вого блока, считывающий выход (N+1)го элемента памяти запоминающего блока двоичных слов данных соединен с третьим входом вычитающего блока, первым входом первого элемента И и вторым входом блока определения изменения полярности, выход которого соединен с управляющим входом третьего управляемого инвертора и с вторым входом первого элемента И,
выход которого подключен к первому входу второго элемента И, к второму входу которого подключен второй выход блока автоматической настройки, выход второго элемента И соединен с первым входом сумматора, а выход цифрового порогового блока подключен к управляющему входу управляемого решающего блока, где N - количество отсчетов входного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейно-нелинейное устройство коррекции межсимвольной интерференции при приеме коррелированного сигнала | 1983 |
|
SU1125750A1 |
| Нелинейно-нелинейный корректор коррелированного сигнала | 1984 |
|
SU1225017A1 |
| Адаптивный корректор межсимвольной интерференции | 1987 |
|
SU1540009A1 |
| Устройство коррекции межсимвольных искажений сигнала | 1982 |
|
SU1190529A1 |
| Линейное устройство коррекции межсимвольной интерференции | 1984 |
|
SU1256213A1 |
| Устройство для адаптивной коррекции межсимвольной интерференции | 1980 |
|
SU987825A1 |
| Корректор | 1982 |
|
SU1166315A1 |
| Устройство для оценки параметров многолучевого канала связи | 1981 |
|
SU1092736A2 |
| Корректор | 1981 |
|
SU1137583A1 |
| Линейное устройство коррекции межсимвольной интерференции | 1984 |
|
SU1210225A1 |
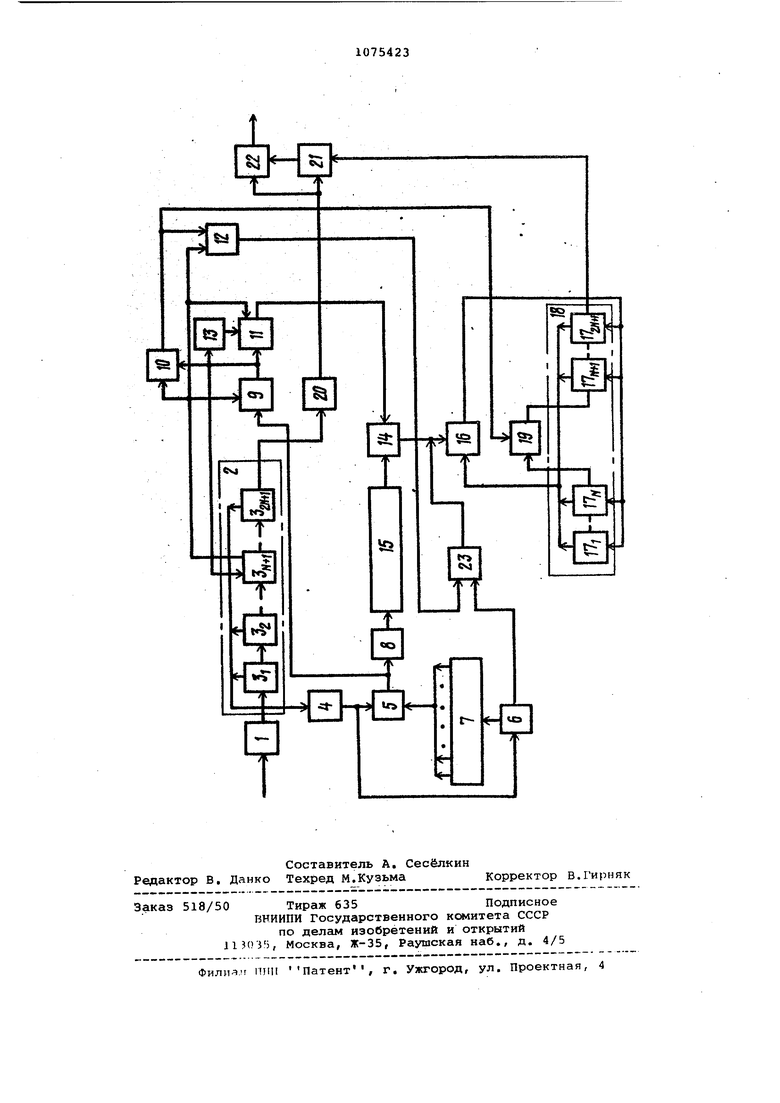
ЦИФРОВОЙ НЕЛИНЕЙНЫЙ КОРРЕКТОР СИГНАЛА, содержащий входной аналого-цифровой преобразователь, выход которого соединен с сигнальным входом запоминаквдего блока двоичных слов данных, состоящего из 2N+1 последовательно соединенных элементов памяти, считывающие входы которых за исключением (N+l)-ro элемента памяти объединены и подключены к входу первого блока определения знака, выход которого подключен к управляющему входу первого управляемого инвертора и к входу блока автоматической настройки, выход которого соединен с входом запоминающего блока весов отводов, считываклдие выходы которых объединены и соединены с информационным входом первого управляемого инвертора, выход которого подключен к первому входу сумматоранакопителя, к второму входу которого подключен считывающий выход (N-H)-ro элемента памяти запоминакицего блока двоичных слов данных, причем выход cyммaтoiэa-нaкoпитeля соединен с записывающим входом (N-fl)-ro элемента памяти запоминающего блока двоичных слов данных и с входом решающего блока, отличающийся тем, что, с целью повышения точности коррекции при больших уровнях межсимвольной интерференции, в него введены второй и третий управляемые инверторы, второй блок определения знака, вычитающий блок, блок определения изменения полярности, сдвигающий регистр знака, сумматор, запоминающий блок сигналов достоверности, дополнительный элемент памяти, цифровой пороговый блок, управляемый решающий блоки два элемента И, при этомвыход первого управляемого инвертора соединен с вторым блоком определения знака, выход которого через сдвигающий регистр знака подкл1|чен к управляющему входу второго управляемого инвертора,выход сумматора-накопителя соединен с первыми входами блока определения изменения полярности и вычитающего блока, к (Л второму входу вычитающего блока подключен выход решающего блока, (вычитающего блока соединен с информационным входом второго управляемого инвертора, выход которого соеди нен с первым входом сумматора, считывающие выходы 2N+1 элементов памяти, из которых состоит запоминаю ел щий блок сигналов достоверности, объединены и подключены к второму , входу сумматора, выход которого сое t динен с записывающими. входами 21Ч+1 элементов памяти запоминающего блока ND сигналов достоверности, переписываюОО щий выход N-ro элемента памяти которого соединен с входом (N+l)-ro элемента памяти через третий управляемый инвертор, переписывающий выход ()-ro элемента памяти, запоминающего блока сигналов достовер- . ности подключен к первому входу цифрового порогового блока, переписывающий выход 
