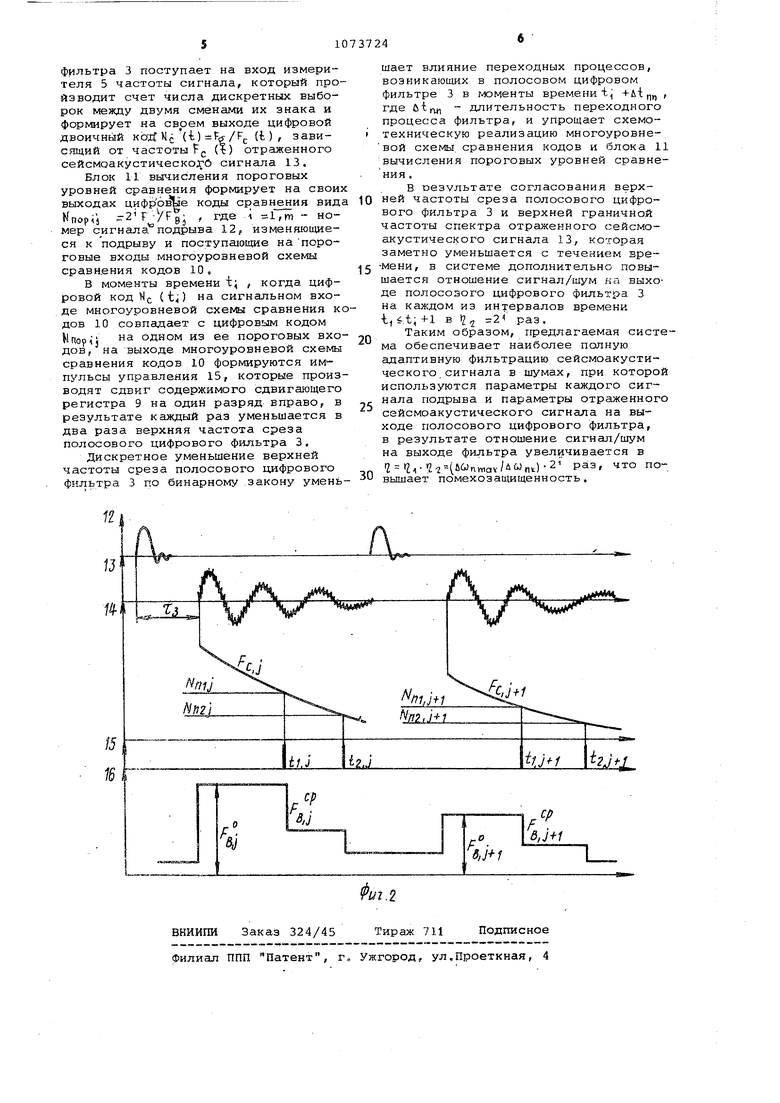
Изобретение относится к сейсморегистрирующей, технике для изучения по земных формаций и может быть использовано при морских геофизических работах на шельфе, акваториях и в океане , Известна цифровая сейсморегистрирующая система, содержащая последовательно соединенные буксируемое циф ровое приемное устройство, бортовой цифровой приемник, цифровой фильтр ,и регистратор, а также блок выявления дакона изменения частоты сигнал и блок управления цифровьгм фильтром где для повышения помехозащищенности с исте1«1ы верхняя частота среза цифрового фильтра за счет использования эффекта поглощения верхних частотных составляющих спектра отраженного сейсмоакустического сигнала уменьшается по бинарному закону l Однако известная система характеризуется ограниченной помехозащищен ностью, обусловленной отсутствием средств, обеспечивающих начальную установку верхней частоты среза циф рового фильтра с учетом ширины спект ра каждого сигнала подрыва, которая изменяется в широких пределах от подрыв а к подрыву, . Наиболее близкой к изобретению является Цифровая сейсморегистрирую щая система, содержащая последовательно соединенные буксируемое цифровое приемное устройство, бортоврй цифровой приемник, полосовой цифровой фильтр и регистратор, а также измеритель частоты сигнала и последовательн соединенные цифровой анализатор спектра подрыва, устройство определения нижней и начальной верхней частот среза фильтра и блок расчета коэффициентов системной функции филь тра, при этом вход цифрового анализатора спектра сигнала подрыва подключен к выходу бортового цифрового приемника, выход блока расчета коэффициентов системной функции фильтра соединен с управляющим входом полосового цифрового фильтра, выход которого подключен ко входу измерителя частоты сигнала. Повышение помехозащищенности системьг достигается путем предварительного согласования полосы пропускания цифрового фильтра и ширины спектра каждого сигнала подрыва 21 « Данная система обладает,также ограниченной помехозащищенностью обусловленной отсутствием средств, обеспечивающих текущее согласование верхней частоты среза полосового циф рового фильтра и верхней граничной частоты спектра полезного отраженного сейсмоакустического сигнала, которая с течением времени уменьшается Цель изобретения - повьаиение помехозащищенности цифровой сейсморегистрирующей системы путем предварительного согласования полосы пропускания цифрового фильтра и ширины спектра каждого сигнала подрыва и текущего согласования верхней частоты среза цифрового фильтра и верхней граничной частоты спектра отраженного сейсмоакустического сигнала. Поставленная цель достигается тем, что в цифровую сейсморегистрирующую систему, содержащую последовательно соединенные буксируемое цифровое приемное устройство, бортовой цифровой приемник, полосовой цифровой фильтр и регистратор,, а также измеритель частоты сигналг) и последовательно соединенные цифровой анализатор спектра сигнала подрыва, устройство определения нижней и начальной верхней частот среза фильтра и блок расчета коэффициентов системной функции фильтра, при этом вход цифрового . анализатора спектра сигнала подрыва подключен к выходу бортового цифрового приемника, выход блока расчета коэффициентов системной функции фильтра соединен с управляющим входом полосового цифрового фильтра, выход которого подключен к входу измерителя частоты сигнала, введены сдвигающий регистр, многоуровневая схема сравнения кодов и блок вычисле.