СП
со со
СП
2. Способ управления замкнутой системой охлаждения,оборудованной компрессором с поворотным направляющим аппаратом, конденсатором, испарителем путем воздействия на изменение положения направляющего аппарата и частоты, вращения приводного электродвигателя по скорости его вращения, отличающийс.я тем, что, с целью повышения точности регулирования компрессора, измеряют разность между температурами конденсирующегося и испаряющегося хладагентов, положение поворотного направляющего аппарата компрессора, суммируют все указанные сигналы с сигналами соответствующих значений измеряемых параметров и формируют
сигналы, воздействующие на положение поворотного направляющего аппарата и частоту вращения приводного электродвигателя.
3. СЛособ по п.2, отличающийся тем, что при уменьшении производительности системы охлаждения производят ступенчатое умен шение частоты вращения приводного электродвигателя на шесть заданных уровней, при этом закрытие направляющих аппаратов производят при переходе частоты вращения с третьего до пятого и завершают в момент перехода с пятого уровня на шестой, а при увеличении производительности указанные операции производят в обратной последовательности.

| название | год | авторы | номер документа |
|---|---|---|---|
| Приводной механизм запорного устройства | 1978 |
|
SU1033014A3 |
| Аксиально-поршневой компрессор | 1974 |
|
SU586850A3 |
| СИСТЕМА ОХЛАЖДЕНИЯ | 2012 |
|
RU2614417C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ ОХЛАЖДЕНИЯ (ВАРИАНТЫ), СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЦЕНТРОБЕЖНЫМ КОМПРЕССОРОМ | 1993 |
|
RU2107234C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПАРАЛЛЕЛЬНЫМИ БЛОКАМИ КОНДЕНСАЦИИ | 2006 |
|
RU2411425C2 |
| СПОСОБ И СИСТЕМА ОХЛАЖДЕНИЯ БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2727220C2 |
| СХЕМА ПРОИЗВОДИТЕЛЬНОСТИ ЗАМКНУТОГО ЦИКЛА И УПРАВЛЕНИЯ ПИТАНИЕМ МНОГОСТУПЕНЧАТОЙ ТРАНСПОРТНОЙ ХОЛОДИЛЬНОЙ УСТАНОВКИ | 2013 |
|
RU2637147C2 |
| ХОЛОДИЛЬНАЯ СИСТЕМА | 1990 |
|
RU2096697C1 |
| МНОГОКАМЕРНАЯ ТРАНСПОРТНАЯ ХОЛОДИЛЬНАЯ СИСТЕМА С ЭКОНОМАЙЗЕРОМ | 2016 |
|
RU2721508C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВЛАЖНОГО ХОДА КОМПРЕССОРА ХОЛОДИЛЬНОЙ МАШИНЫ | 2007 |
|
RU2362948C2 |
1. Устройство для управления замкнутой системой охлаждения, оборудованной компрессором с поворотным направляющим аппаратом, конденсатором, испарителем, причем контур управления компрессором содержит исполнительный механизм привода направляющего аппарата, приводной -электродвигатель с преобразователем электрического тока, датчик частоты вращения и логический блок, отличающееся тем, что, с целью повышения точности регулирования компрессора, оно содержит датчики температуры конденсирующегося и испаряющегося хладагентов, датчик положения : --направляющего аппарата, датчик температуры охлаждающей, испаритель воды, управляющий блок, входы которого соединены с указанными датчиками, а выходы - с исполнительными механизмами поворотного направляющего аппарата, двумя входами логического блокаи преобразователем электрического тока, причем управляющий блок содерсл жит синхронизирующий генератор, усилитель сигналов датчиков, формировас тели сигналовдатчиков и промежуточных сигналов, синхронизирующий модулятор и сумматоры, соединенные последовательно между собой.
