Изобретение касается способа устранения кр1ит1ической скорости ротора (в рабочем диапазоне его работы), при которой появляющаяся возмущающая период-ическая сиаа создает сильные колебания вала и вызывает тряоку всей установки.
Особенйостью изобретения является устранение :ритической скорости -оризонтального или вертикального ротора на подщипниках каченвя путем помещения на роторе, вбливи его опор, двух дополнительных грузов, имеюнхих суммарную неуравиовещенность большую, чем у ротора и противоположно направленную. Приэтом ротор предпо.иагается упругим, а в подщипниках есть зазоры, примерно одинаковые для обеих опор.
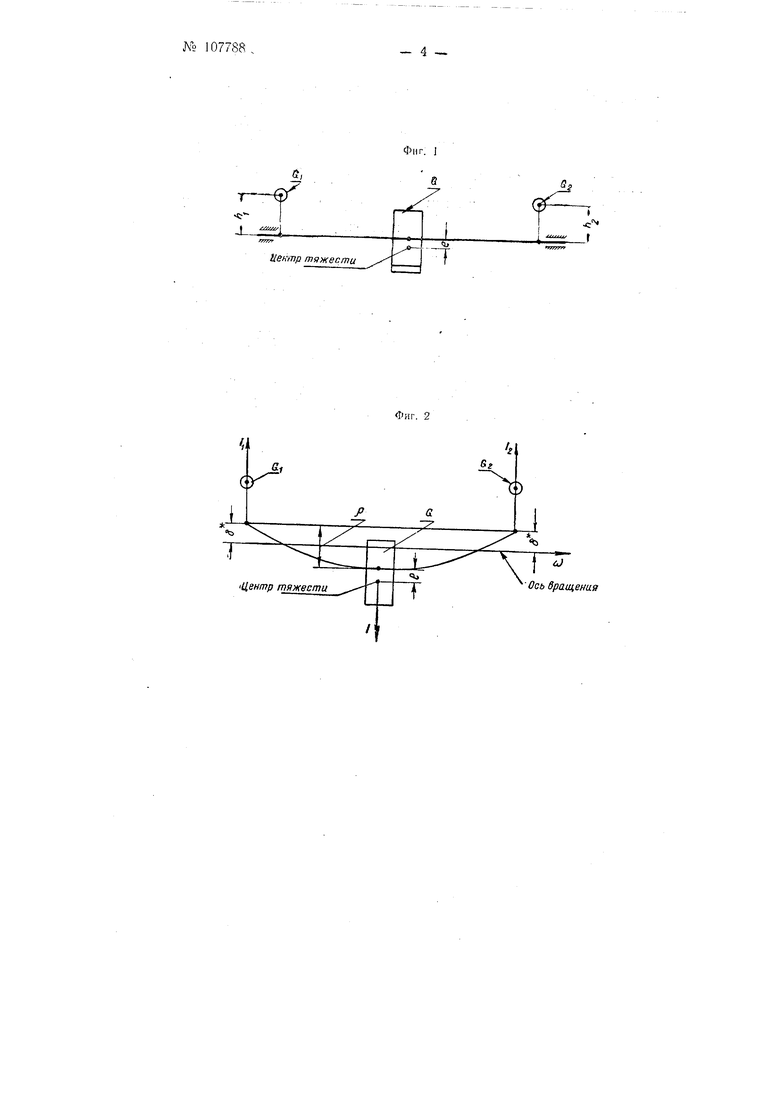
На фиг. 1 изображена схема расположения грузов на роторе, где: G - вес ротора; GI « Gg-вес дополнительных грузов; /ti W hz - вынос грузов относительно оси недеформированного ротора; е - смещение центра тяжести ротора относительно его оси.
