Кроме Torog в процессе эксплуатации муфты гибкая связь вытягивается, степень прижатия еэ к шкиву уменьшается. Это приводит к уменьшению надежности муфты в работе.
Целью изобретения является упрощение конструкции и повыиение иагруэочной способности муфты путем обеспчения самонатяжения гибких связей.
Цель достигается благодаря тому, что в предлагаемой упруго-предохранительной центробежной муфте каждый ролик имеет выступ в виде кольцевого
) -/«и-СК,-Я)-|-Я- оТ ч1
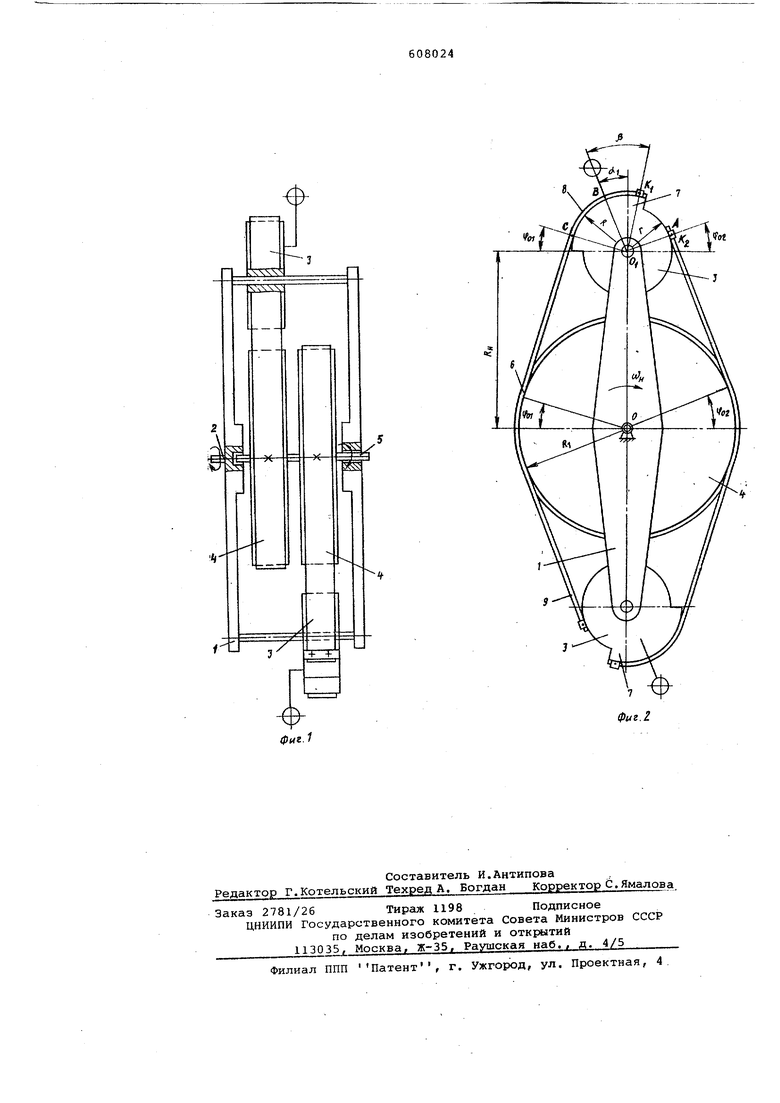
U-P) (.рЬш..,. WT,.U,-r).d,)e WR;-(v где „ arcsi-« i 4 «ai-c5iM ---, н TO величина относительной деформации гибкой связи при холостом ходе ; TO - усилие натяжения гибкой св зи при холостом ходе; Е - модуль упругости материала гибкой связи; F - площадь поперечного сечени гибкой связи; Т - радиус цилиндрической поверхности выступа ролика; f - радиус цилиндрической пове ности ролика; Р - - отношение радиуса цилиндри ческой поверхности ролика к радиусу цилиндрической поверхности выступа; R г радиус шкива; Д| - номинальное значение коэффициента трения в месте контакта гиб кой связи со шкивом; HH - расстояние между осями вра щения шкива и ролика; .-.. где TK и 2 усилия натяжения соответственно ведущей и ведомой ветвей гибкой связи в режиме буксования; сС - угол поворота центра тяжест ролика относительно прямой, соединяю щей центры вращения шкива и ролика. На фиг, 1 и 2 схематически изобра жена предлагаемая упруго-предохранительная центробежная му-фта,1виды сбо ку и с торца соответственно. Водило 1 жестко закреплено на ведущем валу 2 и несет шарнирно устано ленные на нем неуравновешенные относительно своих осей вращения ролики являющиеся сателлитами по отношению к шкивам 4, установленным на ведомом /валу 5,
сектора, радиус цилиндрической поверхности которого больше радиуса ролика, ведущий конец гибкой связи закреплен на цилиндрической поверхности выступа, а ведомый конец - на цилиндрической поверхности ролика.