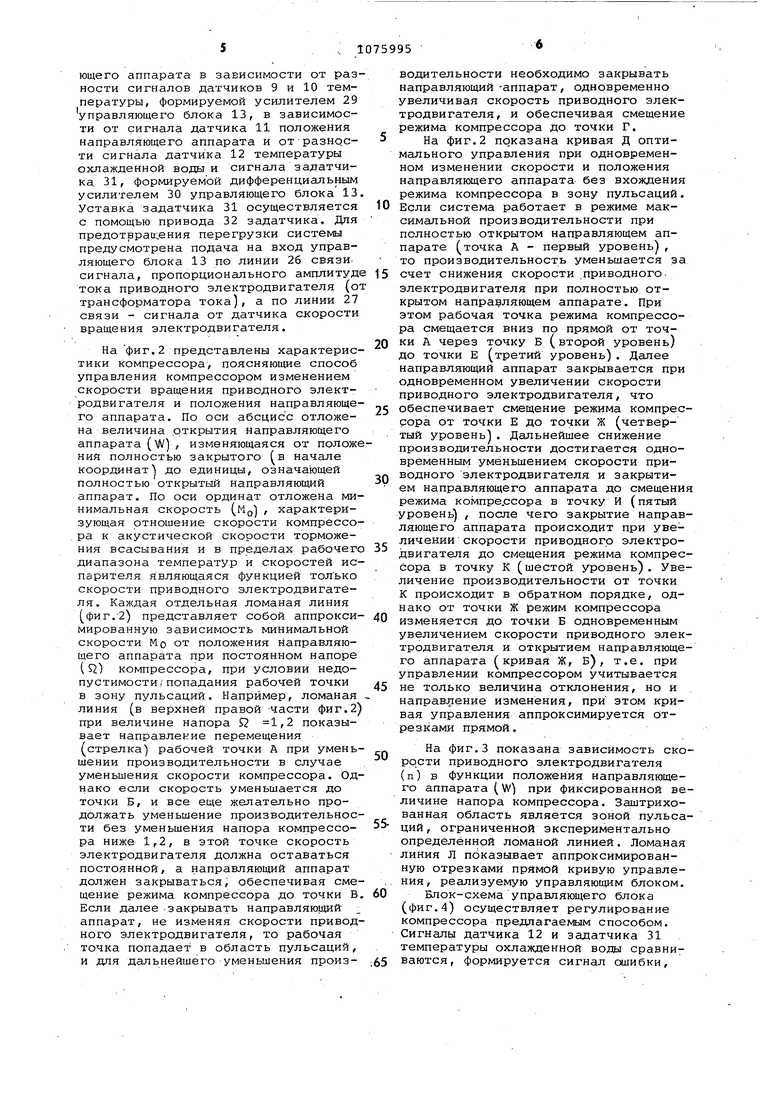
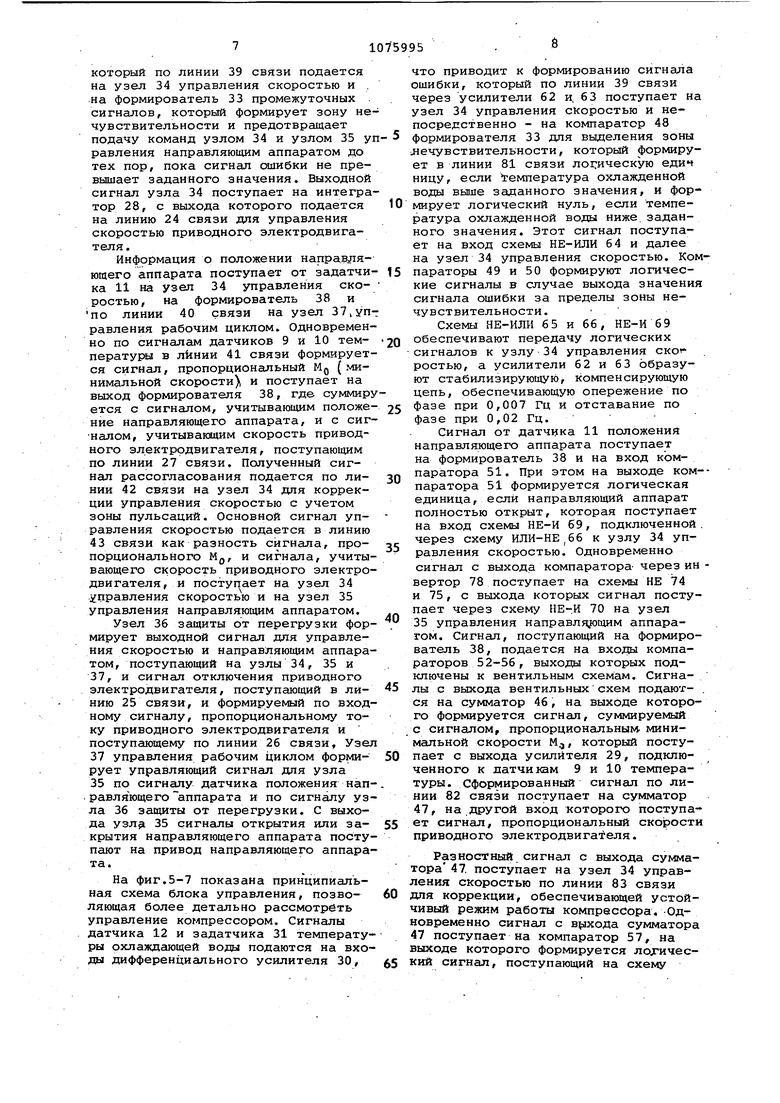
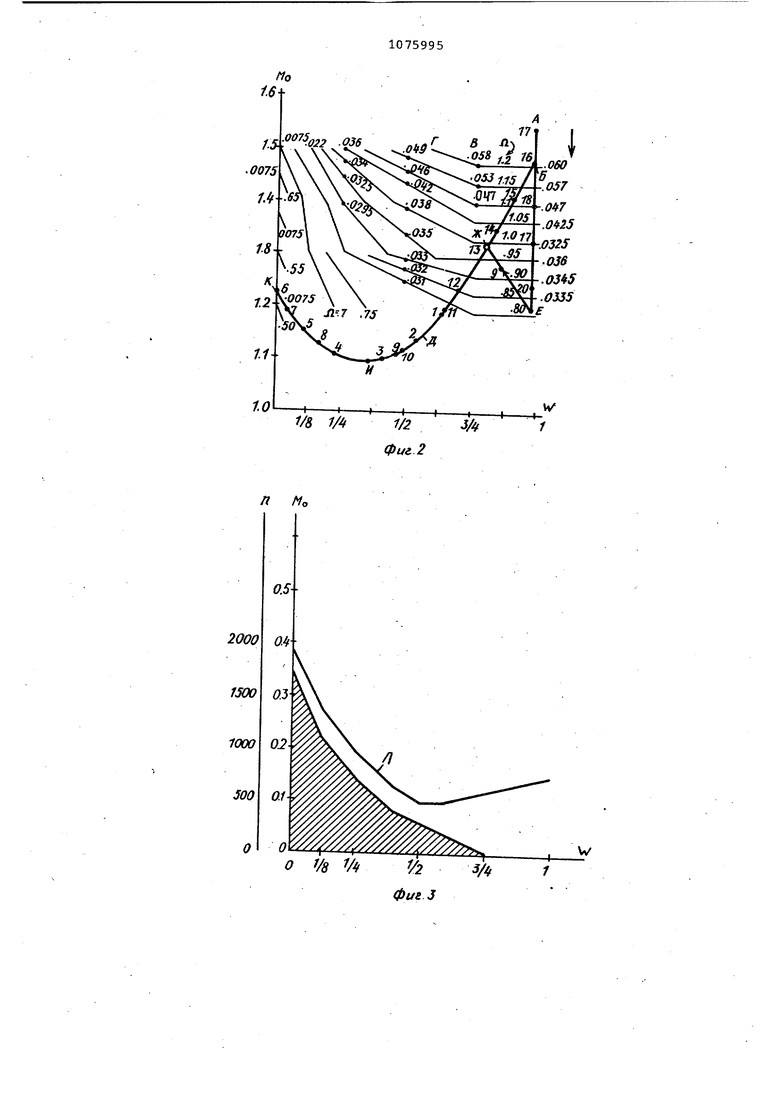
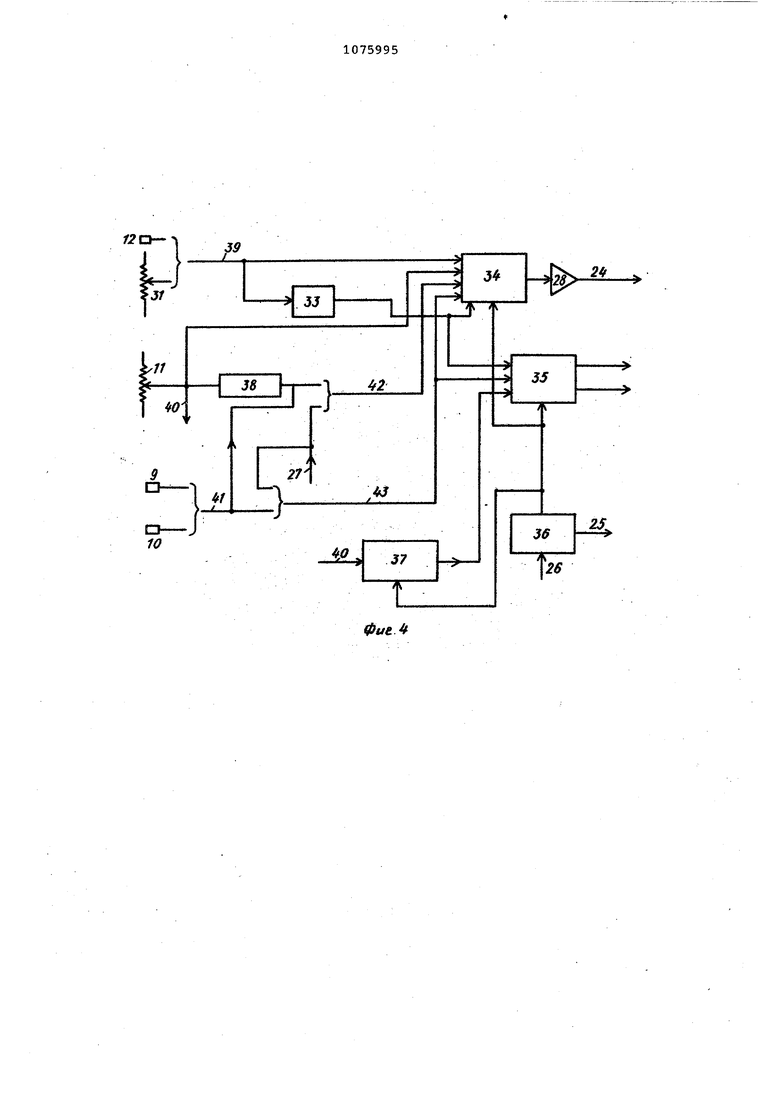
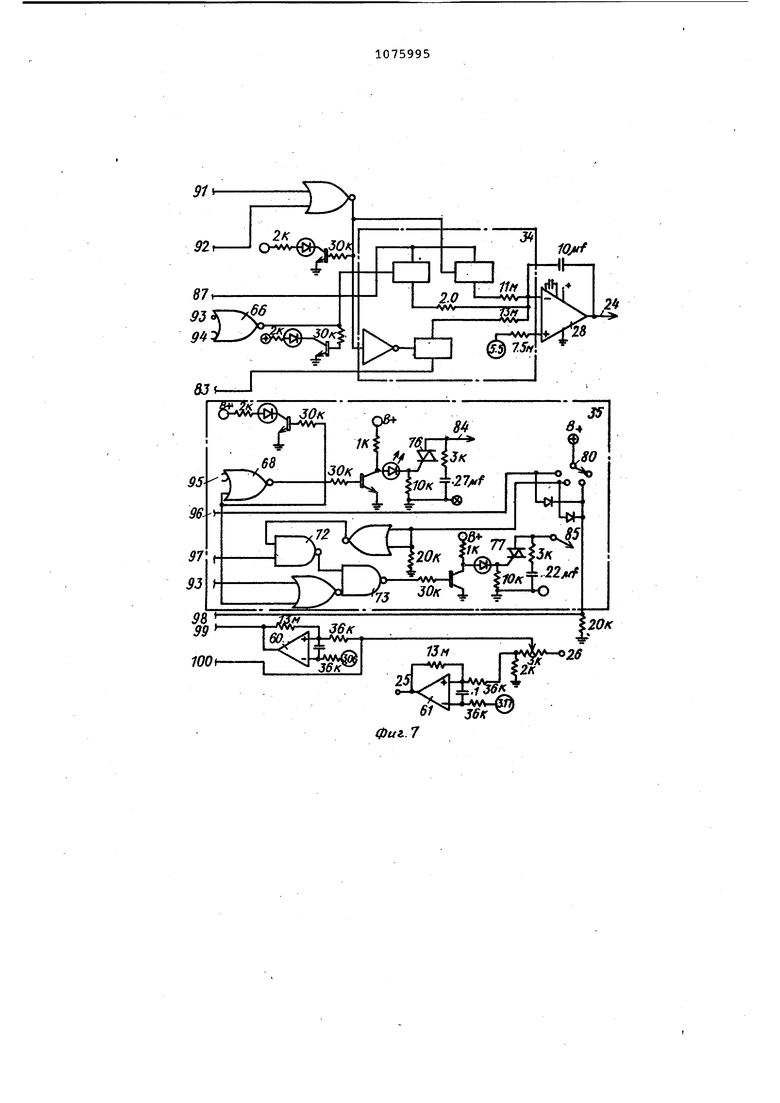
Изобретение относится к энергети ке и, в частности к автоматическому управлению системами охлазвдения. Известно устройство для управления замкнутой системой охлаждения, оборудованной компрессором с поворо ным направляющим аппаратом, конденсатором, испарителем, причем контур управления комперссором содержит ис полнительный механизм привода направляющего аппарата, приводной электродвигатель с преобразователем электрического тока, датчик частоты вращения и логический блок. Данное устройство реализует способ управле ния замкнутой системой охлаждения, оборудованной компрессором с поворотным направляющим аппаратом, конденсатором, испарителем путем воздействия на изменение положения.-направляющего аппарата и частоты вращения приводного электродвигателя по скорости его вращения l . Однако известные устройство и способ не обеспечивают требуемой точности управления. Целью изобретения является повышение точности регулирования компрессора. Поставленная цель достигается тем, что устройство для управления замкнутой системой охлаждения, оборудованной компрессором с поворотным направляющим аппаратом, кондейсатором, испарителем, причем контур управления компрессором содержит исполнительный механизм привода ,направляющего -аппарата, приводной эле1 тродвигатель с преобразователем элек трического тока, датчик частоты вращения и логический блок, дополнительно содержит датчики температуры конденсирующегося и испаряющегося хладагентов, датчик положения направлякядего аппарата, датчик температуры охлаждающей испаритель воды, управляющий блок, входы которого соединены с указанными датчиками, а выходы - с исполнительными механизмами поворотного направляющего аппарата, двумя входами логического блока и преобразователем электрического тока, причем управляющий блок содержит синхронизирующий генератор, усилитель сигналов датчиков, формирователи сигналов датчиков и промежуточных сигналов, синхронизирующий модулятор и сумматоры, соединенные последовательно между собой. Поставленная цель достигается тем, что согласно способу управления замкнутой системой охлаждения, оборудованной компрессором с поворотным направляющим аппаратом, конденсатором, испарителем путем воздействия на изменение положения направля-. ющего аппарата и частоты вращения приводного электродвигателя по скорости его вращения, измеряют разность между температурами конденсирующегося и испаряющегося хладагентов, положение поворотного направляющего аппарата Компрессора, суммируют все указанные сигналы с сигналами соответствующих значений измеряемых параметров и формируют сигналы, воздействующие на положение поворотного направляющего аппарата и частоту вращения приводного электродвигателя. Кроме