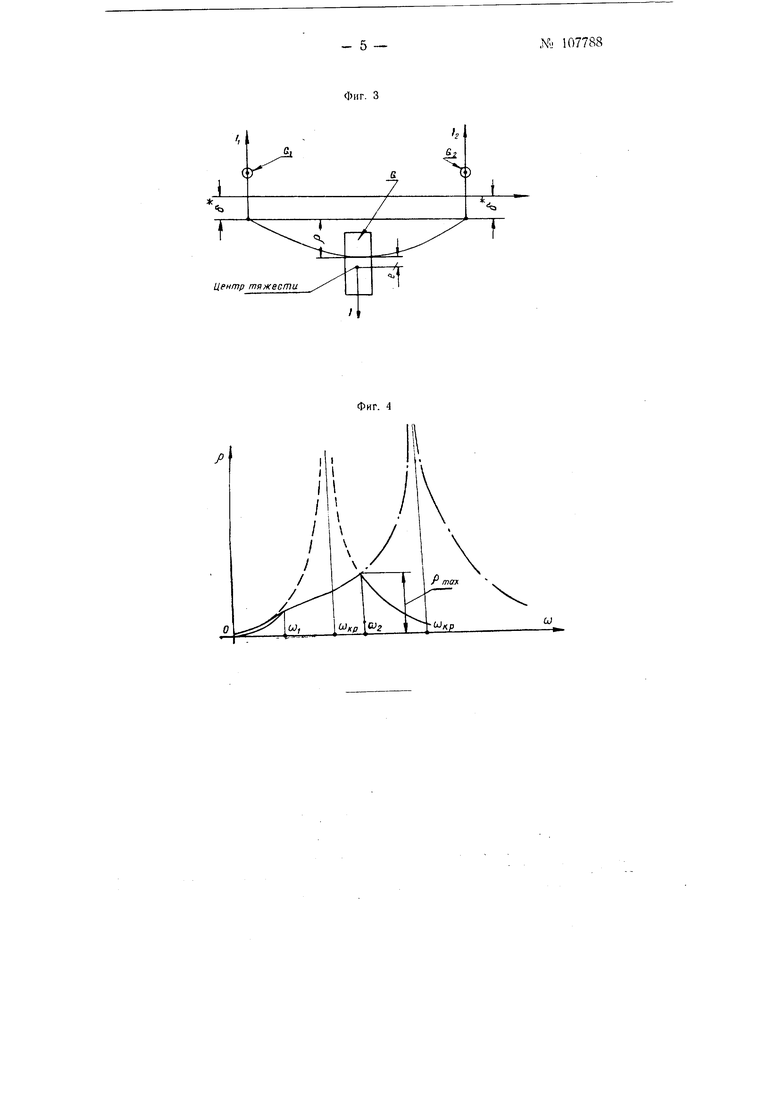
На фиг. 2 -схема действия центробежных сил инерции в зависимости от скорости вращения ротора при ,-где: со-текущее значение угловой скорости вращения; /i и /о- центробежные сиьты инерции от грузов GI и GZ; С - прогиб ротора от
дисбаланса; е - смещение центра тяжести относительно оси недеформированного ротора; 8 - зазор в подщипниках.
- На фиг. 3 схема действия центробежных сил инерции в зависимости от скорости вращения ротора при ю Икр, где: со - текущее значение угловой скорости вращения; /i и /2- центробежная сила «нерции от грузов GJ и GZ; р -прогиб ротора от дисбаланса; е - смещение центра тяжести относительно оси недеформированного ротора; 8 - зазор в подщи1ПН Иках.
