2. Цифровая система по п. 1, о тличающаяся .тем, что измеритель временных интервалов выполнен в виде трех триггеров, трех логических схем И и трех счетчиков, причем установочные входы триггеров соединены с выходом порогового устройства,- а единичное выходы - с первыми входами соответствуняцих логических схем И, вторые входы последних объединены .и подключены к генератору опорной частоты, выход первой логической схемы И подключен к счетному входу второго разряда первого счетчика, выход второй логической схемы И - к счетному входу первого разряда первого счетчика и к входу второго счетчика, а выход третьей логической схемы И - к входу третьего счетчика, выходы счетчиков являются выходами измерителя временных интервалов.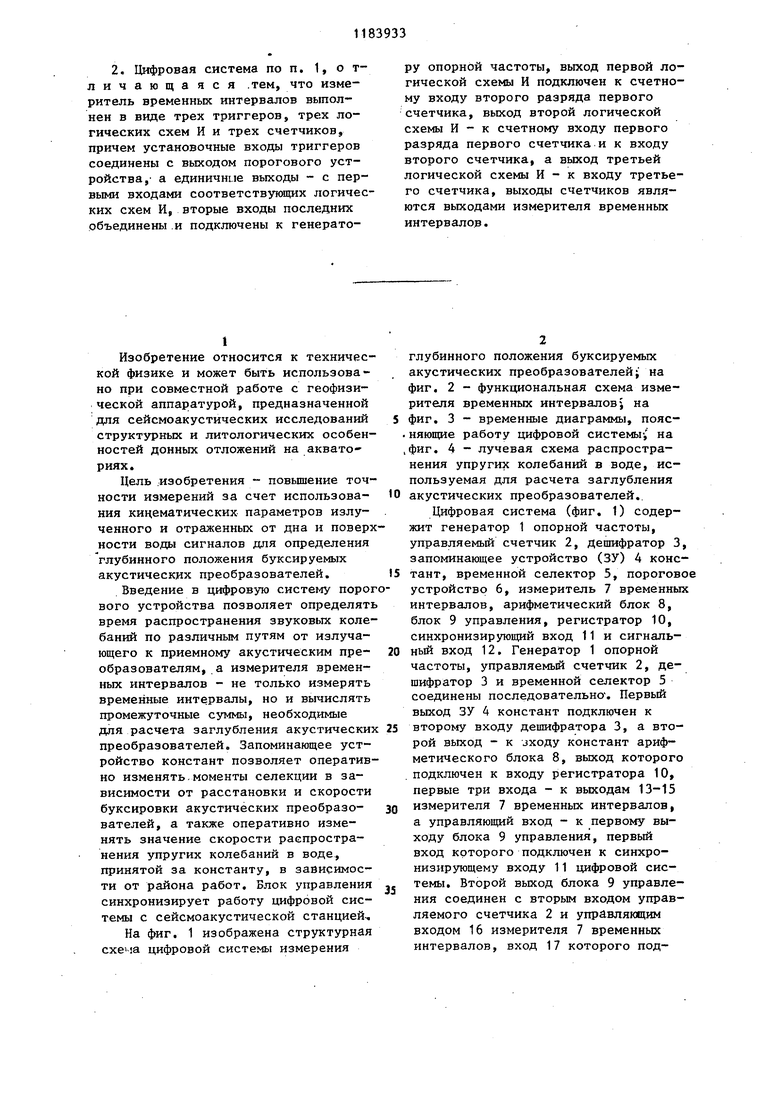

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения коэффициента отражения от дна водоема | 1985 |
|
SU1518818A2 |
| Аппаратура для картирования грунтов дна водоема | 1984 |
|
SU1188687A1 |
| Устройство для определения коэффициента отражения от дна водоема | 1980 |
|
SU949586A1 |
| Способ регистрации временного акустического разреза и устройство для его осуществления | 1985 |
|
SU1323991A1 |
| Устройство для определения коэффициента отражения от дна водоема | 1980 |
|
SU934410A1 |
| Цифровая система измерения глубинного положения морской пьезосейсмографной косы | 1976 |
|
SU894640A1 |
| Приемный тракт устройств ультразвукового контроля | 1988 |
|
SU1681231A1 |
| Устройство для измерения интервалов времени | 1977 |
|
SU964570A1 |
| Ультразвуковой дефектоскоп для контроля сварных швов | 1986 |
|
SU1388786A1 |
| Измеритель дифференциальной фазы | 1980 |