того при уменьшении производительности системы охлаждения производят ступенчатое уменьшение частоты вращения приводного электродвигателя на шесть заданных уровней,при этом закрытие направляющих аппаратов производят при переходе частоты вращения с третьего до пятого и завершают в момент перехода с пятого уров ня на шестой, а при увеличении производительности указанные операции производят в обратной последовательности , На фиг.1 показана блок-схема устройства, реализующего предлагаемый способ; на фиг.2 - характеристики крмпрессора, на фиг.З - то же, при фиксированной величине напора компрессора; на фиг.4 - блок-схема управляющего блока/ на фиг.5-7 - принципиальная схема управляющего блока; на фиг.8 А-Е - временные диаграммы работы управляющего блока Устройство для управления замкнутой системой охлаждения, оборудованной компрессором 1 с поворотным направляющим аппаратом 2, конденсатором 3, испарителем 4, содержит исполнительный механизм 5 привода направляющего аппарата, приводной электродвигатель 6 с преобразователем 7 электрического тока, датчик частоты вращения (не показан) и логический блок 8, а также датчик 9 температуры конденсирующегося хладагента, датчик 10 температуры испаряющегося хладагента, датчик 11 положения направляющего . аппарата, датчик 12 температуры охлажденной воды и управляющий блок 13. Кроме того устрой ство содержит магистрали 14-16 хладагента, дроссель 17, магистрали 18 и 19 охлаждающей воды, магистрали 2021, подключенные к охлаждаемому объекту, регулируемый источник 22 посто янного тока, линии 23-27 связи, интегратор 28. усилитель 29 сигналов датчиков, дифференциальный усилитель 30, задатчик 31 и привод 32 задатчи1ка температуры. Блок-схема блока управления содержит (. фиг..4 ) формирователь 33 промежуточных сигналов, узел 34 управления скоростью, узел 35 управления направляющим аппаратом, узел 36 защи ты от перегрузки, узел 37 управления рабочим циклом, формирователь 38 сигналов датчика и линии 39-43 связи. Блок управления (фиг.5) содержит синхронизирующий генератор 44, синхронизирующий модулятор 45 и сумматоры 46 и 47, соединенные последовательно между собой. Кроме того на схеме показаны компараторы 48-61, усилители 62 и 63, схемы НЕ-ИЛИ 64-68, схемы НЕ-И 69-73, схемы НЕ 74 и 75, тиристоры 76 и 77, инвертор 78, интегратоо 79, переключатель 80 и линии 81-100 связи. Способ, реализуемый предлагаемым устройством, осуществляется следующим Ьбразом. Хладагент, нагнетаемый компрессором 1, поступает по магистрали 14 в конденсатор 3, затем по магистрали 15 через дроссель 17 - в испаритель 4, откуда по магистрали 16 через направляющий аппарат 2 - в компрессор. В конденсаторе 3 хладагент предварительно охлаждается водой, поступа™ ющей из градирни по магистрали 18, и обратно в градирню - по К5агистрали 19. Охлаждаемый объект подключен к испарителю 4 магистралями 20 и 21, по которым циркулирует вода. Центробежный компрессор 1 приводится во вращение приводным электродвигателем 6 асинхронного типа, который питается от регулируемого источника 22 постоянного тока через преобразователь 7 электрического