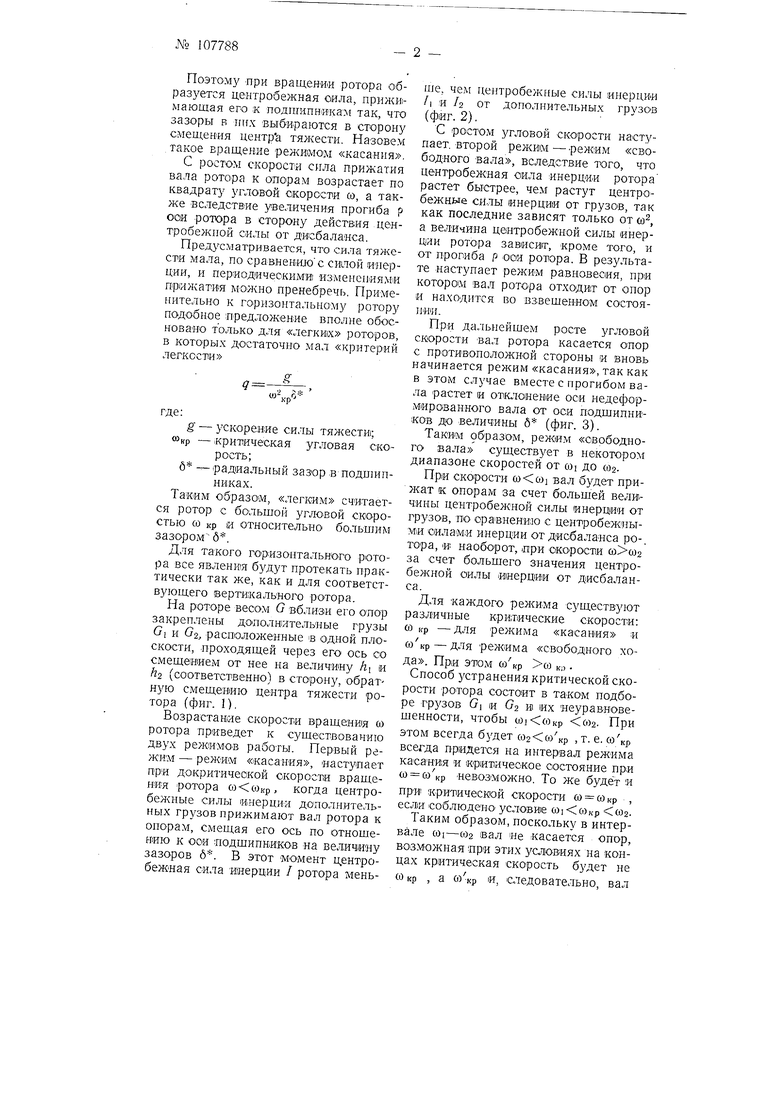
На фиг. 4-график изменения прогиба по угловой скорости вращения ротора, где: со, - угловая скорость вращения ротора в момент отрыва от оцор; со кр - критическая скорость опертого ротора; 0)2 - угловая скорость вращения ротора в момент касания опор после пр9хода критической скорост1и; сокр -критическая скорость свободного (не опертого) ротора.
Неуравновещенность ротора обусловлена наличием дисбаланса, имеющего место вследствие неизбежных технологических ощибок, при которых центр тяжести, ротора оказывается всегда смещенным относительно оси вращения на некоторую малую величину.
Поэто-м} при вращении ротора образуется центробежная сила, прижимающая его к подпгипнйкам так, что зазоры в них выбираются в сторон} смещения центра тяжести. Назовем такое вращение режимом «касания.
С ростом скорости сила прижатия вала ротора к опорам возрастает по квадрату угловой скорости со, а также вследствие увеличения прогиба р ОСИ ротора в сторону действия центробежной силы от дисбаланса.
Предусматривается, что сила тяжести мала, по сравнениюс силой инерции, и периодическими измеиепиям1И прижатия можно пренебречь. При.меиительно к горизонтально МЗ ротор) подобное предложение вполне обосновано только для «легкий роторов, в которых достаточно мал «критерий легкости
д v где;
g - ускорение силы тяжести;;
Окр - .критическая угловая скорость;
б -радиальный зазор в подпшпниках.
Таким образом, «легким считается ротор с большой угловой скоростью со кр и относительно большим зазором б.
Для такого горизонтального ротора все явления бздут протекать практически так же, как и для соответствующего вертикального ротора.
На роторе весом G вблиз1И его опор закреплены дополнительные грузы GI и G2, расположенные в одной плоскости, проходящей через его ось со смещением от нее на величину hi и Й2 (соответственно) в сторону, обратную смещению центра тяжести ротора (фиг. 1).