|
SU1104436A1 |
1. ЦИФРОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ГЛУБИННОГО ПОЛОЖЕНИЯ БУКСИРУЕМЫХ АКУСТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ, содержащая генератор опорной частоты, управляемый счетчик, дешифратор и временной селектор, соединенные последовательно, и регистратор, о т л и- чающаяся тем, что,с целью повышения точности измерения, в нее введены пороговое устройство, измеритель временных интервалов, арифметический блок, блок управления и запоминающее устройство констант, пер- вьш выход последнего подключен к второму входу дешифратора,а второй выход - к входу констант арифметического блока, выход которого подключен к входу регистратора, первые три входа - к соответствующим выходам измерителя временных интервалов, а управляющий вход - к первому выходу блока управления, первый вход которого является синхронизирующимвходом системы, а второй выход соединен с вторым входом управляемого Ш счетчика и управляющим входом измерителя временных интервалов, первый ko вход последнего подключен к выходу генератора опорной частоты, а второй вход - к выходу порогового устройства и к вторым входам блока управления и временного селектора,, выход последнего соединен с первым входом порогового устройства,, второй вход 00 00 которого является сигнальным входом цифровой системы. со 00 оо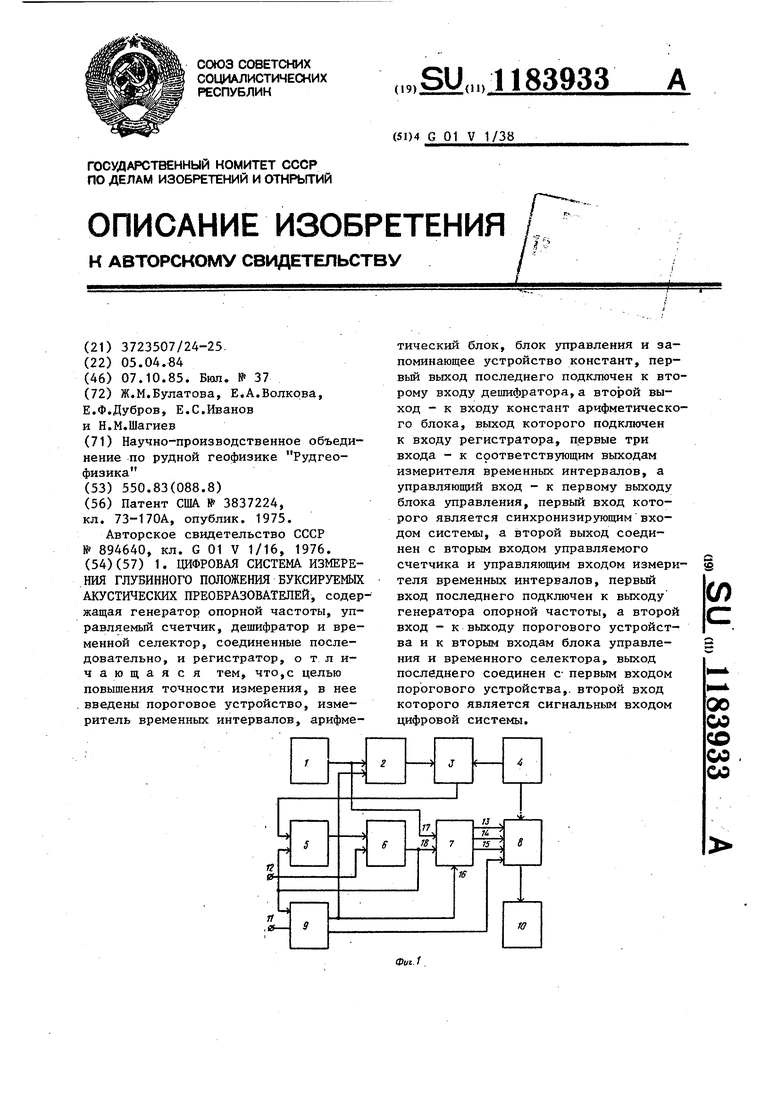
1
Изобретение относится к технической физике и может быть использовано при совместной работе с геофизической аппаратурой, предназначенной для сейсмоакустических исследований структурных и литологических особенностей донных отложений на акваториях.
