той и седьмой вход и выход соответственно через пятый, шестой и седьмой блоки сопряжения - к входу и выходу трех вычислителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс автономных измерителей течения | 1983 |
|
SU1163272A1 |
| ЗОНД ГИДРОЛОГО-ОПТИКО-ХИМИЧЕСКИЙ | 2013 |
|
RU2551670C2 |
| Заякоренная профилирующая подводная обсерватория | 2015 |
|
RU2617525C1 |
| ЗАЯКОРЕННАЯ ПРОФИЛИРУЮЩАЯ ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2014 |
|
RU2545159C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2013 |
|
RU2546784C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Автономная гидрофизическая станция | 2021 |
|
RU2783188C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2449325C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
Изобретение относится к технике измерения скорости текущих сред и м жет ирпользоваться для измерения па раметров вертикального распределени горизонтальной скорости течения в океане. Известен измерительный комплекс для получения данных о распределени ях скорости течения в океане/ в котором используются акустические или электромагнитные измерители скорост течения с применением нескольких из мерительных баз TiJ. Недостатками данного комплекса являются низкие .быстродействие и до стоверность комплексных измерений гидрофизических характеристик профи ля скорости течения в океане в реаль ном масштабе эксперимента. Известен также -измерительный зон дирующий комплекс для получения дан ных о вертикальных распределениях горизонтальной скорости течений океане, в котором используется вращ ние чувствительных элементов вокруг . своей продольной оси для модуляции сигналов геомагнитным полем или поле течения и последующее выделение компонент вектора.скорости 2. При ЭТОМ не. устраняется влияние сноса устройства -течениями и имеет место сильная чувствительность измерителей от географической широты или величины скорости, поэтому .указанный зондирующий комплекс также не обеспечивает оперативных достоверных ком плексных измерений гидрофизических характеристик в реальном масштабе эксперимента. Известен также зо дирующий комплекс, профиля скоростей течения, содержащий корпус, измеритель гидроста тического дазвления, выход которого соединен с выходом коммутатора каналов, два акустических измерителя ско рости течения, измерительные базы ко торых ориентированы перпендикулярно продо.льной оси корпуса, а их парные выходы соединены соответственно с входами коммутатора каналов, измеритель угла азимута, подключенный к входу коммутатора, выход KOTopof o через преобразователь угол-временной HiA-epBcin соединен Ь входом коммутатора каналов, два выхода которого подключены к первым входам двух счет . чиков, к вторым вентильным входам которых подключен генератор опорной частоты, а выходы счетчиков через преобразователь кода и модулятор связи соединены кабель-тросом с бортовой аппаратурой, выход которой через приемник-демодулятор подключен к . входу магнитного регистратора и к выходу коммутатора бортовых измери.телей, причем один из его входов соединен с блоком управления, подключенным к входу приемника-демодулятора, а другой вход соединен с выходом измерителя изменения координат судна по данным радионавигационной системы СзЗВ данном комплексе невозможно оперативное определение достоверных геофизических характеристик профиля скоростей течения, т.е. одновременное определение текущих оценок гидрологических бд , гидроакустических 9а и дополнительных вд характеристик в реальном времени комплексных гидрофизических исследований океана, что резко ограничивает производительность таких исс.педований и достоверность получаемых (только после трудоёмкой обработки магнитных записей в вычислительном центре) результатов. Наиболее близким по технической сущности к предлагаемому является зондирующий комплекс профиля скоростей течения, содеркгидий погружаемый блок,, палубный блок, первый блок управления и блоки навигационных и метеосиноптических измерений, при этом погружаемый блок состоит из подводных измерительных преобразователей, выходы которых соединены с входами первого коммутатора, выход которого через аналого-цифровой преобразователь, первый преобразователь кодов и первый модем подключен к входу кабель-троса, второго блока управления, первый - четвертый выходы которого соединены соответственно с управляющим входом первого коммутатора, аналого-цифрового преобразователя, первого преобразователя кодов и первого модема, причем палубный б.док состоит из кабельTjjoca, выход которого через второй модем подключен к входу второго коммутатора, остальные входы которо-; го соединены с выходами палубных измерительных преобразователей, a управлямщий вход - с первым выходом третьего блокч управления, второй . выход которого подключен к управляющему входу второго модема. Погружаемый блок содержит измеритель гидростатического давления,° гидроскопическргй измеритель угла азимута и измерители углов отклонения продольной оси зонда от вертикали. Шходы измерителей соединены с входами коммутатора, выход которого через преобразователь угол-временной интервал совместно с выходом измерителя гидростатического давления подключен к первому и второму входам коммутатора каналов .