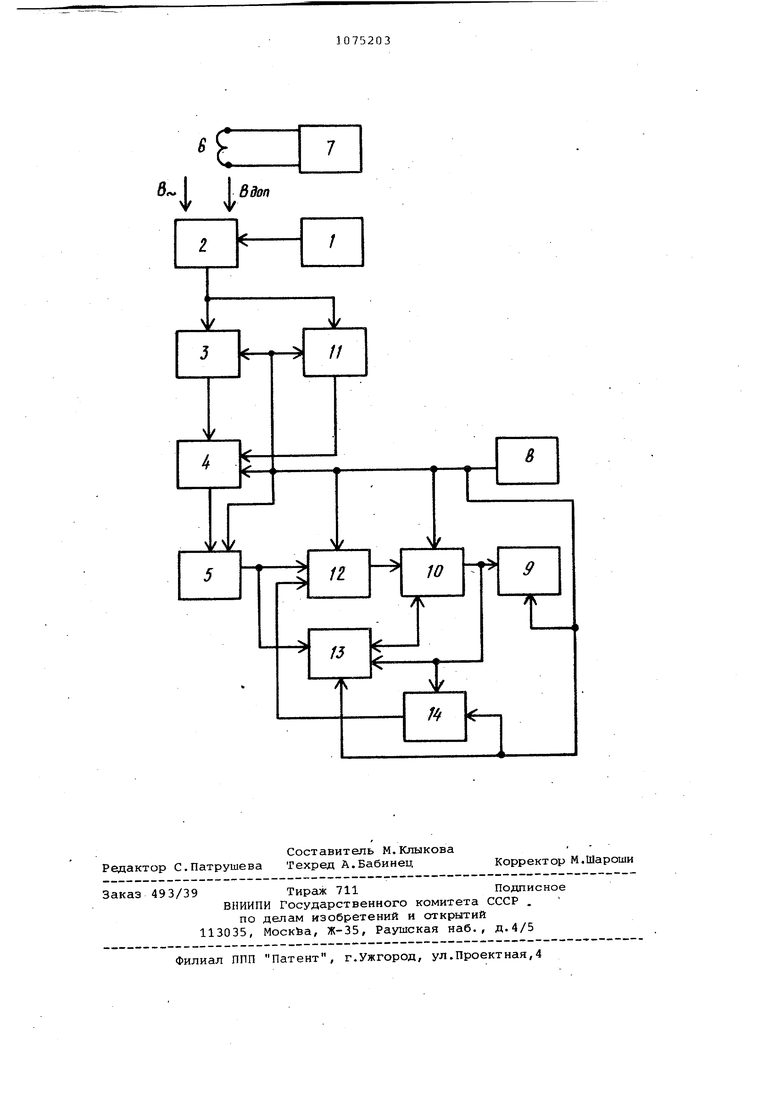
Изобретение относится к магнитны измерениям и может быть использован для прецизионного измерения в широком частотном диапазоне индукции пе ременных магнитных полей. Известен цифровой измеритель маг нитной индукг.ии, предназначенный дл измерения индукции постоянных и Пер менных магнитных полей, который сос тоит из датчика Холла, автоматичес- кого переключателя, преобразователя напряжение-код и цифрового отсчетно го устройства. При питании датчика Холла от генератора постоянного ток данным устройством можно измерять переменное магнитное поле в широком частотном диапазоне l . Однако данному устройству свойст венна невысокая точность измерения из-за наличия мультипликативной погрешности, обусловленной нестабильностью параметров датчика Холла, тока питания датчика и электрических параметров схемы. Наиболее близким по технической сущности к предлох енному является устройство для измерения переменной магнитной индукции, содержащее последовательно соединенные генератор постоянного тока, датчик Холла, формирователь переменной составляющей, автоматический переключатель и преоб разователь напряжение-код, катушку,; подключенную к стабилизатору постоянного тока, последовательно соединенные блок управления и цифровой отсчетный блок, вход которого соединен с выходом блока управления, а выход - с вторым входом цифрового отсчетного блока, формирователь постоянной составляющей, первый вход которого соединен с первым входом формирователя переменной составляющей , второй вход - с вторымивходами формирователя переменной составляющей, преобразователя напряжениекод и автоматического переключателя и с 5ыходом блока управления, а выход - с третьим входог1 автоматического переключателя Однако при наличии ферромагнитных масс вблизи датчика -Холла в момент измерения точность измерения устройства значительно снижается, Цель изобретения - повышение точности измерения. Поставленная цель достигается тем, что в цифровой измеритель переменной магнитной индукции, содержащей последовательно соединенные генератор постоянного тока, датчик Холла, формирователь переменной соетавляющей, автоматический переключатель и преобразователь напряжениекод, катушку, подключенную к стабилизатору постоянного тока, последог вательно соединенные блок управления и цифровой отсчетный блок, делительный блок, вход которого соединен с выходом блока управления, а выход с вторым входом цифрового отсчетного блока, формирователь постоянной составляющей, первый вход которого соединен с первым входом формирователя переменной составляющей, второй входс вторыми входами формирователя переменной составляющей, преобразователя напряжение-код и автоматического переключателя и с выходом блока управ ления, а выход - с третьим входом автоматического переключателя, дополнительно введены первый и второй блоки 2И-ИЛИ и регистр, при этом первые входы блоков 2И-ИЛИ соединены с выходом преобразователя напряжение-код, |а выходы - с соответствующими входами делительного блока, выход которого связан со вторым входом второго блока 2И-ИЛИ и первым входом регистра, второй вход которого соединен с третьим входом второго блока 2И-ИЛИ и первым входом цифрового отсчетцого i блока, а выход - с вторым