Возрастание скорости вращении со ротора приведет к существованию двух режимов работы. Нервый режим - режим «касания, наступает при докритической скоро сти вращения ротора о)сокр, когда центробежные силы И|Нерции дополнительных грззов прижимают вал ротора к опорам, смещая его ось по отнощению к оси подшипников на величину зазоров б. В этот момент центробежная сила инерции / ротора меньHJe, чем центробежные силы инерции /I и /2 от дополнительных грузов (фиг. 2).
С ростом згловой скорости настзцает. второй рел И1М-режим «свободного вала, вследствие того, что центробежная сила инерции ротора растет быстрее, чем растут центробежные силы инерции от грузов, так как последние зависят только от (о, а величина центробежной силы инерции ротора зависит, кроме того, и от прогиба р оси ротора. В результате наступает режим равновесия, при котором вал ротора отходит от опор и находится во взвещенном состояННИ.
При дальнейщем росте угловой скорости вал ротора касается опор с противоположной стороны и вновь начинается режим «касания, так как в этом случае вместе с прогибом вала растет и отк чонение оси недеформированнОГо вала от оси подщидников до величины б (фиг. 3).
Таким образом, режим «свободного вала существует в некотором диапазоне скоростей от ол до со2.
При скорости вал будет прижат к опорам за счет большей величины центробежной силы инерции от грузов, по сравнению с центробежяыми силами инерции от дис баланса ро-. тора, и наоборот, .при скорости за счет большего значения центробежной силы инерции от дисбаланса.
Для каждого режима существуют различные критические скор|ости: со кр -для режима «касания и сокр - для режима «свободного хода. При этом сокр СО Ki)
Способ з-странения критической скорости ротора состоит в таком подборе грузов GI и G2 W их неуравновешенности, чтобы о)2. При этом всегда бздет )кр , т. е. сокр всегда придется на интервал релшма касания и критическое состояние при w сокр -невозможно. То же будет и
ПрИ критической скорости со со кр ,
если соблюдено условие со2. Таким образом,поскольку в интервале coi-С02 вал не касается опор, вОЗ.можная дри этих зсловиях на концах критическая ско1рость будет не со кр , а сокр и, следовательно, вал
пройдет интервал o)i-(02 без критической скорое™. Это будет исключать или значительно уменьшать сильные колебания ротора, которые имели бы место при критаческой скорости.
Угловые скорости «i перехода от первого режима ко второму «а HI перехода от второго к первому вычисляются аналитически в зависимости от величины подобранных грузов GI и GZ, их выноса А и h, а также в зависимости от смещенвя центра тяжести е и от зазора в подшипниках
Изменение прогиба р ротора в зависимости от угловой скорости (О
представлено на фиг. 4. Здесь пунктирной кривой изображено изменение протиба для опертого ротора, а штрихпунктирной для «свободного ротора, т. е. бы при любом значении (О он был бы «свободным. Жирной криздой обозначено фактическое изменешие прогиба присоблюдеИИИ условия: ( ) крКак ВИДНО, в этом случае величина прогиба при любом значении « имеет конечную вели141ину и принимает максимальное значение при ш &2Применение предложенного способа устраняет необходимость делать ротор и корпус машины слишком жесткими для повышения его критической скорости.
П р е д |м е т изобретения
Способ устранения критической скорости ротора на подшипниках качения, отличаюш,ийся тем, что к ротору, вблизи его опор, со стороны противоположной прогибу, вызываемому дисбалансом, в плоскости, проходяшей через ось ротора и центр тяжести, крепят на требуемом расстоянии от оси враш,ения грузы с суммарной неуравновешенностью большей, чем у ротора.