Такая конструкция муфты позволяет отказаться от пружинного натяжного устройства.
Кроме того, с целью повышения ста) бильности срабатывания муфты параметры ее конструктивных элементов выбраны в соответствии с уравнением
О, )(f-4, Ролики 3 соедине йл со шкивами 4 гибкими связями б. Каждый ролик имеет выступ 7 в виде кольцевого сектора, радиус R цилиндрической поверхности которого больше радиуса f наружной поверхности ролика. Ведущая ветвь 8 ;каждой гибкой связи закреплена на выступе ролика, а ведомая 9 - на самом ролике. Работа муфты в режиме пуска. При пуске двигателя начинает вращаться водило 1, закрепленное на ведущем валу 2. При этом на неуравновешенные ролики-сателлиты 3 начинают действовать, центробежные силы, стремящиеся повернуть их так, чтобы удалить центр их .тяжести на максимальное расстояние от оси вращения водила. Момент центробежной силы осуществляет натяжение гибкой связи б, поскольку чем больше повернется ролик 3 ,тем больше будет дуга большего радиуса на ролике, на которую накладывается гибкая связь. Длина гибкой связи выбирается такой, чтобы даже при отсутствии нагруз;ки на ведомом валу 5 центр тяжести ролика не мог бы оказаться на линии, соединяющей оси вращения ролика и водила (шкива). По мере увеличения скорости вращения водила растет величина центробежной силы, действующей на ролик, а следовательно, и усилие прижатия гибкой связи к шкиву. На начальном этапе разгона усилие прижатия гибкой связи к шкиву мало. Это позволяет использовать двигатели с малым пусковым моментом и небольшими габаритами, увеличить КПД двигателя в установившемся режиме работы. В некоторый момент усилие прижатия гибкой связи к шкиву достигает такой величины, что сила трения, обусловленная этим прижатием, начинает превосходить момент сил сопротивления на ведомом валу. Начинается разгон ведомого вала, заканчивающийся выравниванием средних скоростей ведущего и ведомого валов. Работа муфты в установившемся режиме. По окончании периода пуска муфта начинает работать в режиме квазиупругой. Этот режим характеризуется тец что момент сил сопротивления не достигает критической величины, при ко торой начинается проскальзывание гиб кой связи относительно шкива. Изменение величины момента сил сопротивления на ведомом валу приводит при этом к перераспределению усилий в вe дущей и ведомой ветвях гибкой связи, а следовательно, и к нарушению равно весия ролика. Ролик начинает поворачиваться в такое положение, при котором момент центробежной силы инерции уравновесит момент на ролике, со здаваемый новыми усилиями в гибкой связи. Но поворот ролика относительно водила приводит к повороту ве домого шкива относительно водила, т.е к изменению угла деформации муфты. Очевидно, что углы деформации муф ты могут при этом достигать нескольких десятков градусов. Если же момент сопротивления на вё домом валу достигает критической величины, то происходит.срабатывание муфты. Работа муфты в предохранительном режиме. Этот режим работы, как и пуск, ха рактеризуется проскальзыванием гибкой связи относительно шкива. При ударном нагружении ведомого вала нагрузкой, большей момента сил трения, обусловленного прижатием гибкой связи к шкиву, ведомый вал начинает останавлиBoiTbCH, Ведущий вал продолжает вращение со скоростью двигателя. Так как момент инерции ведомых частей муфты значительно меньше мотлента инерции ротора двигателя, то и динамические нагрузки в звеньях агрегата будут значительно меньшими, чем в агрегате без муфты. Через некоюрое время защита (например, тепловая защита двигателя) от ключит двигатель. Остановится и ведущий вал. В установившемся режиме работы на неуравновешенный ролик действует центробежная сила инерции. Момент этой силы относительно оси вращения ролика определяется уравнением M V%inoi., где m - масса неуравновешенной части ролика; расстояние между осями вращения шкива и ролика; - скорость вращения водила; о. - угол поворота центра тяжести ролика относительно прямой, соединяющей центры вращения шкива и ролика. Изменению величины крутящего мо- I мента будет соответствовать изменение величины угла- . Вариация последнего может достигать нескольких десятков , градусов, чем объясняется большая податливость муфты в установившихся ре.