Цель .изобретения - повьшение точности измерений за счет использования кинематических параметров излученного и отраженных от дна и поверхности воды сигналов для определения глубинного положения буксируемых акустических преобразователей.
Введение в цифровую систему порогвого устройства позволяет определять время распространения звуковых колебаний по различным путям от излучающего к приемному акустическим преобразователям, а измерителя временных интервалов - не только измерять временные интервалы, но и вычислять промежуточные суммы, необходимые для расчета заглубления акустических преобразователей. Запоминающее устройство констант позволяет оперативно изменять.моменты селекции в зависимости от расстановки и скорости буксировки акустических преобразователей, а также оперативно изменять значение скорости распространения упругих колебаний в воде, принятой за константу, в зависимости от района работ. Блок управления синхронизирует работу цифровой системы с сейсмоакустической станцией-.
На фиг. 1 изображена структурная cxe-ia цифровой системы измерения
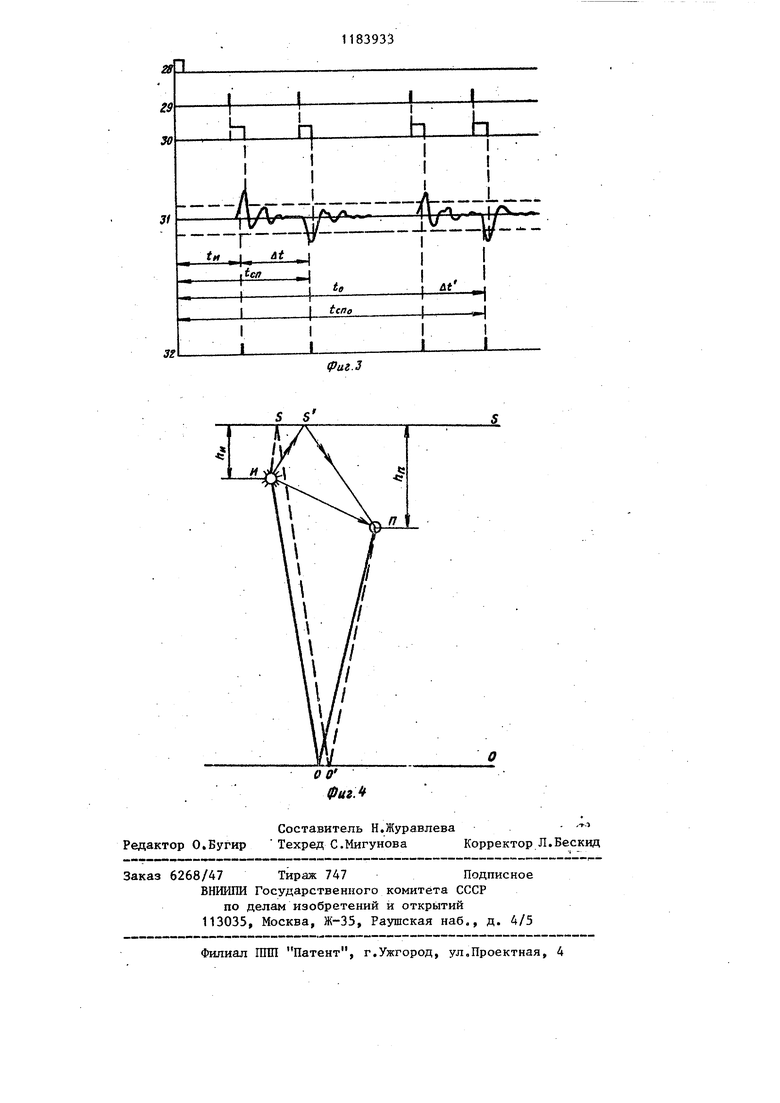
глубинного положения буксируемых акустических преобразователей; на фиг. 2 - функциональная схема измерителя временных интерваловj на фиг. 3 - временные диаграммы, пояс. няющие работу цифровой системы- на ,фиг. 4 - лучевая схема распространения упругих колебаний в воде, используемая для расчета заглубления акустических преобразователей..