соответст венно. Третий и четвертый, пятый и шестой, седьмой и восьмой входы коммутатора каналов соединены соответст венно с парными выходами трех взаимн перпендикулярных акустических измери телей скорости течения, причем измерительные базы первого и второго акустических измерителей ориентире ваны вдоль взаимно перпендикулярных поперечных осей корпуса, а измерительная база третьего акустического измерителя - по продольной оси корпуса. Первый и вто рой выходы коммутатора каналов соединены соответственно с первыми вхо дами вентилей двух счетчиков, вторые входы которых подключены к генератор опорной частоты, а выходы счетчиков соединены с выходами преобразователя параллельного кода в последовательны выход которого через модулятор связи подключен к входу кабель-тросовой линии связи Между погружаемым и палубным; блоками. Выход кабель-тросовой линии связи через приемник-демодулятор соединен с входом магнитного регистратора. К этому же входу подключен выход коммутатора бортовых из мерителей, к первому - пятому входам которого подключены соответственно выходы бортовых измерителей: курса судна, измерителя координат судна по данным радионавигационной системы, интервалов времени, дЛины сма- тнваемого кабель-троса и угла отклонения кабель-троса от поперечной пл кости судна. В состав зондирующего комплекса входит также блок управле ния, вход которого соединен с выходо приемника-демодулятора, а выход под ключен к шестому входу коммутатора бортовых измерений 4. Известный комплекс повышает по сравнению с комплексом ,3 точность измерений первичных параметров 0 профиля течений океана и дополнительных параметров б подводном и палубном блоках, но не обеспечивает достижения высокой производительно сти и достоверности одновременного определения текущих оцендк гидроло- гических бд, гидроакустических бд и дополнительных 0j в реальном teMТе комплексных гидрофизических исследований океана в силу того, что данный комплекс построен по радиальной жесткой деревовидной структуре, не соответствующей новейшим достижениям в области автоматизации судовых гидрофизических исследований океана и нов1ейших средств измерительной и вычислительной техники. Цель изобретения - повышение быстродействия и достоверности определения текущих оценок пространственно распределенных гидрофизических характеристик в реальном времени комплексных судовых исследований океана. Поставленная цель достигается тем,что в зондирующий комплекс профиля скоростей течения, содержащий погружаемый блок, палубный блок, первый блок управления и блоки навигационных и метеосйноптических измерений, при этом погружаемый блок состоит из подводных, измерительных преобразователей, вьтходы которых соединены с входами первого коммутатора,-выход когорого через аналого-цифровой преобразователь, первый преобразователь кодов и первый модем подключен к входу кабель-троса, второго блока управления, первый - четвертый выходы которого соединены соответственно с управляющим входом первого коммутатора, аналого-цифрового преобразователя, первого преобразователя кодов и первого модема, причем палубный блок состоит из кабель-троса, выход которого через второй модем подключен к входу второго коммутатора, остальные входы которого соединены с выходами палубных измерительных преобразователей, а управляющий вход - -с первым выходом третьего блока управления, второй выход которого Подключен к управляющему входу второго модема, введены канал связи, второй преобразователь кодов, первый блок сопряжения, первый блок цшн и блок вычисления гидрофизических характеристик включакядий в себя второй блок шин, семь блоков сопряжения, оперативное запрминающее устройство, перепрограммйруемое постоянное запоминающее устройство, четвертый блок управления и три вычислителя, причем выход второго колшутатора соединен через канал связи и второй преобразователь кодов с входом первого блока сопряжения, управляющий вход которого подключен к четвертому выходу тре1;ьего блока управления, третий вьлход которого соединен с управляющим входом второго преобразователя кодов, вход и выход первого блока сопряжения подключены к первым входу и выходу второго блока шин, вход и
ВЫХОД первого блока управления и блоков навигационных и метеосиноптических измерений через первый блок шин, восьмой блок сопряжения, четвертый блок управления и второй блок сопряжения соединены с вторым вхо- 5 дом и выходом второго блока шин, третий вход и выход которого подключены через третий блок сопряжения к входу и выходу оперативного запоминающего устройства, четвертый вход и 10 выход через четвертый блок сопряжения «- к входу и выходу, перепрограммируемого постоянного запоминающего устройства, а пятый,. шестой и седьмой входы и выход соответственно через tS пятый, шестой и седьмой блоки сопряжения - к- входу и.выходу трех вычислителей.