Изобретение относится к электросвязи и может использоваться в устройствах преобразования сигналов (м демах) , обеспечивающих передачу цифровой информации. Известен адаптивный линейный гар монический корректор, содержащий аналого-цифровой преобразователь входного сигнала, выход которого со динен через запоминающий блок двоич ных слов данных с первым входом умн жителя, при этом второй вход умножи теля соединен с выходом запоминающе го блока весов отводов, выход умножителя подключен к входу накапливающего сумматора, выход которого соединен с входом решающего блока и с входом блока автоматической нас ройки, выход блока автоматической настройки подключен к входу запоминающего блока весов отводов tl Недостаток известного корректора невысокая точность коррекции, так как при передаче .--«данных по каналам с большими амплитудно-фазовыми искаж ниями помехи от межсимвольной интерференции бывают настолько велики, что возникают значительные смещения уровня принимаемого сигнала, часто превосходящие выбранный порог разграничения передаваемых сигналов, что в конечном итоге приводит к значитальным уровням остаточных межсимвольных помех на выходе корректора. Наиболее близким по технической сущности к изобретению является цифровой нелинейный корректор сигнала передачи данных, содержащий входной аналого-цифровой преобразователь, выход которого соединен с сигнальным входом запоминающего блока двоичных слов данных, состоящего из 2N+1 последовательно соединенных элементо памяти, считывающие выходы которых за исключением (N-fl)-ro элемента памяти объединены и подключены к входу блока определения знака, выход которого соединен с управляющим вхо дом управляемого инвертора и с входом блока автоматической настройки, выход которого соединен с входом запоминающего блока весов отводов, считывающие выходы которого объединены и подключены к информационному, входу управляемого инвертора, выход которого подключен к первсэму, входу. сумматора-накопителя, к второму входу которого подключен считывгиощий ; вход (N+l)-ro элемента памяти запоминающего блока двоичных слов данных, причем выход сумматора-накопителя соединен с записывающим входом CN+1)го элемента памяти запоминающего блока двоичных слов данных и с входог| решающего блока 2. Основной недостаток такого корректора заключается в эффекте jiaaмножения ошибок, т.е. если в результате действия межсимвольной интерференции и аддитивного шума произош-; ло изменение полярности символа, дан-i ных, .то этот символ, двигаясь по запоминающему устройству двоичных слов данных, ухудшает откорректированный сигнал на каждом такте коррекции. Этот эффект приводит к недостаточной точности коррекции при больших уровнях межсимвольной интерференции. Цель изобретения - повышение точности коррекции при больших уровнях межсимвольной интерференции. Цель достигается тем, что в цифровой нелинейный корректор сигнала, содержащий входной аналого-цифровой преобразователь, выход котброго соединен с сигнальным входом запоминакяцего блока двоичных слов данных, состоящего из 2N+1 последовательно . сфединенных элементов памяти, считывающие выходы которых за исключением {N+l)-ro элемента памяти объединены и подключены к входу первого блока определения знака, выход которого пoдкJ ючeн к управляющему входу первого управляемого инвертора и к входу блока автоматической настройки, выход которого соединен с входом запоминающего блока весов отводов, считывающие выходы которого объединены и соединены с информацион ным входом первого управляемого инвертора, выход которого подключен к первому входу сумматора-накопителя, к второму входу которого подключен считывающий выход (N+l)-ro элемента памяти запоминающего блока двоичных