«имах работы. При достижении моментом сил сопротивления критической величины начинается скольжение гибкой связи по шкиву, закрепленному на ведомом валу. Влияние изменения коэффициента трегНия в месте контакта гибкой связи со ркйвом на стабильность срабатывания МУФть можно определить следующим об|разом. Пусть длина дефорФшрованной гибкой связи при холостом ходе будет Ь„, а длина недеформированной гибкой связиL , тогда / I-TO . О) где TO - усилие натяжения гибкой cBst зи при холостом ходе Е - модуль упругости материала гибкой связи; F - площадь поперечного сечения гибкой связи. Длина L может быть подсчитана исходя из следующих соображений; при холостом ходе точка К g крепления гибЬ ой связи к ролику должна совпадать с тэчкой А начального касания гибкой связи к ролику. Следовательно, при холостом ходе длина ведомой ветви рав1 la , «.-/R,4V . Допустим, что при холостом ходе положение центра тяжести шкива может быть координировано углом Л . Для того, чтобы это условие выполнялось, необходимо, чтобы угол между прямой 0 В , характеризующий положение центра тяжести шкива, и прямой 0 К ; бьш равен: где Ypj - угол между прямой и прямой, перпендикулярной оси вращения шкива. Условие устойчивости работы муфты в режиме динамического равновесия мо ет быть определено в виде 1Г Следовательно, на выбор точки К крепления гибкой связи к выступу шки-i ва накладывается ограничение ВО к,- Z где о угоп между прямой СО (точка С - точка касания гибкой связи со шкивом) и прямой, перпендикулярной оси вращения шкива; JS - угол между прямой ВО и пря мой Ki, О . При невыполнимости условия (5) будет невозможен поворот шкива на угол .. Примем foi .С учетом этого обстоятельства длина ведущей ветви гибкой связи при холостом ходе будет равна: б1 Общая длина Ь гибкой связи при хо лостом режиме работы может быть опре делена с помощью уравнений (2) и (6) (7 « (Rr)- |(,+ y.TR Допустим, что при полном проскальзывании гибкой связи шкив устанавливается в положении, характеризуемом углом oL . При этом длины ветвей гибкой связи могут быть определены уравнениями:тглина ведущей ветви ,el-R(««.-,); длина ведомой ветви е (oL-AJ. Полная длина деформированной гибкой связи в режиме буксования равна: .) t + е - CR - f КА-, )-f (ir-t-fo «f ;t R.,. Связь lig с длиной U недеформированной гибкой связи может быть определена уравнением: в. «() где ДЬр - деформация гибкой связи в режиме буксования. Найдем величину этой деформации в первом приближении, подставляя в урав нение Гука вместо недеформированнык ветвей размеры деформированной гибкой связи. Так как предполагается, что деформации гибких звень ев незначительны, то -связанная с этим упрощением ошибка в величине деформации будет невелика. С учетом этого обстоятельства с т f г Г.оч(ог)И, AL.., U2J где Т и г иатяжение соответствен но ведущей и ведомой ветвей в режиме буксования; ) - натяжение гибкой связи на дуге обхвата ведомого шкива. UOJСогласно урав1 ению Эйлера , лч . ,(,г де (J - коэффициент трения в конакте гибкой связи с ведомым шкивом. 2..П4) де; ,.. Подставляя уравнения (13) и (14) уравнение (12) , получим: ,Е,е«.е,:5. 6 EF L:I .. .