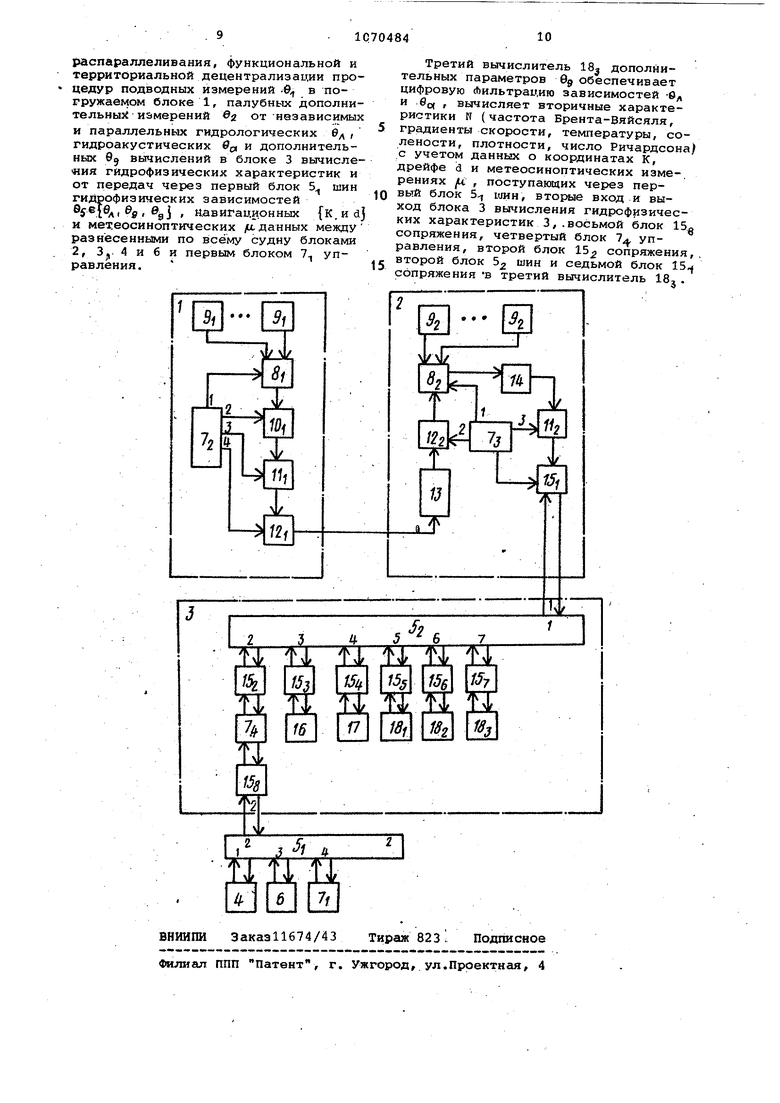
На чертеже приведена схема зондирующего комплекса профиля скоростей 20 течения.