ния.пороговых уровней сравнения, при этом сигнальный вход сдвигающего регистра, управляющий вход которого, соединен с выходом многоуровневой схемы сравнения кодов, а выход - с вторым входом блока расчета, коэффициентов системной функции фильтра, и вход блока вычисления пороговых уровней сравнения, выходы которого соединены с пороговыми входами многоуровневой схемы сравнения кодов, подключены к выходу устройства определения нижней и начальной верхней частот среза фильтра, причеёя выход измерителя частоты сигнала подключен к сигнальному входу многоуровневой схемы сравнения кодов. На фиг. 1 изображена структурная схема предлагаемой цифровой сейсморегистрирующей система; на фиг. 2 эпюры сигналов, поясняющие принцип действия системы. Цифровая сейсморегистрирующая система (фиг, 1) содержит последовательно соединенные буксируемое цифровое приемное устройство 1, бортовой цифровой приемник 2, полосовой цифровой фильтр 3 и регистратор 4, а также измеритель Ь частоты сигнала, и последовательно соединенные цифровой анализс1тор б спектра си-гнала подрыва, устройство 7 определения нижней и начальной верхней частот среза фильтра и блок 8 расчета коэффициентов системной функции фильтра, при этом вход цифрового анализатора 6 спектра сигнала подрыва подключен к выходу бортового цифрового приемника 2, выход блока 8 расчета коэффициентов системной функции фильтра, соединен с управляющим входом полос вого цифрового фильтра 3, выход кото рого подключен к входу измерителя 5 частоты сигнала, сдвигающий регистр 9, многоуровневую схему сравнения к дов 10 и блок 11 вычисления пороговых уровней сравнения, при этом сиг нальный вход сдвигающего регистра 9 управляющий вход которого соединен с выходом многоуровневой схемы срав нения кодов 10, а выход - с вторым входом блока 8 расчета коэффициенто системной функции фильтра, и вход блока 11 вычисления пороговых уровней сравнения, выходы которого соеди иены с пороговыми входами многоуров невой схемы сравнения кодов 10, под лючены к выходу устройства 7 опреде ления нижней и начальной верхней частот среза фильтра, причем выход измерителя Ь частоты сигнала подклю чен к сигнальному входу многоуровне вой схемы сравнения кодов 10. На фиг. 2 приведены сигнал подрыва 12, отраженный сейсмоакустический сигнал 13 одного из каналов буксируе мого цифрового приемного устройства 1, эпюры 14 изменения верхней частоты спектра отраженного сигнала 13, импульсы управления 15 на выходе мно гоуровневой схемы сравнения кодов 10 эпюра 16 перестройки верхней частоты среза полосового цифрового фильтра 3 Цифровая сейсморегистрирующая система работает следующим образом. Задержанный относительно сигнала подрыва 12 на время iv -2h/V, где Ь - глубина слоя исследуемой среды, от которого происходит первое отражение; V - скорость распространения сигнала в среде, сейсмоакустический сигнал 13, представляющий аддитивную смесь узкополосного полезного случайного сигнала и широкополосного шума, а .