входом пер-, вого блока 2И-ИЛИ. На чертеже приведена блок-схема предлагаемого устройства. Цифровой измеритель переменной магнитной индукции содержит последовательно соединенные генератор 1 постоянного тока, датчик 2 Холла, формирователь 3 переменной составляющей, автоматический переключатель 4 и преобразователь 5 напряжение-код, катушку б, подключенную к стабилизатору 7 постоянного тока, последовательно соединенные блок 8 управления и цифровой отсчетный блок 9, делительный блок 10, вход которого соединен с выходом блока 8 управления, а выход с вторым входом цифрового отсчетного блока 9., формирователь 11 постоянной составляющей, первый вход которого соединен с первым входом формирователя 3 переменной составляющей, второй вход - с вторыми входами формирователя 3 переменной составляющей, преобразователя 5 напряжение-код и автоматического переключателя 4, а-- , также с выходом блока 8 управления, а выход - с третьим входом автоматического переключателя 4, первый и второй блоки 12 .и 13 2И-ИЛИ и регистр 14, при этом первые входы блоков 12 и 13 2И-ИЛИ соединены с выходом преобразователя 5 напряжение-код, а выходы - с соответствующими входами делительного блока 10, выход которого связан со вторым входог второго блока 13 2И-ИЛИ и первым входом регистра 14, второй вход которого соединен с третьим входом второго блока 13 2И-ИЛИ и входом цифрового отсчетного блока 9, а выход - с вторым входом блока 12 2И-ИЛИ. Измеритель рабо,тает следующим образом. Сигналом начальнойустановки, поступающим с блока 8 управления на преобразователь 5, блок 10 и регистр 14 подготавливаются к циклу измерения. Выходной сигнал датчика 2 Холла, пропорциональный измеряемой индукци 6л. и индукции допол.нительного магнитного поля Вдоп создаваемого катушкой б, по обмотке которой проте.кает ток от стабилизатора 7 постоян ного тока, поступает на формирователи 3 и 11 постоянной и переменной составляющих и,О„51в 6доп.1, чувствительность датч ка Холла и индукции, „ - ток питания датчика Холла. Цикл измерения состоит из четырех тактов. В первый такт на преобразователь 5 напряжение-код через автоматический переключатель 4 поступает переменная составляющая выходного сигна ла датчика 2 Холла. Она выделяется формирователем Зи преобразуется .им в постоянный ток. Код h выходного регистра преобразователя 5 напряжение-код, соответствующий инлукции переменного магнитного поля В реписывается через второй блок 13 2И-ИЛИ на второй вход делительного блока 10. Н,-5П„-В -К,, де 4 - коэффициент преобразо вания формирователя 3 переменной составляющей, - коэффициент преобразо вания преобразователя 5 напряжение-код. Во второй такт коммутации на пре образователь 5 напряжение-код посту пает постоянная составляющая выходного сигнала датчика 2 Холла. Она выделяется формирователем 11. Коп выходного регистра преобразователя 5 напряжение-код поступает через первый блок 12 2И-ИЛИ на первый вхо делительного блока 10. И2-5кЗпБдопК2 -
К,
коэффициент преобразодевания формирователя 11
постоянной составляющей ,
АОП
индукция дополнительного магнитного поля, создаваемого катушкой б при наличии ферромаг-65