слов данных, причем выход сумматоранакопителя соединен с записывающим входом (N+1)-го элемента памяти запоминающего блока двоичных слов данных и с входом решающего блока, вне дены второй и третий управляемые инверторы, второй блок определения знака, вычитающий блок, блок определения изменения полярности, сдвигающий регистр знака, сумматор, запоминающий блок сигналов достоверности дополнительный элемент памяти, цифровой пороговый блок, управляемый решающий блок и два элемента И, при этом выход первого управляемого инвертора соединен с вторым блоком определения знака, выход которого через сдвигающий регистр знака подключен к управляющему входу второго управляемого инвертора, выход -сумматора-накопителя соединен с первыми входами блока определения изменения полярности и вычитающего блока, к второму входу вычитающего блока подключен выход решающего блока, выход вычитающего блока соединен с информационным входом второго управляемого инвертора, выход которого соединен с первым входом сумматора, считывающие выходы 2N+1 элементов памяти, из которых состоит запоминающий блок сигналов достоверности, объединены и подключены к второму входу сумматора, выход которого соединен с записывающими входами 2N+1 элементов памяти запоминающего блока сигналов достоверности, переписывающий выход N-ro элемента памяти которого соединен с входом (N+l)-ro элемента памяти через третий управляемый инвертор, переписывающий выход (2N+1)го элемента памяти запоминающего бло ка сигналов досто5верности подключен к первому входу цифрового порогового блока, переписывающий выход {2N+1)го элемента памяти запоминающего блока двоичных слов данных через дополнительный элемент памяти соединен с сигнальным входом управляемого ретающего блока и с вторым входом цифрового порогового блока, считываю-;щий выход (N+l)-ro элемента памяти эстоминающего блока двоичных слов данных соединен с третьим входом вычитающего блока, с первым входом пер вого эло «ента И вторым входом блока определения изменения полярности, выход которого соединен с управляющим входом третьего управляемого инвертора и с вторым входом первого элемента И, выход которого подключен к первому входу второго элемента И, к второму входу которого подключен второй выход блока автоматической настройки, выход второго элемента И соединен с первым входом сумматора, а выход цифрового порогового блока подключен к управляющему входу управляемого решающего блока, где N - количество отсчетов входного сигнала. На чертеже представлена структурная электрическая схема цифрового нелинейного корректора сигнала. Цифровой нелинейный корректор сигнала содержит входАой аналогоцифровой преобразователь (АЦП) 1, запоминающий блок (ЗБ) 2 двоичных слов данных, состоящий из последовательно соединенных элементов 3 памяти, первый блок 4 определения знака, первый управляемый инвертор 5, блок 6 автоматической настройки, ЗБ 7 весов отводов, второй блок 8 определения знака, сумматор-накопитель 9, блок 10 определения изменения полярности, вычитающий блок 11, первый элемент И 12, решающий блок 13, второй управляемый инвертор 14, сдвигающий регистр 15 знака, сумматор 16, элементы 17 памяти, входящие в состав ЗБ 18 сигналов достоверности, третий управляемый инвертор 19, дополнительный элемент 20 памяти, цифровой пороговый блок 21, управляемый решающий блок 22 и второй элемент И 23. Предложенный цифровой нелинейный корректор сигнала работает следующим образом. С выхода АЦП 1 поступают отсчеты входного сигнала, являющегося суперпозицией полезного сигнала, суммы интерференционных помех и аддитивного, шума N . де С к последовательность сигналов данных, принятых из канала связи; N1 последовательность символов, выработанных источником информации; отсчеты реакции на единичный элемент, и записываются в ЗБ 2 двоичных слов данных. Блок б автоматической настройки определяет отсчеты Ь , Ь.,... ...).,Ц,...) гребенчатой реакции на единичный элемент и записывает их В ЗБ 7 весов отводов. Работу предложенного корректора удобно разделить на две части. Процесс первоначальной коррекции заключается в нелинейной компенсации интерференционных помех. Рассмотрим е на примере одного символа, В резуль тате межсимвольной интерференции в канале связи, отстающий на К тактоь символ А изменяет слмволу Ад на ве личину + . Знак изменения определяется знаком А символа (если S(v.n А -1, то -Вц, если Ац 1, то +В) , т.