также сигнал подрыва 12, ширина спектра которого изменяется от подрыва к подрыву, поступают на соответствующие входы буксируемого циф рового приемного устройства 1, преобразуются в цифровую форму и последовательным двоичным кодом передаются на вход бортового цифрового приемника 2, где информация преобразуется в параллельные двоичные, коды. Дискретные выборки отраженного сейсмоакустического сигнала 13 поступают на вход полосового цифрового фильтра 3 и с его выхода поступают на вход регистратора 4. При этом на вход измерителя 5 частоты сигнала с выхода полосовогО цифрового фильтра 3 поступает лишь информация о знаке дискретных выборок, используемая для определения текущей частоты отфильтрованного сейсмоакустического сигнала. Цифровые коды сигнала подрыва 12 поступают на вход цифрового анализатора б спектра сигнала подрыва, который производит вычисление амплитудного дискретного спектра сигнала подрыва 12. Дискретные выборки амплитудного спектра сигнала подрыва поступают на вход устройства 7 определения нижней Рц и начальной верхней Р частот среза фильтра. Цифровой код Рц поступает на первый вход блока 8 расчета коэффициентов системной функции фильтра, код верхней частоты среза Гц поступает на сигнашьный вход сдвигающего регистра 9 и на вход блока 11 вычисления пороговых уровней сравнения. Блок 8 расчета коэффициентов системной функции фильтра вычисляет коэффициенты системной функции полосового цифрового фильтра 3, зависящие от частоты дискретизации F -1/t ia- аналоговой информации, порядка цифрового фильтра, значений верхней и нижней частот среза фильтра, при этом цифровой код верхней частоты среза фильтра поступает с выхода сдвигающего регистра 9 на второй вход блока 8 расчета коэффициентов системной функции фильтра. При общем времени вычисления амплитудного дискретного спектра сигнала подрыва 12 и значений Г, меньшем или равным времени задержки С-, отраженного сейсмоакустического сигнала 13 полоса пропускания полосового цифрового фильтра 3 будет, таким образом, предварительно согласована с шириной спектра каждого сигнала подрыва, которая изменяется в широких пределах от подрыва к подрыву. Предварительное согласование полосы пропускания полосового цифрового фильтра 3 и ширины спектра каждого сигнала подрыва 12 обеспечивает повышение отноиения сигнал -/шум на выходе полосового цифрового фильтра 3 в 7, ruOrimax/A nK РЗЗ гдейО глах максимальная ширина спектра сигнала подрыва Uи ц - ширина спектра текущего сигнала подрыва 12. Дальнейшее увеличение отношения сигнал/шум на выходе полосового цифрового фильтра 3 в системе достигается путем согласования верхней частоты срезав ц полосового цифрового фильтра 3 и верхней граничной частоты FB отраженного сейсмоакустического сигнала 13, которое производится следующим образом. Информация о знаке дискретных выборок с выхода полосового цифрового
фильтра 3 поступает на вход измерителя 5 частоты сигнала, который производит счет числа дискретных выборок между двумя сменами их знака и формирует на своем выходе цифровой двоичный KOrf Vlr(-t) %/F(- (t) , зависящий от частоты F(, (t) отраженного сейсмоакустическо гО сигнала 13. Блок 11 вычисления пороговых уровней сравнения формирует на свои выходах цифровУе коды сравнения вид
2Г-УТ
К
где 1 1,т - ноВз
nopij
мер си г нала подрыв а 12 изменяющиеся к подрыву и поступающие на пороговые входы многоуровневой схемы сравнения кодов 10.