Центр тяжести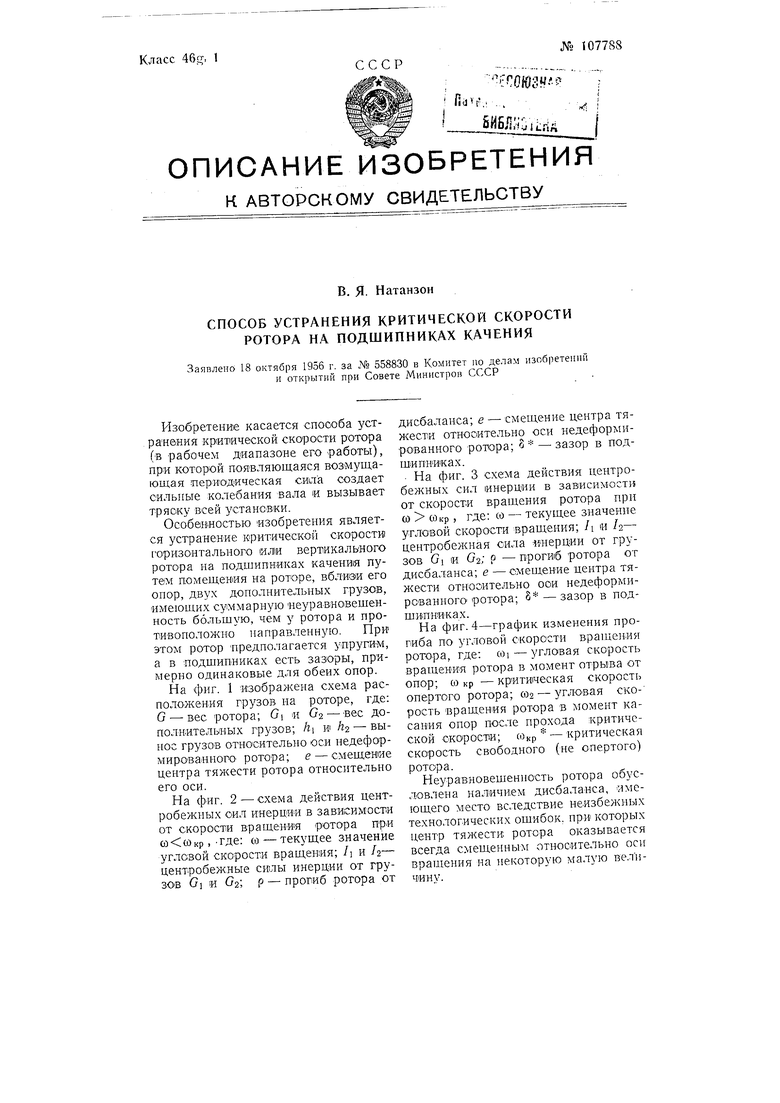
| название | год | авторы | номер документа |
|---|---|---|---|
| МАСЛОРАСПРЕДЕЛИТЕЛЬНОЕ УСТРОЙСТВО ПОВОРОТНО-ЛОПАСТНОЙ ГИДРОМАШИНЫ | 1994 |
|
RU2075628C1 |
| СПОСОБ МОНТАЖА РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2578500C1 |
| СПОСОБ МОНТАЖА РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2528789C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ФАЗОВЫХ ПЕРЕХОДОВ В ПОДВИЖНЫХ КОНСТРУКЦИЯХ С БАЛАНСИРОВОЧНЫМ КОЛЬЦОМ | 2005 |
|
RU2321844C2 |
| СПОСОБ МОНТАЖА РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2599077C1 |
| Центробежная мельница | 1985 |
|
SU1333407A1 |
| ИНЕРЦИОННЫЙ СЕПАРАТОР | 2015 |
|
RU2674203C2 |
| Упруго-предохранительная центробежная муфта | 1975 |
|
SU608024A1 |
| Опора инструментального шпинделя | 1978 |
|
SU730554A1 |
| СПОСОБ ОЦЕНКИ ИЗНОСА ПОКРЫТИЙ И КАЧЕСТВА ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ МАШИН В РАЗЛИЧНЫХ СРЕДАХ | 2005 |
|
RU2308701C2 |