нитных масс вблизи датчика 2 Холла в момент измерения. В третий такт после поступления управляющего сигнала с блока 8 делительный 10 совершает операцию деления N на Nj . Результат деления будет 4 o ilnЪm Вт К «2 бКЬ&допКэьлоп Ч Если полученное выражение поделим на поправочный коэффициент Р Go/C и учтем, что 1 on С , то результат деления не будет зависеть от изменения постоянной катушки б при наличии ферромагнитных масс вблизи датчика 2 Холла в момент измеренияW, 6 Чоп-С- о/с Т.е. делительный блок 10 зафиксирует в виде статического кода число импульсов, пропорциональное измеряемой индукции переменного магнитного поля BU и не зависящее от нестабильности тока питания датчика 2 Холла, его параметров, коэффициента преобразования устройства, при стабильных коэффициентах преобразования К и К формирователей 3 и 11 постоянной и переменной составляющих. Если значение индукции дополнительного магнитного поля при отсутствии ферромагнитных масс вблизи датчика 2 Холла принять за единицу измеряемой величины, то результат измерения будет пропорционален измеряемой индукции переменных магнитных полей. Перед циклом измерения производится определение поправочного коэффициента , равного отношению постоянных катушек 6 при отсутствии и Нсшичии ферромагнитных масс вблизи датчика 2 Холла в момент измерения. Определение коэффициента Р основано на следующем. Магнитная индукция дополнительного поля, создаваемого дополнительной катушкой б, определяется выражениями Аоп° АОПCQ, Aon Из приведенных уратзнений имеем Таким образом, коэффициент Р можно определить, если известны в момент измерения значения дополнительного магнитного поля, создаваемого катушкой 6, в поле которой находится датчик 2 Холла, при наличии и отсутствии ферромагнитных масс вблизи датчика 2 Холла. Перед измерением измерительный зонд с датчиком 2 Холла выдерживается некоторое время возле объекта измерения, чтобы во всем объеме измерительного зонда установилась температура исследуемого объекта. Определение коэффициента Р производится за два такта коммутации. В первый такт на преобразователь 5 напряжение-код через автоматический переключатель 4 поступает постоянная составляющая выходного сигнала датчика 2 Холла. Она выделяется фор мирователем 11. Код Nj выходного регистра преобразователя напряжение код поступает через первый блок 2И-ИЛИ 12 на первый вход делительного блока 10 - второй такткоммутации датчика 2 Холла удаляется на такое расстояние от ферромагнитных масс, что они не оказывают влияния на постоян ную катушку 6, т.е. ее постоянная будет равна С. Так как за время удаления датчика 2 Холла от ферромагнитных масс температура измерительного зонда,в котором находится датчик 2 Холла, практически не изменяется, то чувствительность датчи ка 2 Холла Ь тоже не изменится. JToэтсму постоянная составляюк1а;я выход ного сигнала датчика 2 Холла, посту пающая после преобразования преобра зователем 5 напряжение-код через вт рой блок 2И-ИЛИ 13 на второй вход д лительного блока 10, определяется выражением Nfe--5.K-Inejion 2 Результат деления N на fjg поступает с выхода делительного блока 10 на запоминание в регистр 14. ,onK.Ka р i N5 5ц1ц В четвертый измерительный такт код NJ делительного блока 10 через второй блок 2И-ИЛИ 13 поступает на второй вход делительного блока 10. На первый вход делительного блока 10 через первый блок 2И-ИЛИ 12 поступает