е. + А -Ъ,. , поI скольку аддитивный шум - случайная величина с математическим ожиданием равным нулю, и корректор не изменяе его влияние на достоверность приня тых отсчетов, В дальнейшем будем считать, что шум в канале отсутствует, В корректоре происходит следующе определяется знак отсчёта а,, котор соответствует символу А|, Предполагая, что в канале связи не произошла ошибка ( а | соответствует А) в корректоре на основании знака отсчета происходит операция, обратная той, которая имела место в канале связи, т,е, происходит изменение корректируемого отсчета на величину + Ъ). Знак изменения определяется знаком отсчета а i (если , то -В, если , то ) , Та ким образом, если А | совпадает с к г происходит полная компенсация интерференционной помехи от дан ного символа .(М„ , где а откорректированный отсчет Процесс первоначальной коррекции выполняет часть схемы, в которую входят; ЗБ 2 двоичных слов данных, ЗБ 7 весов отводов, первый блок 4 определения знака, первый управляемый инвертор 5, сумматор-накопитель 9, решающий блок 13, С импульсом тактовой частоты f происходит сдвиг информационной последовательности в ЗБ 2, а также запись очередного отсчета из АЦП 1. Последовательная обработка ведется с частотой (2N +2)f. С каждым импульсом частоты отсчеты, хранящиеся в ЗБ 2 двоичных слов данных, последовательно подаются на блок 4 определения знака. Аналогично, реса отводов из ЗБ 7 весов отводов поступают на информационный вход управляемого инвертора 5 Управляемый инвертор 5 изменяет знак веса отвода, если отсчет, поступающий в блок 4 определения знака, больше нуля, и не изменяет знак веса отвода, если этот отсчет меньше нуля. Таким образом, с выхода:управляемого инвертора 5 на сумматор-накопитель 9 поступают ко | пенсирующие составляющие -Ь S п o( к|р . На (N+1)-M такте частоты корректируемый отсчет с элементл памяти 3 . непосредственно подается на сумматор-накопитель 9. В конце тактового цикла в сумматоре-накопителе накапливается величина К ок-о 177-. fe-icS2: «, --l , В случае, если последовательность знаков принятых отсчетов совпадает с последовательностью переданных сим-, волов, происходит полная компенсация межсимвольной интерференции. Действительно; N . t.no, V-K K--H . N Ь. В конце такта последним импульсом частоты f см откорректированный сигнал а переписывается в элемент 3| памяти ЗБ 2, Этим обеспечивается то, что в процессе коррекции участвуют N опережающих откорректирЪванных, т,е. боЛее достоверных отсчетов. При значительных искажениях,обуславливаемых характеристиками канала связи, возрастает вероятность ошибки. Поэтому нарушается соответствие между последовательностями {stj-n а и {А, j и первоначальный этап корреуции не обеспечивает требуемой достоверности. Для повышения помехоустойчийости при больших искажениях вводится второй этап коррекции. Рассмотрим его . на примере одного отсчета. Допустим, из канала связи принимается искажеиный отсчет, т.е. , и первый этап коррекции не выявляет его ошибочность ( а ,,с-) г поэтому искаженньгй отсчет, участвуя на каждом такте частоты f в первом этапе коррекции, не приводит к нулю интерференционную помеху от символа, на месте которого он на данном такте находится, а увеличивает ее вдвое. Действительно, если , то о -Ь-к- -к s Величина помехи откорректированного сигнала равна 0 ОГ 0 2 , где ер - помеха откорректированного сигнала. . Это значит, что помеха откорректированного отсчета на каждом такте совпадает по знаку с кслшенсирующеЯ ооставлякяцей от искаженного отсчета, eo (.K)sg-n(). Это Обстоятельство используется для повышения достоверности принятого сигнала; Для каждого отсчета по мере прохождения его по ЗБ 2 двоичных слов данных накапливают по меху следующим образом: если его ксмпенсирукшая составляющая положительна - складывают помеху если отрицательна - вычитают. В этом слу чае при условии, что отсчет искажен накапливается величина, равная |i 2.