(Л
с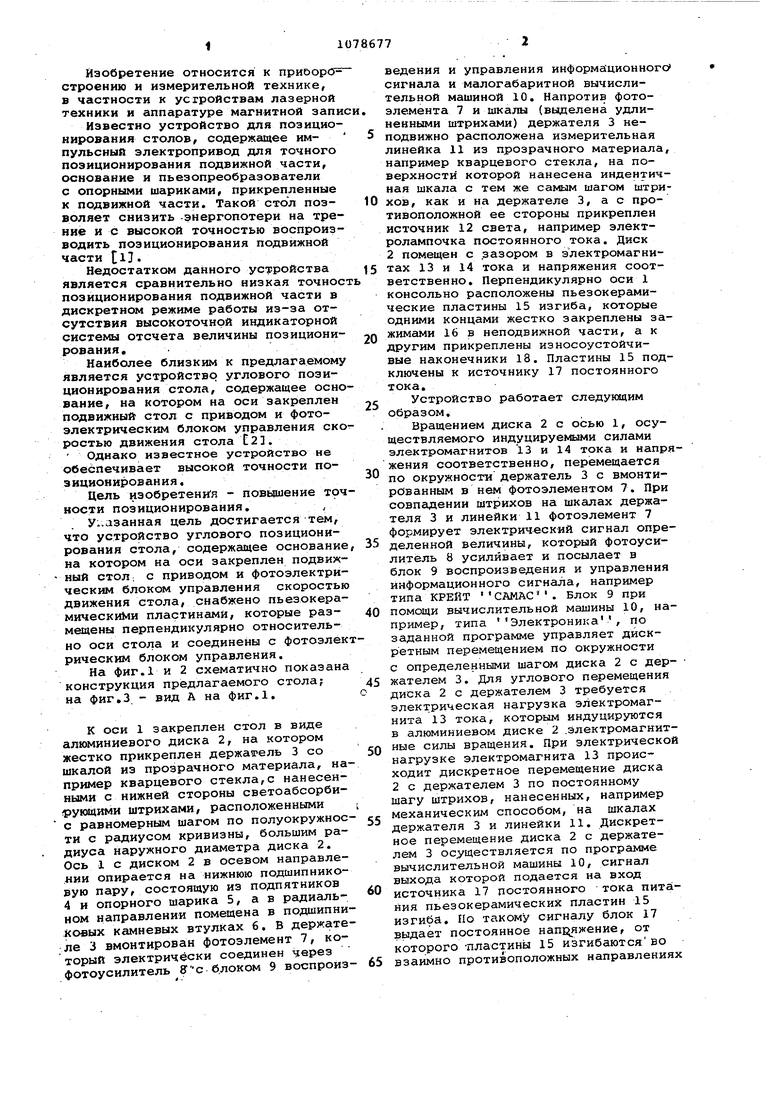
| название | год | авторы | номер документа |
|---|---|---|---|
| Печатающее устройство | 1980 |
|
SU984882A1 |
| Фотоэлектрический преобразователь угловых перемещений | 1977 |
|
SU696280A1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| ПРЕОБРАЗОВАТЕЛЬ КРУГОВЫХ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2057287C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БАЗИСА СТЕРЕОРЕНТГЕНОГРАФИИ | 2008 |
|
RU2372847C1 |
| Центрирующее устройство | 1983 |
|
SU1113666A1 |
| НАСТОЛЬНОЕ РЕЖУЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2398674C1 |
| НАСТОЛЬНОЕ РЕЖУЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2396162C1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU822118A1 |
| Фотоэлектрический преобразовательуглА пОВОРОТА ВАлА B чиСлО | 1979 |
|
SU849266A1 |
УСТРОЙСТВО УГЛОВОГО ПОЗИЦИСШИРОВАНИЯ СТОЛА, содержащее основание, на котором на оси закреплен подвижный стол с приведем и фотоэлектрических блоком управления скоростью движения стола, о тли ч- а юц е.е с я тем, что, с целью повышения точносфи позиционирования стола, оно снабжено пьеэокергтическими пластинами, которые размещены п пендикулярно относительно оси стола и соединены с фотоэлектрическим б локст управления.