тока. Регулируемый источник 22 постоянного тока выполнен в виде фазоуправляемого выпрямителя, подключенного по линии 23 связи к. сети переменного тока. Сигнал регулирования поступает на регулируемый источник 22 от управляющего блока 13. При отсутствии необходимости регулирования напряжения преобразователь 7 может подключаться к любому другому источнику постоянного тока, например, к аккумулятору или выпрямителю. Регулирование скорости вращения приводного электродвигателя 6 осуществляется изменением частоты на выходе преобразователя 7 в соответствии с величиной постоянного управляющего напряжения, поступающего от управляющего блока 13 по линии 24 связи на логический блок 8, который изменяет частоту подачи коммутирующих импульсов на преобразователь 7, а также может прекращать подачу импульсов и тем самым останавливать приводной электродвигатель 6 по сигналу, поступающему от управляющего блока 13 по линии 25 связи. Логический блок 8 состоит из генератора, изменяющего частоту импульсов в соответствии с постоянным управляющим напряжением, и кольцевого счетчика, распределяющего импульсы управления тиристорами или другими коммутирующими элементами преобразователя 7. Постоянное напряжение для управления скоростью вращения приводного электродвигателя поступает с выхода интегратора 28 управляквдего блока 13. Кроме регулирования скорости вращения приводного электродвигателя, упраляю1ций блок 13 регулирует положение направляющего аппарата 2 подачей сигналов открытия или закрытия на привод 5 направляющего аппарата в зависимости от разности сигналов датчиков 9 и 10 температуры, формируемой усилителем 29 управляющего блока 13, в зависимости от сигнала датчика 11 положения направляющего аппарата и от-разности сигнала датчика 12 температуры охлажденной воды и сигнала задатчика, 31, формируемой дифференциальным усилителем 30 управляющего блока 13 Уставка задатчика 31 осуществляется с помощью привода 32 задатчика. Для предотврац;ения перегрузки системы предусмотрена подача на вход управляющего блока 13 по линии 26 связисигнала, пропорционального амплитуд тока приводного электродвигателя (о трансформатора тока), а по линии 27 связи - сигнала от датчика скорости вращения электродвигателя. На фиг.2 представлены характеристики компрессора, поясняющие способ управления компрессором изменением скорости вращения приводного электродвигателя и положения направляющего аппарата. По оси абсцисс отложена величина открытия направляющего аппарата (W), изменяющаяся от положе НИИ полностью закрытого в начале координат 1 до единицы, означающей полностью открытый направляющий аппарат. По оси ординат отложена минимальная скорость (MO), характеризующая отношение скорости компрессора к акустической скорости торможения всасывания и в пределах рабочего диапазона температур и скоростей испарителя являющаяся функцией только скорости приводного электродвигателя. Каждая отдельная ломаная линия (фиг.2) представляет собой аппроксимированную зависимость минимальной скорости MO от положения направляющего аппарата при постоянном напоре (} компрессора, при условии недопустимости (попадания рабочей точки в зону пульсаций. Например, ломаная линия (в верхней правой -части фиг.2) при величине напора S2 1,2 показывает направление перемещения (стрелка) рабочей точки А при уменьшении производительности в случае уменьшения скорости компрессора. Однако если скорость уменьшается до точки Б, и все еще желательно продолжать уменьшение производительности без уменьшения напора компрессора ниже 1,2, в этой точке скорость электродвигателя должна оставаться постоянной, а направляющий аппарат должен закрываться, обеспечивая смещение режима компрессора до точки В Если далее -закрывать направляющий аппарат, не изменяя скорости приводного электродвигателя, то рабочая точка попадает в область пульсаций, и для дальнейшего уменьшения производительности необходимо закрывать направляющий -аппарат, одновременно увеличивая скорость приводного электродвигателя, и обеспечивая смещение режима компрессора до точки Г. На фиг.2 показана кривая Д оптимального управления при одновременном изменении скорости и положения направляющего аппарата без вхождения режима компрессора в зону пульсаций. Если система работает в режиме максимальной производительности при полностью открытом направляющем аппарате (точка А - первый уровень) , то производительность уменьшается за счет снижения скорости приводногоэлектродвигателя при полностью открытом направляющем аппарате. При этом рабочая точка режима компрессора смещается вниз по прямой от точки А через точку Б (второй уровень) до точки Е (третий уровень). Далее направляющий аппарат закрывается при одновременном увеличении скорости приводного электродвигателя, что обеспечивает смещение режима компрессора от точки Е до точки Ж (четвертый уровень). Дальнейшее снижение производительности достигается одновременным уменьшением скорости приводного электродвигателя и закрытием направляющего аппарата до смещения режима компре.ссора в точку И (пятый уровень) , после чего закрытие направляющего аппарата происходит при увеличении скорости приводного электродвигателя до смещения режима компрессора в точку К (шестой уровень). Увеличение производительности от точки К происходит в обратном порядке, однако от точки Ж режим компрессора изменяется до точки Б одновременным увеличением скорости приводного электродвигателя и открытием направляющего аппарата (кривая Ж, Б), т.е. при управлении компрессором учитывается не только величина отклонения, но и направление изменения, при этом кривая управления аппроксимируется отрезками прямой. На фиг.З показана зависимость скоррсти приводного электродвигателя (п) в функции положения направляющего аппарата (W) при фиксированной величине напора компрессора. Заштрихованная область является зоной пульсаций, ограниченной экспериментально определённой ломаной линией. Ломаная линия Л показывает аппроксимированную отрезками прямой кривую управления, реализуемую управляющим блоком. Блок-схема управляющего блока (фиг.4) осуществляет регулирование компрессора предлагаемым способом. Сигналы датчика 12 и задатчика 31 температуры охлажденной воды сравниваются, формируется сигнал сшибки.