Зондирующий комплекс состоит из погружаемого блока 1, палубного блока 2, блоков 3 вычисления гидрофизических характеристик, блока 4 нави- 25 гационных измерений, первого и второго б.локов 5 и 62 шин, блока б метеосиноптических измерений, первогочетвертого блоков управления,первого и второго коммутаторов 8 .и х,, Sg , подводных измернтелных 9-( и палубных измерительных Э преобразователей, аналого- цифрового преобразователя 10, первого и второго преобр.азователей 11 и ll кодов, перв-ого и второго модемов 12 и О, кабельтроса 13, канала 14 связи., первоговосьмого блоков сопряжения, оперативного 16 и .перепрогра.ммируемого постоянного 17 запоминающих устройств, а также первого-третьего вы- 40 числителей 18., 182 $ погружаемом блоке подводимые измерительные преобразователи 9 соединены с входами первого коммутатора 8, выход которого соединен с входом аналого- 45 цифрового преобразователя 10, выход которого подключен к входу первого преобразователя 11 кодов , выход которого соединен с первым модемом 12, первый-четвертый выходы второго гп блока 7 управления соединены с входами первых коммутатора 8, аналогоцифрового преобразователя 10 преобразователя 11 кодов и модема 12:,, выход которого соединен с выходом погружаемого блока 1. В. палубном блоке 2 вход кабель-троса 13 соединен через вход палубноуо блока 2 с выходом погружаемого блока 1, выход кабель-троса 13 через второй модем 12 и палубные измррительные преобразова- iO ели 9 соединен с входами второго коммута тора 8, выход которого соединен через первый канал 14 связи, и второй преобразователь И кодов с входом первого блока 15-j сопря- 65
жения, выход и вход которого соединены с выходом и входом палубного блока, Первый-четвертый выходы третьего блока 7д управления соединены с входами второго коммутатора 8 , Второго модема 12, второго преобразователя 11 кодов и первого блока 15 сопряжения, первые вход и выход которого соединены с первыми входом, и второго блока шин, BTOJ; jpыe-ceдьмыe вход и выход которого через второй-седьмой блоки 15,-157 сопряжения соединены с первьйми выходом и входом четвертого бло.ка 7 управления, с выходом и входом оперативного запоминающего устройства 16, перепрограммируемого постоянного запоминающего устройства 17 и первоготретьего вычислителей . Вторы вход и выход четвертого блока 7 управления через восьмой блок 15д сопржения соединены с вторыми входом и выходом первого блока 5 шин, первые третьи, четвертые вход и выход которого соединены с выходом и входом блока 4 навигационных измерений бло-ка 6 метеосиноптических измерений и первого блока 7 управления.
Для повышения быстродействия и достоверности определения текущих оценок гидрофизических характеристик океана в реальном времени комплексны судовых исследований океана организованы функционально и территориально распределенные и распараллеленные обработки подводных 0 , палубных 02 измерений и вычислений гидрологических @/ , гидроакустических QC( и дополнительных текущих характеристик, создана возможность гибкого .перераспределения вычислительных ресурсов между вычислителями , а также между блоками 3 вычисления гидрофизических характеристик, блоками-, навигационных 4 и метеосиноптических б измерений, обеспечена возможность, эффективного .использования новейших достижений в области создания высокоскоростных асинхронных блоков шин типов URIBVS, MULTIBVS, e-BVS, CP-lB.
Зондирующий комплекс профиля скоростей течения работает следующим образом.
В погружаемом блоке 1, например, в зоне в заданном К-м профиле океана выполняются измерения 9 , которые с выхода погружаемого блока 1 поступают на вход палубного блока 2, в котором выполняются вспомогательные измерения б и полученные результаты бз - +02 через выход и вход палубного блока поступают через первые вход и выход в блок 3 вычисления гидрофизических характеристик.