СХ)
л
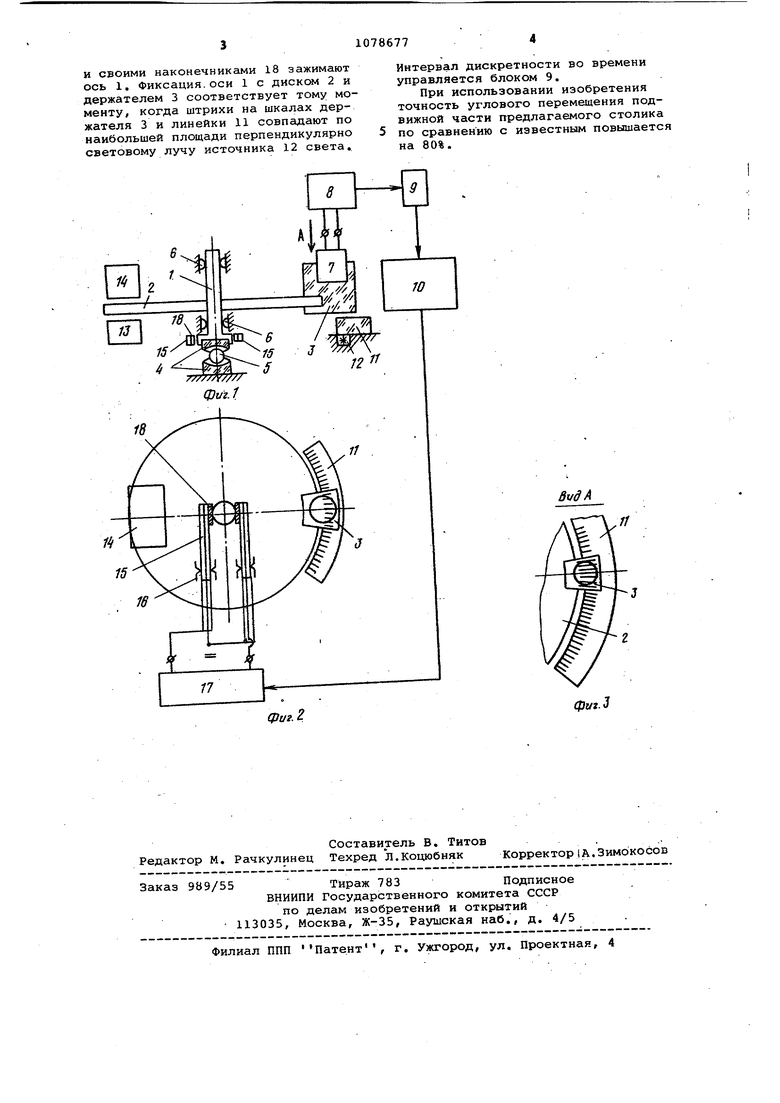
Ч Изобретение относится к при&орО строению и измерительной технике, в частности к усгройствам лазерной техники и аппаратуре магнитной зап Известно устройство для позицио нирования столов содержащее импульсный электропривод для точного позиционирования подвижной части, основание и пьезопреобразователи с опорными шариками, прикрепленные к подвижной части. Такой стол позволяет снизить -энергопотери на тре ние и с высокой точностью воспроиз водить позиционирования подвижной части tlJ Недостатком данного устройства является сравнительно низкая точно позиционирования подвижной части в дискретном режиме работы из-за отсутствия высокоточной индикаторной системы отсчета величины позициони рования. Наиболее близким к предлагаемому является устройство углового позиционирования стола, содержащее осно вание, на котором на оси закреплен подвижный стол с приводом и фотоэлектрическим блоком управления ско ростью движения стола Е2. однако известное устройство не обеспечивает высокой точности позиционирования , Цель изобретения - повышение точ ности позиционирования. , Указанная цель достигается тем, что устройство углового позиционирования стола, содержащее основание на котором на оси закреплен подвиж ный стол, с приводом и фотоэлектрическим блоком управления скоростью движения стола, снабжено пьезокерамически ли пластинами, которые размещены перпендикулярно относительно оси стола и соединены с фотоэлек рическим блоком управления. На фиг.1 и 2 схематично показана конструкция предлагаемого стола на фиг.З - вид А на фиг.1. К оси 1 закреплен стол в виде алюминиевого диска 2, на котором жестко прикреплен держатель 3 со шкалой из прозрачного материала, на пример кварцевого стекла,с нанесенными с нижней стороны светоабсорбирукмцими штрихами, расположенными с равномерным шагом по полуокружнос ти с радиусом кривизны, большим радиуса наружного дис1метра диска 2. Ось 1 с диском 2 в осевом направлении опирается на нижнюю подшипниковую пару, состоящую из подпятников 4 и опорного шарика 5, а в радиальном направлении помещена в подшипни ковых камневых втулках 6. В держате ле 3 вмонтирован фотоэлемент 7, который электрически соединен через фотоусилитель ff-c б.локом 9 воспроиз ведения и управления информационного сигнала и малогабаритной вычислительной машиной 10. Напротив фотоэлемента 7 и шкалы (выделена удлиненными штрихами) держателя 3 неподвижно расположена измерительная линейка 11 из прозрачного материала, например кварцевого стекла, на поверхности которой нанесена индентичная шкала с тем же самым шагом штрихов , как и на держателе 3, а с противоположной ее стороны прикреплен источник 12 света, например электролампочка постоянного тока. Диск 2 помещен с .