который по линии 39 связи подается на узел 34 управления скоростью и . на формирователь 33 промежуточных . сигналов, который формирует зону нечувствительности и предотвращает подачу команд узлом 34 и узлом 35 у равления направляющим аппаратом до тех пор, пока сигнал ошибки не превьошает заданного значения. Выходной сигнал узла 34 поступает на интегратор 28, с выхода которого подается на линию 24 связи для управления скоростью приводного электродвигателя.
Информация о положении направляющего аппарата поступает от задатчика 11 на узел 34 управления скоростью, на формирователь 38 и по линии 40 связи на узел 37,уп равления рабочим циклом. Одновременно по сигналам датчиков 9 и 10 температуЕМ в линии 41 связи формируется сигнал, пропорциональный MQ (минимальной скорости) и поступает на выход формирователя 38, где суммируется с сигналом, учитывающим положение направляющего аппарата, и с сигналом, учитывающим скорость приводного электродвигателя, поступающим по линии 27 связи. Полученный сигнал рассогласования подается по лиНИИ 42 связи на узел 34 для коррекции управления скоростью с учетом зоны пульсаций. Основной сигнал управления скоростью подается в линию 43 связи как разность сигнала, пропорционального М, и сигнала, учитывающего скорость приводного электродвигателя, и поступает на узел 34 .правления скорость ю и на узел 35 управления направляющим аппаратом.
Узел 36 защиты от перегрузки формирует выходной сигнал для управления скоростью и направляющим аппаратом, поступающий на узлы 34, 35 и 37, и сигнал отключения приводного электродвигателя, поступающий в линию 25 связи, и формируемый по входному сигналу, пропорциональному току приводного электродвигателя и поступающему по линии 26 связи. Узел 37 управления рабочим циклом формирует управляющий сигнал для узла 35 по сигналу датчика положения направляЪщего аппарата и по сигналу узла 36 защиты от перегрузки. С выхода узлу1 35 сигналы открытия или закрытия направляющего аппарата поступают на привод направляющего аппарата.
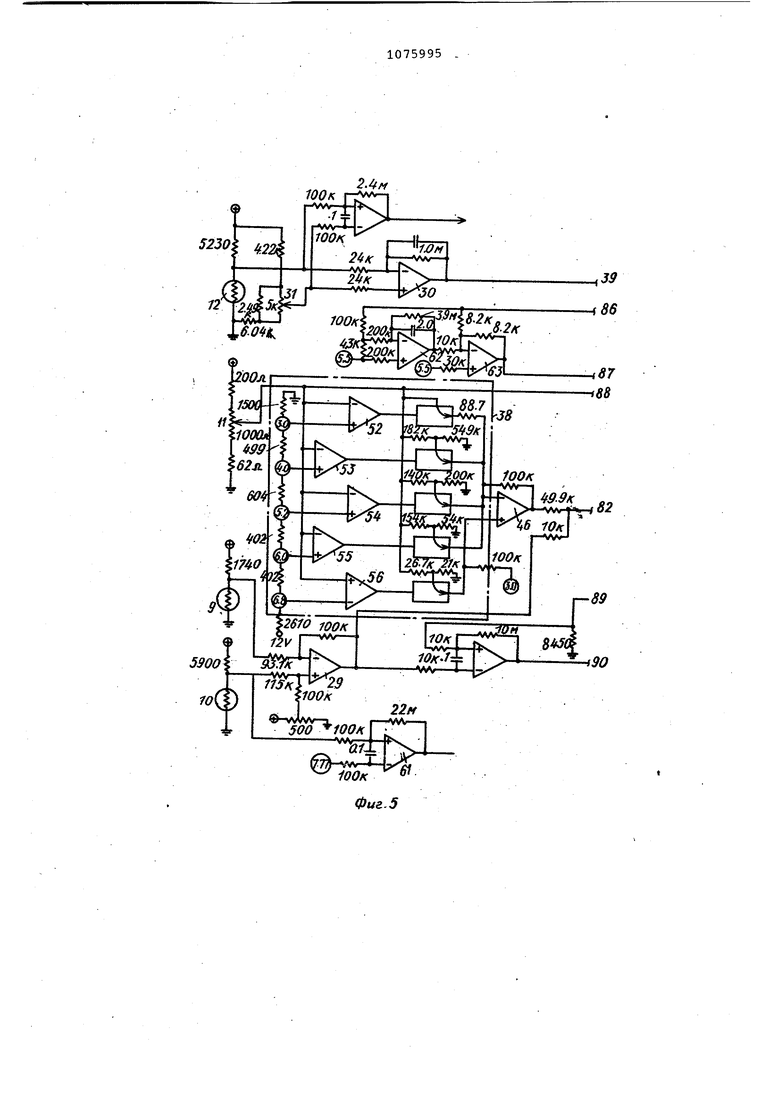
На фиг.5-7 показана принципиальная схема блока управления, позволяющая более детально рассмотреть управление компрессором. Сигналы датчика 12 и задатчика 31 температуры охлаждающей воды подаются на входы дифференциального усилителя 30,
что приводит к формированию сигнала ошибки, который по линии 39 связи через усилители 62 и, 63 поступает на узел 34 управления скоростью и непосредственно - на компаратор 48 формирователя 33 для выделения зоны нечувствительности, который формирует в линии 81 связи ло1:ическую едич ницу, если температура охлажденной воды выше заданного значения, и формирует логический нуль, если температура охлажденной воды ниже, заданного значения. Этот сигнал поступает на вход схемы НЕ-ИЛИ 64 и далее на узел 34 управления скоростью. Компараторы 49 и 50 формируют логические сигналы в случае выхода значения сигнала ошибки за пределы зоны нечувствительности.