Цифровая система (фиг. 1) содержит генератор 1 опорной частоты, управляемый счетчик 2, Дешифратор 3 запоминающее устройство (ЗУ) 4 констант, временной селектор 5, порогов устройство 6, измеритель 7 временны интервалов, арифметический блок 8, блок 9 управления, регистратор 10, синхронизирующий вход 11 и сигнальный вход 12. Генератор 1 опорной частоты, управляемый счетчик 2, дешифратор 3 и временной селектор 5 соединены последовательно . Первый выход ЗУ 4 констант подключен к второму входу дешифратора 3, а второй выход - к зходу констант арифметического блока 8, выход которого . подключен к входу регистратора 10, первые три входа - к выходам 13-15 измерителя 7 временных интервалов, а управляющий вход - к первому выходу блока 9 управления, первый вход которого подключен к синхронизирующему входу 11 цифровой системы. Второй выход блока 9 управления соединен с вторым входом управляемого счетчика 2 и управляющим входом 16 измерителя 7 временных интервалов, вход 17 которого подключей к выходу генератора 1 опорной/ частоты, а вход 18 - к выходу порогового устройства 6 и к вторым входам блока 9 управления и временного селектора 5, выход последнего соединен с первым входом порогового устройства 6, второй вход которого подключен к сигнальному входу 12 цифровой системы.
Измеритель 7 временных интервало выполнен в виде трех триггеров 1921, трех логических схем И 22-24, трех счетчиков 25-27. Вход S триггера 19 подключен к управляющему входу 16, а остальные входы всех триггеров соединены с входом 18. Единичные выходы триггеров 19-21 соединены с первыми входами логических схем И 22-24, вторые входы которых объединены и подключены к входу 17. Выход логической схемы И 22 подключен к счетному входу второго разряда счетчика 25. Выход логической схемы И 23 подключен к счетному входу первого разряда счетчика 25 и к входу счетчика 26, Выход логической схемы И 24 подключен к входу счетчика 27. Выход счетчика 25 подключен к выходу 13, выход счетчика 26 - к выходу 14, а выход счет чика 27 - к выходу 15.
Цифровая система предназначена для совместной работы с геофизической аппаратурой, например морскими акустическими или. сейсмоакустическими станциями, именщими в своем составе буксируемые акустические преобразователи, глубинное положение которых необходимо регистрировать в процессе проведения работ. Обычно такие станции имеют один излучающий акустический и один или несколько приемных акустических преобразователей, заглубленных под поверхностью воды на глубину h и hj,, буксируемых судном. В зависимости от скорости буксировки и состояния водной поверхности глубинное положение акустических преобразователей меняется. При этом важн знать заглубление акустических преобразователей в момент приема полезных сигналов. Применяемые в настоящее время механические датчики давления в силу своей инерционности не могут обеспечить точное измерени глубинного положения акустических преобразователей в момент приема. Онако, если использовать кинематические параметры принимаемых полезных сигналов, то можно точно рассчитать заглубление акустических преобразователей непосредственно в момент приема сигналов.
На фиг. 4 приводится лучевая схема распространения упругих колебаний от излучающего-акустического преобразователя (и) к приемному акустическому преобразователю (П) с учетом отражения волн от поверхности воды (S) и дна (0) при буксировке акустических преобразователей за кормой судна-носителя с разносом приемной и излучающей линий на некотором расстоянии. При возбуждении упругих колебаний к приемному акустическому преобразователю последовательно приходят со своими временами вступлений (t) следующие волны: прямой излученный сигнал по пути ИП (Ц); сигнал, отраженный от поверхности воды по пути ИЗП, спутник излученного сигнала (t), отраженный сигнал от дна по пути ИОП (to), спутник отраженного сигнала по пути ИЗО П
(Чп)Учитывая, что заглубление h и
h и разнос. ИП меньше глубины до дна акватории, угол ИЗО близок к О, а пути, пройденные спутником отраженного сигнала и сигналом, отраженным от дна, различаются на удвоенное заглубление излучателя. Тогда
-(спГМт(1)
2где С - скорость распространения
упругой волны в воде. Из треугольников ИЗП и ИЗП определяется заглубление приемника
1 С ( с &i(, п-2 t,« -t, - 4i
СП
(1)
Если излучающий и приемный акустические преобразователи изменяют свое взаимное расположение, то в приведенных формулах производится взаимное изменение индексов, относящихся .к их заглублению.
В некоторых практических случаях достаточно знать лишь среднее заглубление акустических преобразователей.