зазором в электромагнитах 13 и 14 тока и напряжения соответственно. Перпендикулярно оси 1 консольно расположены пьезокерамические пластины 15 изгиба, которые одними концами жестко закреплены зажимами 16 в неподвижной части, а к другим прикреплены износоустойчивые наконечники 18. Пластины 15 подключены к источнику 17 постоянного тока. Устройство работает следующим образом. Вращением диска 2 с осью 1, осуществляемого индуцируемыми силами электромагнитов 13 и 14 тока и напряжения соответственно, перемещается по окружности держатель 3 с вмонтированным в нем фотоэлементом 7. При совпадении штрихов на шкалах держателя 3 и линейки 11 фотоэлемент 7 формирует электрический сигнал определенной величины, который фотоусилитель 8 усиливает и посылает в блок 9 воспроизведения и управления информационного сигнала, например типа КРЕЙТ САМАС . Блок 9 при помощи вычислительной машины 10, например, типа Электроника, по заданной программе управляет дискретным перемещением по окружности с определенными шагом диска 2 с дер- жателем 3. Для углового перемещения диска 2 с держателем 3 требуется электрическая нагрузка электромагнита 13 тока, которым индуцируются в алюминиевом диске 2 .электромагнитные силы вращения. При электрической нагрузке электромагнита 13 происходит дискретное перемещение диска 2 с держателем 3 по постоянному шагу штрихов, нанесенных, например механическим способом, на шкалах держателя 3 и линейки 11. Дискретное перемещение диска 2 с держателем 3 осуществляется по программе вычислительной машины 10, сигнал выхода которой подается на вход источника 17 постоянного тока питания пьезокерамическиХ пластин 15 изгиба. По такому сигналу блок 17 :выдает постоянное напряжение, от которого -пластины 15 изгибаются во взаимно противоположных направлениях
и своими наконечниками 18 зажимают ось 1. Фиксация.оси 1 с диском 2 и держателем 3 соответствует тому моменту, когда штрихи на шкалах держателя 3 и линейки 11 совпадают по наибольшей площади перпендикулярно световому лучу источника 12 света.
Интервал дискретности во времени управляется блоком 9.
При использовании изобретения точность углового перемещения подвижной части предлагаемого столика по сравнению с известным повышается на 80%.
фиг. 2
Вид А
фаг.З