Решим совместно уравнения (1), (111), (15), (7) и (10) : U-(P-f KdL-c 4) где Y|r - величина относительной деформации гибкой связи при холостом ходе. Для определения зависимости Тд от Д в явном виде рассмотрим условие равновесия сателлита. В режиме пробуксовывания: VsinA T.jRCe Vp), (ЛЧ .. Аналогично для режима холостого хс}а может быть записано: Уз111о1 :ТдТ1(-р).«р)ЕРК. ав) Из уравнений (17) и (18) получаем: sind. IF Чтобы уяснить значение параметра 0 в уравнениях (19) и (16) выводим равенства: , . . , о,-агС51П н При принятых параметрах муфты и значении cL уравнения (19) и (16) представляют собой систему с неизвестными сС и Т . Решив эту систему уравнений относительно Tj , нетрудно найти момент ;М , с которым гибкая связь воздействует на ведомый вал: c -2Tl 2 i e --f). (22) Подставляя в уравнение (22) уравнение (19), получим: M(.«te, .. (23) - -ттг.-. . . р Sfn OL. Очевидно, что стабильность момент срабатывания М определяется стабильностью величины Q , Чувствительность по отношению к в личине коэффициента трения . может быть определена в виде: /„ л а За ,„, - ( I. 94i тр тР ЭЛ1 / B, 2Л (е -яКе -О Но величина Э положительна при люб ;допустимых значениях параметров Moi Л// Следовательно, чувствител ность , равная, нулю, может быть
С f -Я) УНн-(В,-1-о - /Нн-(Г - -Т - оч- Чо2 Я J
(,. - ,-u,-HVp(f-) Такой подбор параметров позволяет увеличить стабильность срабатывания ,муфты , уменьшить расчетный коэффици5ент запа: а прочности при конструировании и, следовательно, удешевить муфту. Формула изобретения 1. Упруго-предохранительная центробежная муфта, содержащая шкивы, ydтановленные на ведомом валу, и неуравновешенные относительно своих осей вращения ролики, „вязанные со шкивами; гибкими связями, а с ведущим валом водклом, отличающаяся Tejvi, €(-р) У( У f /Ufo .f I i , - U -p)sincc (VR -CH-f))e j. 1Й juD л l±ll. I CS-ti ) . -P oircsin -;;-; -|fp - величина относительной деформации гибкой связи при холостом ходе; TO - усилие натяжения гибкой связи при холостом ходе; Е - модуль упругости материала гибкой связи;. F - площадь поперечнсгс сечения гибкой связи; Т - радиус цилиндрической по верхности выступа ролика; h - радиус цилиндрической по верхности ролика; bii- отношение радиуса цилиндрической поверхности ролика к радиуqy цилиндрической поверхности выступа
л получена лишь при выполнимости условияНо согласно статической характеристик ке увеличение момента сопровождается увеличением угла деформации оС Таким образом, на устойчивой ветви характеристикиЦ-.о. Очевидно, что в этих условиях оказывается целесообразным принять ci. « что может быть обеспечено подбором н4минальных значений параметров, соответствующих уравнению ,что с целью упрощения ее конструкции И повышения нагру:эочной способности путем обеспечения самонатяжения гибких связей, каждый ролик имеет выступ в виде кольцевого сектора, радиус цилиндрической поверхности которого больше радиуса ролика, ведущий конец гибкой связи закреплен на цилиндрической поверхности этого выступа, а ведомый конец - на цилиндрической поверхности ролика, .2. Муфта поп,1, отличающ а я с я тем, что, с целью повыше,ния стабильности срабатывания муфты, параметры ее конструктивных элементов ;выбраны в соответствии с уравнением: яУ- , 2 ,и- ., е °Ир ( 7r-S TJ ,, K - радиус шкива; (f - номинальное значение ко:Эффициента трения в месте контакта гибкой связи со шкивом; 1 к - расстояние между осями вращения шкива и ролика; где Т, и Тд - усилия натяжения cooTBeijственно ведущей и ведомой ветвей гибкой связи в режиме буксования; с 1 - угол поворота центра тяжести ролика относительно прямой, сое| диняющей центры вращения шкива и ро|лика. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № 451879, кл, Р 16 В 43/20, 1973. : 2. Авторское свидетельство. СССР № 484330, кл. F 16 D 43/20, 1973.
