12 меньшие абсолютные значения упругого скольжения между роликом и паковкой, что повышает качество паковок, вслеас вие уменьшения тангенциальной силы, действующей на наружный слой паковки. Изобретение наиболее целесообразно использовать в текстильной и химической промьштленности, в технологических npo-i цессах, связанных с намоткой длинномерных материалов на повышенных скорост.ях, преимущественно в производстве химических волокон, в процессах высокоскоростного формования, вытягивания и перематывания нитей , а также для наматывания паковок увеличенной массы, в особенности нитей текстильного ассортимента, чувствительных при наматывании на повышенных скоростях к наличию скольжения межоу телом намотки и приводным фрикционным цилиндром. Формулаизобре тения 1. Устройство для намотки нити, содержащее бобинодержатель, соединенный с электродвигателем, подключенным к регулируемому преобразователю частоты, нитераскладчик, прикаточный ролик, установленный с возможностью взаимодейтвия по образующей с паковкой и оединенный с приводным двигателем, вязанным с регулируемым источником
соединена со вторым входом широтно-им- пульсного модулятора, а выход шйротно- импульсного демодулятора связан с первым входом элемента сравнения.
вьшолнен многофазным, причем максимальгное число фаз определяется по формуле
А&О
где К - коэффициент (0,7-1,0)-,
6 - максимальный угол вылета
ротора.
Источники информации, принятые во внимание -при экспертизе - I. Патент ФРГ № 1246864, кл. 21 С 62/60, 1968.
./
ч «.
м.
фиг.
А v-orn
Фиг.
%.С
. м
f
фиг. 6
... J
I/A
фиг. т
Фиг.В