В моменты времени т; , когда цифровой код We (t) на сигнальном входе многоуровневой схемы сравнения кдов 10 совпадает с цифровым кодом J4nop,i на одном из ее пороговых входов, на выходе многоуровневой схемы сравнения кодов 10 формируются импульсы управления 15, которые производят сдвиг содержимого сдвигающего регистра 9 на один разряд вправо, в результате каждый раз уменьшается в два раза верхняя частота среза полосового цифрового фильтра 3.
Дискретное уменьшение верхней частоты среза полосового цифрового фильтра 3 по бинарному .закону уменьшает влияние переходных процессов, возникающих в полосовом цифровом фильтре 3 в г-юменты времени ij где utrui длительность переходного процесса фильтра, и упрощает схемотехническую реализацию многоуровневой схемы, сравнения кодов и блока 11 вычисления пороговых уровней сравнения ,
В результате согласования верхней частоты среза полосового цифрового фильтра 3 и верхней граничной частоты спектра отраженного сейсмоакустического сигнала 13, которая заметно уменьшается с течением вре5 -мени, в системе дополнительно повышается отношение сигнал/шум ка выходе полосового цифрового фильтра 3 на каждом из интервалов времени I, i,t; +1 в 12, раз.
Таким образом, предлагаемая система обеспечивает наиболее полную адаптивную фильтрацию сейсмоакустического.сигнала в шумах, при которой используются параметры каждого сигнала подрыва и параметры отр;аженного сейсмоакустического сигнала на выходе полосового цифрового фильтра, в результате отношение сигнал/шум на выходе фильтра увеличивается в Z Zi-Z-24 av/i nO-2 раз, что повышает помехозащищенность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная цифровая сейсморегистрирующая система | 1982 |
|
SU1032419A1 |
| Цифровая сейсморегистрирующая система | 1981 |
|
SU1013883A1 |
| Многоканальная цифровая сейсморегистрирующая система | 1981 |
|
SU991343A1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СЕЙСМОРЕГИСТРИРУЮЩАЯ СИСТЕМА ДЛЯ МОРСКИХ ИССЛЕДОВАНИЙ | 2021 |
|
RU2781800C1 |
| Цифровая система измерения глубинного положения буксируемых акустических преобразователей | 1984 |
|
SU1183933A1 |
| Многоканальная цифровая сейсморегистрирующая система | 1981 |
|
SU972434A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЯ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО ГЕОФИЗИЧЕСКОГО СУДНА | 2010 |
|
RU2424538C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ЧАСОВ | 2000 |
|
RU2177167C2 |
ЦИФРОВАЯ СЕЙСМОРЕГИСТРИРУЮЩЯ СИСТЕМА, содержащая последовательно соединенные буксируемое цифровое приемное устройство, бортовой цифровой .приемник, полосовой цифровой фильтр и регистратор, а также измеритель частоты сигнала и последовательно .соединенные анализатор спектра сигнала подрыва, устройство определения нижней и начальной верхней частот среза фильтра и блок рас чета коэффициентов системной функции фильтра, при этом выход цифрового анализатора спектра сигнала подрыва подключен к выходу бортового цифрового приемника, выход блока расчета коэффициентов системной функции фильтра соединен с управляющим входом полосовго фильтра, выход которого подключен к входу измерителя частоты сигнала, отличающаяся тем, что, с целью повышения помехозащищенности цифровой сейсморегистрирующей системы, она содержит сдвигающий регистр, многоуровневую схему сравнения кодов и блок вычисления пороговых уровней сравнения, при этом сигнальный вход сдвигающего регистра, управляющий вход которого соединен с выходом многоуровневой схемы сравнения кодов, а выход - с вторым входом блока расчета коэффици-) (Л ентов системной функции фильтра, и вход блока вычисления пороговых уровней сравнения, выходы которого соединены с пороговыми входами многоуровневой схемы сравнения кодов, подклю- с чены к выходу устройства определения нижней и начальной верхней частот среза фильтра, причем выход измерителя частоты сигнала подключен к сигнальному входу многоуровневой схемы сравнения кодов. со ю
15 16
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вакуум-присосное устройство | 1955 |
|
SU107034A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3429134/18-25, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