Схемы НЕ-ИЛИ 65 и 66, НЕ-И 69 обеспечивают передачу логических сигналов к узлу 34 управления ско ростью, а усилители 62 и 63 образуют стабилизирующую, компенсирующую цепь, обеспечивающую опережение по фазе при 0,007 Гц и отставание по фазе при 0,02 Гц.
Сигнал от датчика 11 положения направляющего аппарата поступает на формирователь 38 и на вход компаратора 51. При этом на выходе компаратора 51 формируется логическая единица, если направляющий аппарат полностью открыт, которая поступает на вход схемы НЕ-И 69, подключенной через схему ИЛИ-НЕ,66 к узлу 34 управления скоростью. Одновременно сигнал с выхода компаратора- через ин вертор 78 поступает на схемы НЕ 74 и 75, с выхода которых сигнал поступает через схему НЕ-И 70 на узел 35 управления направл5цощим аппаратом. Сигнал, поступающий на формирователь 38, подается на входы компараторов 52-56 , выходы которых подключены к вентильным схемам. Сигналы с выхода вентильныхсхем подаются на сумматор 46, на выходе которого формируется сигнал, суммируемый с сигналом, пропорциональным, минимальной скорости М, который поступает с выхода усилителя 29, подключенного к датчикам 9 и 10 температуры, сформированный сигнал по линии 82 связи поступает на сумматор 47, на другой вход которого поступает сигнал, пропорциональный скорости приводного электродвигателя.
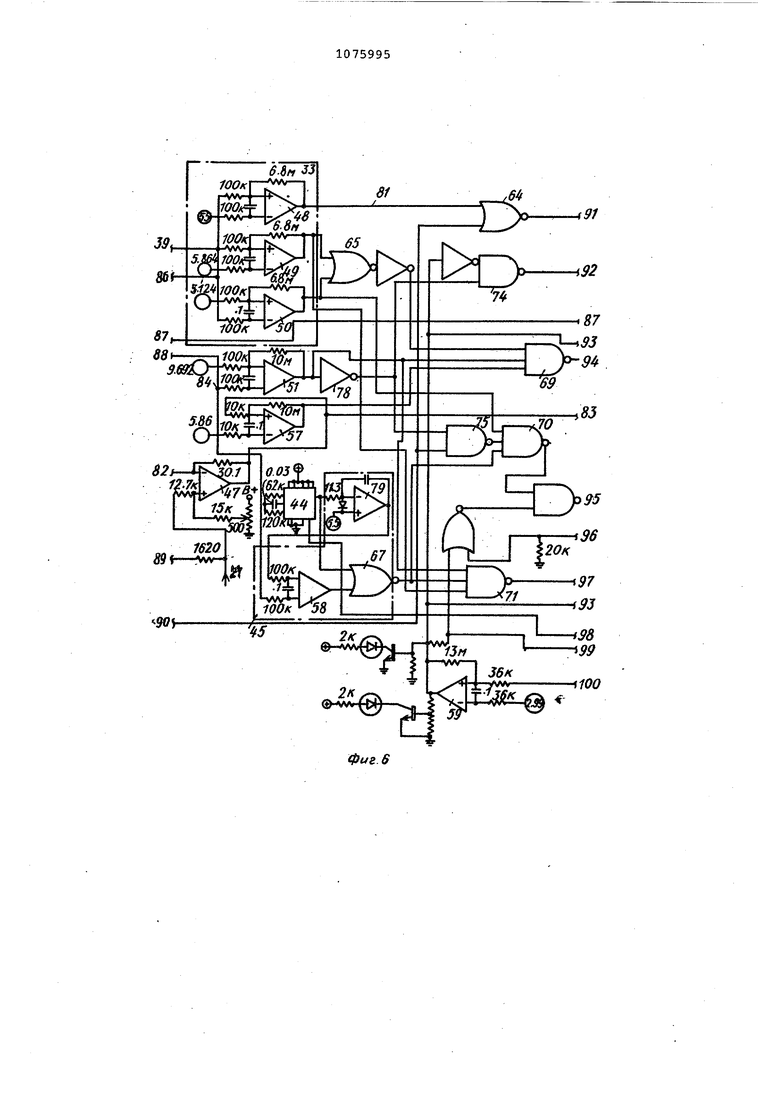
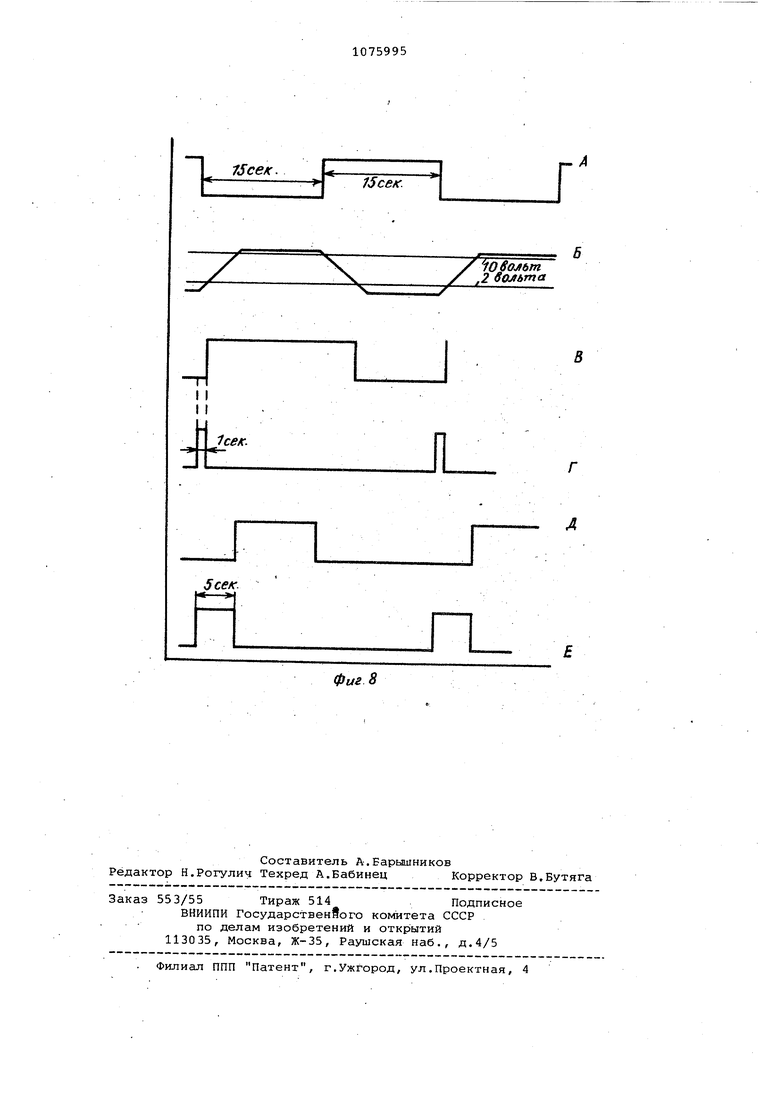
Разностный сигнал с выхода сумматора 47 поступает на узел 34 управления скоростью по линии 83 связи для коррекции, обеспечивающей устойчивый режим работы компрессора. Одновременно сигнал с выхода сумматора 47 поступает на компаратор 57, на выходе которого формируется логический сигнал, поступающий на схему НЕ-И 69 и указывающий выше или ниже заданного значения истинная скорост приводного электродвигателя.Этот сигнал используется для изменения команды управления скоростю приводного электродвигателя с целью получить более быструю реакцию системы, когда такое изменение не вызывает опасности возникновения пульсаци. Узел 37 управления рабочим циклом (фиг.4) содержит синхронизирующие генератор 44 и модулятор 45, включающий интегратор 79, схему НЕ-ИЛИ 6 и компаратор 58. Выходной сигнал синхронизирующего генератора 44 частотой 0,033 Гц, поступающий на вход интегратора 79 и схемы НЕ-ИЛИ 67, показан на фиг.ЗА. Схема НЕ-ИЛИ 67 формирует на своем выходе сигнал высокого уровня (логическую единицу) в случае, если оба ее вход ных сигнала низки или равны нулю. Интегратор, подключенный к синхронизирующему генератору, формирует .сигнал (фиг.8Б), который подается н компаратор. На другой вход компаратора поступает сигнал от датчика положения направляющего аппарата. При полностью зак{1ытом направляющем аппарате величина напряжения, поступающего от датчика 11 на вход компаратора 58, составляет 2в, что соответствует уровню нижней горизон тальной линии (фиг.8Б). Когда сигнал с выхода интегратора превысит указанный уровень, компаратор переключится, что приведет-к формированию сигнала (фиг.