Данные о координатах К и дрейфе d судна с блока навигационных измерений через первые вход и выход первого блока 5 тин через его вторые вход и выход поступают на вторые вход и. выход блока 3 вычисления гидрофизических характеристик.
Метеосиноптические данные; измерений с блока б метеосиноптических 5 измерений через третьи вход и выход первого блока 5 шин через его вторые вход и ыхрд поступают на вторые вход и выход блока 3 вычисления гидрофизических характе|зйстик. to
Управление этими и аналогичньми процедурами асинхронного двунаправлен-ного обмена данными через первый блок 5 шин, а также вторичную обработку гидрофизических измерений {6 вы- 15 полняет первый блок 7,, управления с помощью его входа и выхода, подключенных к четвертым выходу и входу первого блока 5 шин.
В погружаемом блоке 1 второй блок 70 72 управления управляет измерениями 6 . По его сигналам управления с егс первого - четвертого выходов последовательно с помощью первого KOiviMyxaTOра в опрашиваются выходы подводных 25 измерительных преобразователей 9 (виброчастотный преобразователь давления, гироскопический и маятниковые .преобразователи углов отклонения,
акустические преобразователи скорости-течения и звука), и последователь ность данных измерений б,, подаётся на вход, первого аналого-цифрового преобразователя 10-,, в котором аналоговые данные измерений преобразуются в цифровые данные в форме двоичных 35 кодов, поступающих в первый преобразователь 11., кодов (параллельных двоичных в последовательные J, и с его выхода (в форме последовательности прямоугольных импульсов) измерения 40 9 поступают в первый модем 12. В подводные измерения а, в погружаемом блоке 1 входят глубина погружения L, углы отклонения зонда От оси ориентации Ч , от вертикали oi, от горизонтали ft , относительные скорости течения V звука С, температура Т и электрическая проводимость ж -.
С выхода первого модема 12 по цепочке через первый выход погружав- JQ мого блока 1, через вход палубного блока 2, через кабель-трос 13 и второй модем 122 на первый вход второго коммутатора 8, передаются подводные измерения ft,- При этом первый модем ее 12, кабель-трос 13 и второй модем 12 последовательно выполняют прямое частотное преобразование, передачу промодулированных на основе ЧИМ и об.: ратное частотное преобразование измерений в.Второй коммутатор 8 опрашива- ет второй модем 12 и палубные измеритель ные преобразователи 92 (преобразо ватели углов отклонения от вертикали кабель-троса 13, счетчик длины ка. бель-троса ), выполняющие вспомога- 65
тельные измерения в / и полученная общая последовательность измерений вз &- 2 через цепочку: первый канал 14 связи, второй преобразователь 112 кодов (из последовательчых в рараллельные двоичные передается на первый вход первого блока 15-, сопряжения. Управление преобразованием формы измерений вд и их передачей в палубном блоке 2 выполняет третий блок 7з управления. С выхода и входа первого блока 15 сопряжения через выход и вход палубного блока 2 измерения вз поступают через первые вход и выход блока 3 вычисления гидрофизических характеристик на первые вход и вьход второго блока S шин.
Управление асинхронными двунаправленными, передачами через второй блок 5g шин,через вторые выход и вход и йторой блок 15г сопряжения выполняет через первые выход и вход четвертый блок 7 управления.
Измерения 6j через второй блок 5 шин,, через его третьи выход и вход и через третий блок 15 сопряжения поступают в оперативное запоминающее устройство 16. Программы гидрофизических вычислений хранятся-в перепрограммируемом постоянном запоминающем устройстве 17 и через четвертый блок 15 сопряжения, четвертый выход и вход второго блока 5 шин могут передаваться через пятые - седьмые его выходы и входы и через пятыеседьмне блоки , сопряжения, н первые - третьи вычислители первичных гидрологических 0л г гидроакустических Qff и вспомогательных. 18 бр параметров. При зтом первый вычислитель 18 вычисляет зависимости температуры t,-, солености Xi и давления Pi , а также вьшолняет сглаживание и интерполяцию этих зависимостей. Второй вычислитель 182 вычисляет зависимости скорости течения V- и скорости звука С по всем координатам и разным базам (расстояние между аку стическими датчиками в подводных измерительных преобразователях 9,), обеспечивает пересчет составляющих этих параметров из системы отсчета погружаемого блока 1 в географическую систему координат с учетом палубных вспомогат.ельных измерений fijи данных о координатах К и дретйфе d судна, а также метеосиноптических данных (t..