}Ъц|, так как компенсирующая сскГтавлякицая совпадает по знару с помехой. В случае неискаженного отсчета процесс первоначальной коррек ции полностью снимает интерференцию от данного отсчета. Следовательно, не существует связи между компенсирукздей составляющей и помехой, а накопленная помеха - случайная величина с математическим ожиданием, равным нул1а.Накопленное значение помехи в метлент выхода отсчета из ЭБ 2 двоич ных слов данных является дополнительным признаком его достоверности Если по откорректированному значению а, нельзя сделать решение о полярности отсчета (.врц) меньше определенного порога С), то решение принимается по накопленной помехе: если накопленная помеха больше поро га Д, то ар, где - р шение по откорректированному отсчету, если нако12ленная помеха меньше порога Д, то Пороговые величины С и Д определяются цсходнымн фазо-частотньвии и амплитудночастотными искажениями, а также уро нем шума в канале. Пороговая величи на С, определяющая область сигнала/ в которой решение о знаке посз:шки нельзя принять по знаку отсчета и оно принимается по величине накопленной помехи, выбирается анализатором качества канала или предварительным фазовым корректором. Уровен порога Д определяется блоком 6 автЬ матической нас.тройки и должен быть N меньше,, чем --i Jg (. К-N Если в процессе первого этапа коррекции откорректированный отсчет изменяет полярность , то накопленную к этому моменту нрмй ху необхсдцимо инвертировать и увели чить на величину 2 /Vl. . действи K.--f тельно, если первый этап коррекции исправил ошибку, то накопленная к моменту помеха с математическ ожидай нем (f tпреобразуется в KS-N случайную ведТичину с математическим ожиданием, равным нулю, что соответствует неискаженному отсчету, а если первый этап коррекции исказил полярность отсчета, то накопленная помеха с математическим ожиданием, равным нулю, преобразуется в случайную величину с математическим ожида1 -1 Нием (к) соответствует искаженному отсчету. По описанномх алгоритму работает часть схемы, включающая: дополнительный элемент 20 памяти, вычитающий .блок 11, второй блок 8 определения-, знака, сдвигающий регистр 15 знака,второй и третий управляемые инверторы 14 и 19, сумматор 16, ЗБ 18 сигналов достоверности, цифровой пороговый блок 21, управляемый решающий блок 22, блок 10 определения изменения полярности, первый и второй элементы И 12 и 23. С последним импульсом частоты в конце каждого такта сигнал с выхода сумматора- накопителя 9 подается на .-блок 10 определения изменения полярности и на вычитающий блок 11. В случае, если имелось изменение полярности ( а о ) , то на выходе блока 10 появляется высокий уровень, который действует в течение всего последующего такта, также как и двоичное число, соответствующее сигналу ошибки е„ на выходе вычитающего блока 11. КЬмпенсирующие составляющие с управляемого инвертора 5 подаются на блок 8 определения знака, с выхода которого с частотой f знаки компенсирующих составляющих записываются в сдвигающий регистр 15 знака. Таким образом, в конце каждого такта в сдвигающем регистре 15 знака последовательно записаны знаки компенсирующих составляющих, участвовавших в процессе коррекции на предыдущем такте. Управляемый инвертор 14 изменяет знак помехи е, если на его управляющий вход подается сигнал, соответствуквдий отрицательному знаку компенсирующей составляющей, .транслирует помеху BQ, если на его управляющий вход подается сигнал, соответствующий положительному знаку компенсирующей составляющей, т.