ВВ). Так как сигнал с выхода компаратора 58 поступа ет на вход схемы НЕ-ИЛИ 67, то на. выходе этой схемы формируется сигна (фиг.8г). Если направляющий аппарат полностью открыт, то величина напря жения, поступающего от датчика 11 на вход компаратора, составляет 10В что соответствует уровню верхней го ризонтальной линий (фиг.8Б. Когда сигнал с выхода интегратора превысит этот уровень, компаратор переключится, что приведет к формированию сигнала (фиг.8Д). На выходе схе мы НЕ-ИЛИ 67, соответственно, сформирован сигнал,( фиг.8Е). Таким образом, длительность импульса на вых де схемы НЕ-ИЛИ 67 зависит от полож ния направляющего аппарата и является в пределах 1-5 с. Этот сигнал используется для управления производительностью и подается на схемы НЕ-И 70 и 71 и далее на логические схемы, обеспечивающие перемещение направляющего аппарата подачей сигналов на узел 35 управления направляющим аппаратом, причем сигнал закрытия направляющего аппарата подается через cxeNfy НЕ-ИЛИ 68 И ц.-р-Ц транзистор на тирлстор 76 и в линию 84 связи, а сигнал открытия - через схемы НЕ-И 72 и 73, транзистор и тиристор 77 в ли-нию 85 связи. Переключатель 80 (показ.ан в положении автоматического управления) обеспечивает ручную установку направляющего аппарата в одно из трех положений (Фиксация, Открытие или Закрытие ). Узел 36 защиты от перегрузок (фиг.4) содержит компараторы 59-61, подключенные входами к линии 26 связи, по которой поступает сигнал, пропорциональный току приводного электродвигателя ( от трансформатора тока). Если ток приводного электродвигателя достигает заданной величины (100%) , компаратор 59 переключается и подает логический сигнал на узлы 34 и 35 управления скоростью и направляющим аппаратом, запрещающий увеличение скорости и открытие направляющего аппарата, пока сохраняется заданный уровень тока. Если уровень тока увеличивается до 103% уровня номинального значения, то переключается компаратор 60 и подает логический сигнал на узел 35, который формирует сигнал закрытия направляющего аппарата для уменьшения нагрузки. Едли ток увеличивается и далее, до 106% уровня номинального значения, то переключается компаратор 61 и подает в линию 25 связи логический сигнал, обеспечивающий отключение приводного электродвигателя . Таким образом, предлагаемое устройство, реализующее предла1аемый способ, позволяет повысить точность управления компрессором за -счет лучшего приближения к режиму оптимального управления.
1/8 Щ1/25/if
А
от
IV
фиг J
га
фие.Л
52Щ If.
5900
39
м
91
MOO
фиг 6
91
.®
9г
1QO
sf jffir
фиг. 7
1
75сек.
к
z
I I I I
15сек.
Х
/ .2 Sa ольта
5
1сек.
Г
5С€К
Фиг 8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления осевым вентилятором | 1974 |
|
SU561058A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