-. j
fill
-Ффигffft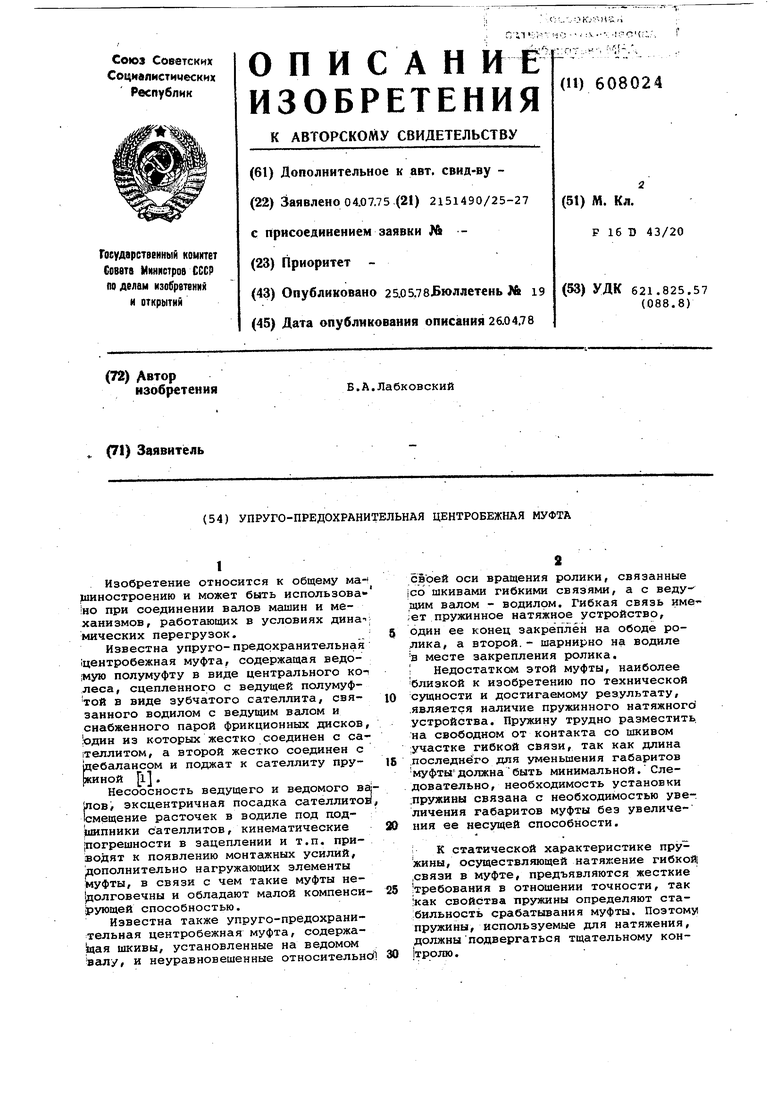
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения передаваемого крутящего момента муфты | 1976 |
|
SU591640A1 |
| Предохранительная центробежная муфта | 1975 |
|
SU823697A1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАТЯЖЕНИЯ ПЕРЕДАЧИ ГИБКОЙ СВЯЗЬЮ | 2008 |
|
RU2509934C2 |
| МУФТА ПРИВОДА БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ | 2014 |
|
RU2622510C1 |
| Устройство для измерения крутящегоМОМЕНТА | 1979 |
|
SU838451A1 |
| Упруго-предохранительная центробежная муфта | 1973 |
|
SU484330A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1989 |
|
SU1664672A2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| КЛИНОЦЕПНОЙ ВАРИАТОР | 2003 |
|
RU2321786C2 |