Повьтшение быстродействия и достоверности комплексных измерений гидрофизических характеристик профиля скоростей течений океана в реальном времени эксперимента, в широких диапазонах глубины, в условиях сильного воздействия мешающих факторов (волнение, естественные и преднамеренные помехи I достигнуто за счет обеспечения во времени эксперимента
распараллеливания, функциональной и территориальной децентрализации процедур подводных измерений -в в погружаемом блоке 1, палубных дополнительный измерений 2 от независимых и параллельных гидрологических б/ i гидроакустических б и дополнительных 03 вычислений в блоке 3 вычисле«ия гидрофизических характеристик и от передач через первый блок 5 шин гидрофизических зависимостей %®.( fi 9i I навигационных {К.иа} и метеосиноптических /и. данных между разнесенными по всему судну блоками 2, 3,, 4 и 6 и первым блоком 7-, управления.
Третий вычислитель 18 дополнительных параметров Вд Обеспечивает цифровую Лильтрацию зависимостей -бд и 00, , вычисляет вторичные характеристики ГТ (частота Брента-Вяйсяля, градиенты скорости, температуры, солености, плотности, число Ричардсона с учетом данных о координатах К, дрейфе А и метеосиноптических изме-, рениях дс , поступа.к1щих через первый блок 5-, шин, вторые вход и выход блока 3 вычисления гидрофизических характеристик 3,.восьмой блок 15g сопряжения, четвертый блок 7 управления, второй блок 15 сопряжения,, второй блок 5 шин и седьмой блок 15л| сопряжения В третий вычислитель IS, .
| I, Патент Франции № 2271578, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Океанология, т, 13, вып, 6, 1973, с | |||
| СПОСОБ ПОЛУЧЕНИЯ ОКСИКИСЛОТ ИЗ ПРОДУКТОВ ОКИСЛЕНИЯ ВЫСЫХАЮЩИХ МАСЕЛ | 1920 |
|
SU1108A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| рительных преобразователей, а управу | |||
| лягощий вход - с первых выходом тре-- тьего блока управления, второй выход, которого подключен к управляющему входу второго модема, отличающийся тем, что, с целью повышения быстродействия и достоверности определения текущих оценок пространственно распределенных гидрофизических характеристик в реальном, темпе комплексных судовых исследований океана, в него введены канал связи, второй преобразователь кодов, первый блок сопряжения, первый, блок шин и блок вычисления гидрофизических характеристик, включающий в себя второй блок шин, семь блоков сопряже- с ния, оперативное запоминающее уст- ® ройство, перепрограммируемое посто(Л янное запоминающее устройство, четвертый блок управления и три вычислителя , причем выход второго коммутатора соединен через .канал связи и второй преобразователь кодов с входом первого блока сопряжения, управляющий вход которого подключен к четвертому выходу третьего блока уп равления, третий выход которого соединен, с управляющим входом второго о преобразователя кодов, вход и выход 4 первого блока српряжения подключены к первьдм входу и выходу второго блооо ка шин, вход и выход первого блока 4: управвления и блоков навигационных .и метеосиноптических измерений через первый блок шин, восьмой блок сопряжения, четвертый блок управления и второй блок сопряжения соединены с вторым входом и выходом второго блока шин, третий вход и выход которого подключены через третий блок сопряжения к входу и выходу оперативного запоминающего устройства, чет- вертый вход и выход через четвертый блок сопряжения - к входу и выходу перепрограммируемого постоянного за.поминающего устройства, а пятый, шее | |||