е. осуществляет умножение помехи ер на знак компенсирующей составляющей. Кроме помехи, умноженной на знак компенсирующей составляющей, на сумматор 16 с каждым импульсом частоты подается помеха, накопленная на предыдущих тактах и хранящаяся в ЗБ 18 сигналов достоверности, свидетельствующая о достоверности именно того отсчета, знак компенсирующей составляющей которого подается с этим импульсом на управляемгзтй инвертОр 14. Результат суммирования записывается по этому же адресу в БЗ 18 сигналов достоверности, С импульсом тактовой частоты f на цифровой пороговый блок 21 подается число из последнего элемента памяти ЗБ 18 сигналов достоверности посредством сдвига всего его содержимого, а также соответствующий ему отсчет из элемента 20 памяти. В этот же момент времени сдвигается содержимое ЗБ 2 двоичных слов данных и содержимое его последнего элемента 32N-f-i памяти записывается в элемент 20 памяти. С выхода цифрового порогового блока 21 снимается сигнал недостоверности знака отсчета в случае совпадения двук условий: отсч.ет, хранившийся в элементе 20 памяти, по абсолютной величине меньше порога С, помеха, накопленная в последнем элементе памяти ЗБ 18 сигналов достоверности больше порога Д. Управляемый решающий блок 22 работает аналогично решающему блоку 13, но при появлении сигнала недостоверноети на управляющем входе изменяет полярность решения.
Если после первого этапа коррекции знак откорректированного отсчета изменился ( , то в процессе сдвига содержимого ЗБ 18 сигналов достоверности число, хранившееся в элементе 17., памяти и соответствукщее отсчету , проходя через управляемый инвертор 19, изменяет свою полярность за счет управляющего сигнала, выработанного блоком 10 определения изменения полярности. С {N+1)-M импульсом частоты f(,ij следую-дего такта сигнал с выхода элемента ЗfJ. памяти ЗБ 2 заблокирует передачу помехи на вход сумматора 16 и в то же время через открытый первы элемент И 12 поступит на первый вход второго элемента И 23. Этот сигнал
разрешает подачу на сумматор 16 чис
ла, равного у /Ъ ( блока 6
M-N . автоматической настройки. Таким образом, к проинвертиро.ванному ранее
-1
числу прибавляется |Ь :, что -.
соответствует описанному ранее алгоритму работы.
Поскольку в указанном корректоре информация о знаке принятого символа извлекается не только из знака откорректированного отсчета, но также и из хвостов реакции на единичный элемент, то достоверность принятия решения повышается, что подтверждается результатами моделирования ,на ЭВМ.
По сравнению с базовым объектом предлагаемое устройство способно обеспечить в 2 - 10 раз меньшую вероятность ошибки восстановленного сигнала при больших уровнях,межсимвольной интерференции (Е критерий Об). Различия в количественном выигрыше по вероятности ошибки определяются видом реакции на единичный элемент и уровнем шума. Функциональная зависимость, связывающая эти параметры, пока не установлена. Кроме того, в связи с тем, что в алгоритм работы базового объекта входит операция умножения, требующая больших аппаратурных затрат и являющаяся наиболее длительной при программной реализации, перевод линейного корректора видеосигнала на универсальные микропроцессоры и микроЭВМ является сложной технической задачей. Подобный недостаток отсутствует у предлагаемого устройства.
Таким образом, предлагаемое устройство обеспечивает более высокую точность коррекции/ что позволяет использовать устройство преобразования сигналов на каналах связи с худшими частотными характеристиками и большим числом переприемных участков. Кроме того, реализация предлагаемого устройства на микроэвм и микропроцессорах значительно проще, что приводит к увеличению надежности функционирования.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| НЕЛИНЕЙНЫЙ АВТОМАТИЧЕСКИЙ КОРРЕКТОР СИГНАЛА ПЕРЕДАЧИ ДАННЫХ | 1972 |
|
SU421137A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