Из треугольника ИЗП с некоторым приближением определяется среднее заглубление h,,, по формуле ,.). - (3) Командный импульс 28 (фиг. 3), синхронизирующий процесс возбуждения упругих колебаний в воде, поступает через синхронизирующий вход 11 цифровой системы на блок 9 управления, где по его переднему фронту формирую ся сигналы запуска управляемого счетчика 2 и измерителя 7 временных интервалов. По сигналу запуска управ ляемый счетчик 2 производит подсчет импульсов, поступающих с генератора опорной частоты. Параллельный код чи ла импульсов с управляемого счетчика 2 подается на первый вход дешифра тора 3, на второй вход которого поступают коды моментов селекции с ЗУ А констант, представляющие собой коды временных интервалов от сигнала запуска до появления излученного (,), спутника излученного (t.), отраженно го от дна tp и спутника отраженного от дна (t ) сигналов, взятые с некоторым (заранее заданным) опережением Т . При совпадении текущего кода числа импульсов с кодом одного из моментов селекции в дешифраторе 3 вырабатываются импульсы 29, которые поступают на временной селектор 5, где формируются временные окна 30 для селекции соответствующих сигналов . . Через сигнальный вход 12 цифровой системы подаются сигналы 31 с приемного акустического преобразователя на пороговое устройство 6, в котором производится сравнение их с заранее установленным уровнем. При превышении этого уровня в пороговом устройстве 6 вьфабатьтаются импульсы 32 превышения порога, которые подаются на блок 19 управления, на измеритель 7 временных интервалов и времен ной селектор 5, в последнем по этим импульсам прекращается формирование временных окон, В измерителе 7 временных интервалов (фиг. 2) импульс запуска, поступивший с блока 2 управления на вход S триггера 19 через вход 16, устанавли вает триггер 19 в единичное состояни разрешая тем самым прохождение импул сов с генератора 1 опорной через вход 17 и логическую схему И 2 на счетный вход второго разряда счет чика 25. Такое включение счетчика 25 позволяет получить удвоенный временной интервал t, т.е. 2tj, необходимый для вычисления выражений (2) и (3). При поступлении первого импульса превышения через вход 18 на вход R триггера 19 и вход S триггера 20 прекращается прохождение импульсов через логическую схему, И 22, а разрешается прохождение импульсов через логическую схему и 23, импульсы с которой поступают на счетньй вход первого разряда счетчика 25 и вход счетчика 26.Второй импульс превышения порога поступает через вход 18 на вход R триггера 20 и устанавливает его в нулевое состояние, запрещая тем самым прохождение импульсов через логическую схему И 23. В это; j время на счетчике 25 сформирован код (2tj, + ut,), а на счетчике 26 код 4t,. Третий импульс превышения порога поступает через вход 18 на вход S триггера 21, разрешая прохождение импульсов с генератора 1 опорной частоты через логическую схему И 24 на счетчик 27. Четвертый импульс превышения порога поступает через вход 18 на вход R триггера 21, устанавливает его в нулевое состояние и запрещает прохождение импульсов через ..логическую схему И 24. На счетчике 27 сформирован код 4Sto. Код (2ty +At) подается на арифметический блок через выход 13, код jitj - через выход 14, а код 4tQ. - через выход 15. В блоке 9 управления производится подсчет импульсов превьш1ения порога и после прихода четвертого импульса формируется команда на вьтолнение расчета заглубления акустических преобразователей, которая подается на арифметический блок 8. По этой команде производится вычисление выраже- . НИИ (1), (2) и (3). Константа С/2, входящая в эти выражения, хранится в ЗУ 4 констант. Причем в зависимости от района работ значения константы могут меняться. Вычисленные значения заглубления hy , h f, или h, подаются на регистра-тор 10, где.регистрируются в цифровом виде или в виде графика. Принципиальная возможность определения заглубления hy, Ь„ и п по приведенным формулам доказана по измерениям,, выполненным на акватории моря, с использованием аппаратуры звуковой геолокации (стратографа). В таблице приведены полученные заглубления излучающего и приемного акустических кГГ noJr образом, предлагаемая цифровая система позволяет определять заглубление как излучателя, так и
Вход17
.Z приемного устройства, а также их Раднее заглубление.в то время как известные устройства определяют одну j из этих величин (или требуется два датчика)треоуется два
28
га
30
| Патент США № 3837224, кл | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Цифровая система измерения глубинного положения морской пьезосейсмографной косы | 1976 |
|
SU894640A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