код N7 с регистра 14. По сигналу : с блока 8. в делительном блоке 10 осуществляется деление кода NI на код N . ц Ь Sm К 7 «2 Результат деления, пропорциональный измеряемой магнитной индукции переменных магнитных полей и не зависящий от наличия ферромагнитных масс вблизи датчика 2 Холла в момент измерения, считывается цифровым отсчетным блоком 9. Предлагаемое изобретение обладает более высокой точностью измерения. Это обусловлено тем, что изменение постоянной катушки/ создающей дополнительное магнитное поле, по которому производится калибровка устройства, автоматически корректируется независимо от того, на какую величину изменилась постоянная этой катушки. Применение данного измерителя позволяет полностью автоматизировать процесс измерения и значительно повысить производительность труда при измерениях в зазорах электрических машин и установок, корпусы которых выполнены из ферромагнитных материалов. ,

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения переменной магнитной индукции | 1979 |
|
SU983603A1 |
| Устройство для измерения переменнойМАгНиТНОй иНдуКции | 1979 |
|
SU813337A1 |
| Цифровой измеритель магнитной индукции | 1988 |
|
SU1644054A1 |
| Устройство для измерения переменной магнитной индукции | 1979 |
|
SU885941A2 |
| Цифровой измеритель магнитной индукции | 1989 |
|
SU1732305A1 |
| Способ определения индукции магнитного поля в зазоре магнитопровода | 1987 |
|
SU1688211A1 |
| Цифровой измеритель магнитной индукции | 1979 |
|
SU832504A1 |
| Устройство для измерения переменной магнитной индукции | 1977 |
|
SU741207A1 |
| Цифровой измеритель переменнойМАгНиТНОй иНдуКции | 1979 |
|
SU811161A1 |
| Цифровой измеритель постоянной магнитной индукции | 1989 |
|
SU1704114A1 |
ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ПЕРЕМЕННОЙ МАГНИТНОЙ ИНДУКЦИИ, содержавший последовательно соединенные генератор постоянного тока, датчик Холла, форгдарователь переменной составляющей, автоматический переключатель, и преобразователь напря.жение-код, катушку, подключенную к стабилизатору постоянного тока, последовательно соединенные блок управления и цифровой отсчетный блок, вход которого соединен с выходом блока управления, а выход - с вторым входом цифрового отсчетного блока, формирователь постоянной состаЪляющей, первый вход которого соединен с первым входом формирователя переменной составляющей, второй вход с вторыми входами формирователя переменной составляющей, преобразов5теля напряж(ение-код и автоматического переключателя, а также с выходом блока управления, а выход - с третьим входом автоматического переключателя, отличающийся тем, что, с целью повышения точности измерения, в него дополнительно введены первый, и второй блоки 2И-ИЛИ и регистр,при этом первые входы блоков 2И-ИЛИ сое-i динен с выходом преобразователя напряжение-код, а выходы с соответствую ющими входами делительного блока, вы(Л ход которого связан с вторым входом второго блока 2И-ИЛИ и первым входом регистра, второй вход которого соединен с третьим входом второго блока 2И-ИЛИ и первым входом цифрового отсчетного блока, а выход - с вторым входом первого блока 2И-ИЛИ,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU339884A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
